一种全自动人眼视光检查装置和方法与流程
1.本发明属于眼视光学技术领域,涉及的是一种以近红外光源作为测量光源,通过光学镜头和相机对人眼视光功能进行综合检查的装置,尤其是一种全自动人眼视光检查装置和方法。
背景技术:
2.近视屈光不正被列为世界三大眼疾之一,我国是近视大国,近视人数已近4亿,其中青少年约2.7亿。2018年,我国学生近视发病率居世界第二,近视人数世界第一。因此,教育部与国家卫生健康委员会拟将儿童青少年近视防控工作、总体近视率和体质健康状况纳入政府绩效考核指标。为更好的进行近视防控,需要加强近视筛查频率,做到早发现早干预。国家有关部门也出台了相关政策和指导意见,要求中小学每半年为学生进行一次屈光度检查,有条件的每季度进行一次,并建立视光健康档案。由于我国人口基数庞大,生育率相对发达国家也相对较高。因此,针对儿童及青少年的屈光筛查工作量巨大。
3.目前市场中的验光设备一般应用场景为医院、视光中心、眼镜店等场所。设备操作由医师、验光师等有专业背景的人员完成。但筛查工作主要在学校进行,由老师进行操作。这就要求设备的操作要简化,自动化程度高。
4.专利cn104095610b实现了一种人眼屈光度和角膜曲率的测量装置。该发明需要手动对准,对操作要求较高,测量耗时较多,难以满足大规模屈光筛查的需求。为应对大规模屈光筛查场景,急需一款测量速度快、操作简便、高效、自动化程度高的产品。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种测量速度快、自动测量双眼屈光度、角膜曲率、瞳孔直径等多种生物学参数的全自动人眼视光检查装置和方法。
6.本发明解决其技术问题是采取以下技术方案实现的:
7.一种全自动人眼视光检查装置,由光路组件及三维运动平台构成,所述的光路组件固定于三维运动平台的上端,通过三维运动平台在x、y、z三个方向上的运动完成与人眼的对准,其特征在于:所述的光路组件由屈光测量系统、曲率测量系统及自动对焦系统构成,所述的屈光测量系统用于对人眼的屈光度进行测量;所述的曲率测量系统用于对人眼角膜的曲率进行测量;所述的自动对焦系统用于对人眼进行定位。
8.而且,所述的屈光测量系统由投射光路、屈光测量光路及雾视光路构成,
9.所述的投射光路由屈光测量光源、聚光镜、中孔反射镜、屈光接目镜及分光镜构成,在屈光测量光源的前方设置有聚光镜,聚光镜将收集的光线投射到其前方的中孔反射镜上,中孔反射镜依次通过其前方设置屈光接目镜及分光镜将光线投射在眼底,形成一个汇聚的光斑;
10.所述的屈光测量光路由分光镜、屈光接目镜、中孔反射镜、环形光阑、锥形镜、屈光测量物镜及屈光测量相机构成,所述分光镜将眼底汇聚的光斑反射到其后方的屈光接目镜
上,屈光接目镜依次经中孔反射镜、环形光阑、锥形镜及屈光测量物镜在屈光测量相机上形成一个光环,通过对光环形态的分析,得到被测人眼的屈光度信息;
11.所述的雾视光路用于在屈光测量时引导人眼晶体放松,从而消除人眼晶体调节对测量结果的影响,其由视标、屈光补偿镜、中继镜、二向色镜、曲率接目镜及分光镜组成。
12.而且,所述屈光测量光源为近红外波段非相干光源,中心波长范围为700nm~1100nm;
13.所述聚光镜为光学透镜,用于收集并会聚屈光测量光源所发出的光线,其焦距范围为10mm~50mm;
14.所述中孔反射镜为中央带孔的平面反射镜,中央小孔直径范围0.5
‑
2.5mm,用于投射光路时,其作用是将屈光测量光源发出的光线投射到眼底形成光斑;用于屈光测量光路时,其作用是反射从眼底反射回的光线进入屈光测量相机;
15.所述屈光接目镜为光学透镜,焦距范围为30mm~100mm;用于投射光路时,其作用是将屈光测量光源发出的光线投射在眼底,形成一个会聚的光斑;用于屈光测量光路时,其作用是收集在眼底会聚光斑处由人眼反射回的光线,用于屈光度的测量;
16.所述分光镜为光学透反镜,可按波段选择透过或反射光线,是多个光路的共用光学元件,其作用是在反射屈光测量光源所属的近红外波段的光线的同时,透过曲率测量光源所属的近红外波段的光线以及雾视视标所属的可见光波段的光线。
17.而且,所述屈光接目镜在光轴上偏转设置,该偏转角度为3
°
~10
°
。
18.而且,所述环形光阑为光学元件,其上有一个圆环形区域可以透过光线,其它区域会阻拦光线,其在光轴上的位置与人眼角膜光学共轭;
19.所述锥形镜为光学透镜,其表面为一个圆锥面,锥面与平面夹角3
°
~10
°
;
20.所述屈光测量物镜为光学透镜,用于保证屈光测量光路的像平面位于屈光测量相机上;
21.所述屈光测量相机为ccd或cmos相机,感光面积不大于1英寸,分辨率不低于30万像素,位于屈光测量光路的像平面上,形成图像,用于后期分析。
22.而且,所述的曲率测量系统由曲率照明模组及曲率测量光路构成,
23.所述的曲率照明模组由照明灯板、近红外波段led光源及两个对焦光源构成,在所述的照明灯板上设置有一个或多个同心圆环,该同心圆环由若干个间隔均布的近红外波段的led光源构成,所述的两个对焦光源在照明灯板的两侧对称设置,且各对焦光源与照明灯板的夹角为20
°
~70
°
;
24.所述的曲率测量光路由分光镜、曲率接目镜、二向色镜、曲率测量物镜及曲率测量相机构成,在所述曲率照明模组的后方设置有分光镜,分光镜将人眼角膜反射回的近红外波段的光线透过,并在曲率接目镜上进行收集,通过二向色镜将光线反射到曲率测量物镜上,曲率测量物镜用于保证曲率测量光路的像平面位于曲率测量相机上,并使像大小与曲率测量相机的感光面积相匹配。
25.而且,所述近红外波段led光源的中心波长为700nm~1100nm;
26.所述对焦光源为近红外波段准直光源,其中心波长与近红外波段led光源相同或相近;
27.所述曲率接目镜为光学透镜,焦距范围50mm~160mm;
28.所述二向色镜为光学透反镜,用于透过雾视光路中视标发出的可见光光线,并反射用于曲率测量的近红外光线;
29.所述曲率测量物镜为光学透镜,用于保证曲率测量光路的像平面位于曲率测量相机上,并使像大小与曲率测量相机的感光面积相匹配;
30.所述曲率测量相机为ccd或cmos相机,感光面积不大于1英寸,分辨率不低于30万像素,位于曲率测量光路的像平面上,形成图像,用于后期分析。
31.而且,所述的自动对焦系统由两组成像模组构成,该两个成像模组呈一定夹角对称分布在曲率照明模组的两侧,其夹角范围为20
°
~70
°
;所述的成像模组由成像镜头以及位于成像镜头后部的成像相机构成。
32.而且,所述成像镜头为一片或一组光学镜片,其焦距不大于50mm,成像视场不小于50
°
,光圈不小于f#12;
33.所述成像相机为ccd或cmos相机,感光面积不大于1英寸,分辨率不低于30万像素,其位于成像镜头的后焦平面上,对人眼瞳孔进行成像,通过分析瞳孔的位置对人眼进行定位。
34.一种全自动人眼视光检查方法,其特征在于:包括如下步骤:
35.步骤一,将三维运动平台复位至x、y、z三轴居中的位置;
36.步骤二,开始测量,三维平台向左运动30mm,自动对焦系统检测到左眼瞳孔,并计算当前瞳孔位置与预设的测量位置在三个方向上的偏差;
37.所述预设的测量位置是视轴与机器光轴重合,且角膜顶点位于设备标准工作距离的位置;
38.步骤三,根据步骤二计算的偏差,驱动三维运动平台,使得左眼瞳孔移动到预设的测量位置,完成x、y、z粗对准;此时,在曲率测量相机中可以得到较清晰的同心圆环图像,计算同心圆环的中心坐标与预设测量位置的x、y方向的偏差;
39.步骤四,根据步骤三计算的偏差,驱动三维运动平台,完成x、y方向精对准;此时,曲率测量相机中可以检测到对焦光点,通过对焦光点的位置,可以计算出当前角膜顶点与预设测量位置的z方向偏差;如果检测失败,说明z向偏离过大,此时再次调用自动对焦系统进行对准;
40.步骤五,根据步骤四计算的偏差,驱动三维运动平台,完成z方向精对准;对准后,曲率测量相机采集图像,进行角膜曲率的测量;完成后,开启屈光测量光源和屈光测量相机,进行屈光测量;
41.步骤六,屈光测量完成后,关闭屈光测量光源和屈光测量相机;同时,三维运动平台自动向右移动到偏离中心右侧30mm的位置,开始对右眼进行自动测量;
42.步骤七,双眼测量完成后,三维平台自动复位,等待下次测量。
43.本发明的优点和积极效果是:
44.1、本发明采用无屈光补偿模组的屈光测量系统,省去了复杂的运动结构及电路控制。结构紧凑、简洁,便于与其它功能模块整合,便于生产、调试。与传统的“环厚法”不同,本发明采用全新的光学设计,使用锥形镜,将不同屈光度人眼的眼底反射光点转变为直径不同的圆环,进而得到人眼的屈光信息。
45.2、本发明通过将屈光测量光源设计为近红外波段非相干光源即非激光光源,采用
非相干光源的优点是不会和相干光源一样形成散斑,避免了散斑对测量精度的影响。
46.3、通过采用双相机结构(自动对焦系统中的两个成像相机),自动识别瞳孔,并通过双目立体视觉算法精确定位瞳孔空间坐标。并可以驱动三维运动平台自动对准人眼并测量双眼视光参数。省去了人工对准、测量的操作步骤,大幅提高筛查效率。
附图说明
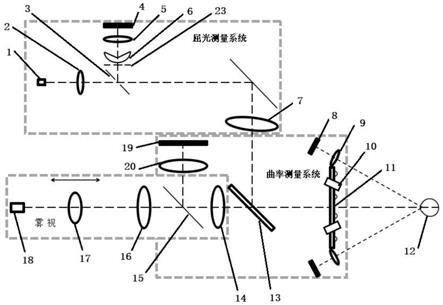
47.图1是本发明全自动人眼视光检查装置的光路组件结构示意图;
48.图2是自动对准模块结构示意图;
49.图3是标定棋盘格图;
50.图4是自动对焦系统成像相机图像,a为相机1拍摄的图像,b为相机2拍摄的图像;
51.图5是测量流程图。
52.附图标记说明:
[0053]1‑
屈光测量光源、2
‑
聚光镜、3
‑
中孔反射镜、4
‑
屈光测量相机、5
‑
屈光测量物镜、6
‑
锥形镜、7
‑
屈光接目镜、8
‑
成像相机、9
‑
成像镜头、10
‑
对焦光源、11
‑
曲率照明模组、12
‑
眼睛、13
‑
分光镜、14
‑
曲率接目镜、15
‑
二向色镜、16
‑
中继镜、17
‑
屈光补偿镜、18
‑
视标、19
‑
曲率测量相机、20
‑
曲率测量物镜、21
‑
成像相机一、22
‑
成像相机二、23
‑
环形光阑。
具体实施方式
[0054]
以下结合附图对本发明的具体实施方案做进一步详述:
[0055]
本实施方案所述的是以非接触方式自动测量人眼屈光度、角膜曲率、瞳孔直径等视光学参数的设备和方法。在下面的描述中,将装置相对于患者眼睛12前后移动的方向设定为z轴,将与z轴垂直且与地面平行的方向设定为x轴,将与z轴垂直且与地面也垂直的方向设定为y轴。
[0056]
本实施方案所述设备主要由光路组件和三维运动平台构成。其中,光路组件由屈光测量系统、曲率测量系统和自动对焦系统构成。如图1所示,屈光测量系统包括投射光路、屈光测量光路和雾视光路。其中,投射光路包括屈光测量光源1、聚光镜2、中孔反射镜3、屈光接目镜7和分光镜13。其中,中孔反射镜和屈光接目镜与屈光测量光路共用。而分光镜与屈光测量光路、雾视光路光路共用。
[0057]
其中,屈光测量光源为中心波长850nm的led。
[0058]
其中,聚光镜为焦距25mm的非球面聚光镜。
[0059]
其中,中孔反射镜为中央带孔的平面反射镜,小孔直径1.5mm。用于投射光路,其作用是通过屈光测量光源发出的光线;用于屈光测量光路,其作用是反射从眼底反射回的光线进入屈光测量相机。由于中央区域的小孔不能反射光线,因此,在经过反射后从眼底反射回的光线会变成一个光环,而不再是一个光斑。在光轴上,中央小孔和人眼晶体光学共轭(互为物像关系)。因此,该小孔还可以防止由人眼晶体中心区域反射的由屈光测量光源发出的光线进入屈光测量相机。避免了这部分光线对屈光测量形成的干扰,保证了测量精度。
[0060]
其中,屈光接目镜为焦距50mm的双凸透镜,倾斜角度8
°
。用于投射光路时,其作用是将屈光测量光源发出的光线投射在眼底,形成一个会聚的光斑;用于屈光测量光路时,其作用是收集在眼底会聚光斑处由人眼反射回的光线,用于屈光度的测量。所述屈光接目镜
与光轴并不垂直,而是偏转了一个角度,范围3
°
~10
°
。偏转角度可以防止该镜片的表面反射屈光测量光源发出的光线进入屈光测量相机,对测量精度造成影响。
[0061]
其中,分光镜可反射850nm的近红外光,同时可以透过950nm的近红外光和可见光。可按波段选择透过或反射光线,是多个光路的共用光学元件。其作用是在反射屈光测量光源所属的近红外波段的光线的同时,透过曲率测量光源所属的近红外波段的光线以及雾视视标所属的可见光波段的光线。
[0062]
屈光测量光路包括分光镜、屈光接目镜、中孔反射镜、环形光阑23、锥形镜6、屈光测量物镜5和屈光测量相机4。其作用是收集在眼底会聚光斑处由人眼反射回的光线,并通过锥形镜和屈光测量物镜的作用,在屈光测量相机上形成一个光环。通过对光环形态的分析,得到被测人眼的屈光度信息。所述分光镜、屈光接目镜和中孔反射镜为共用光学元件。
[0063]
其中,环形光阑有一个圆环形区域可以透过光线,该圆环区域内径5mm,外径6mm。具体的,其上有一个圆环形区域可以透过光线,其它区域会阻拦光线。其在光轴上的位置与人眼角膜光学共轭(互为物像关系)。因此,可以拦截掉由人眼角膜中心区域反射的由屈光测量光源发出的光线。避免了这部分光线进入屈光测量相机后对屈光测量形成的干扰,保证了测量精度。
[0064]
其中,锥形镜一个圆锥面镜,锥面与平面夹角5
°
。其作用是进一步放大中孔反射镜所形成的光环,使光环的最终尺寸与屈光测量相机的感光面积相匹配。进而使屈光测量相机中有足够多的像素可用于屈光度的计算,保证了测量精度。
[0065]
其中,屈光测量物镜为焦距25mm的双胶合透镜。用于保证屈光测量光路的像平面位于屈光测量相机上。
[0066]
其中,屈光测量相机为cmos相机,感光面积1/2英寸,分辨率120万像素。
[0067]
屈光测量流程为:屈光测量光源发出光线,经过聚光镜会聚通过中孔反射镜的小孔后,被屈光接目镜投射在人眼眼底,形成一个会聚的光斑。该光斑被人眼眼底反射后再次被屈光接目镜收集,经由中孔反射镜反射后形成光环,再由锥形镜和屈光测量物镜折射,最终在屈光测量相机中形成圆环图像。通过对圆环图像的形态分析,可以得到人眼的屈光度信息。
[0068]
所述雾视光路包括视标18、屈光补偿镜17、中继镜16、二向色镜15、曲率接目镜14和分光镜组成。其中二向色镜和曲率接目镜与曲率测量系统中的曲率测量光路共用。分光镜与多个光路共用。
[0069]
所述雾视光路的作用是在屈光测量时引导人眼晶体放松,从而消除人眼晶体调节对测量结果的影响,这是一个十分成熟的技术,不再赘述。
[0070]
曲率测量系统包括曲率照明模组和曲率测量光路。
[0071]
其中,曲率照明模组11为一照明灯板,其上有32个中心波长950nm的led光源。该32个led排列成2个同心圆环。当其一同发光时,可在人眼角膜上形成1个或多个光环。这些光环由角膜反射进入曲率测量光路,并最终在曲率测量相机中形成1个或多个同心圆环图案。通过对圆环图案的形态分析,可以得到人眼角膜的曲率信息。
[0072]
led光源的中心波长不同于屈光测量光源的中心波长,防止两个测量系统相互干扰。所述led的数量可由形成圆环的数量决定,最少为1圈16个,本实施例中选择32个。
[0073]
其中,曲率照明模组上还设置有对焦光源10,该对焦光源为2个950nm的准直led,
可以发出平行光。该2个准直光源呈30
°
夹角对称分布在照明模组上。其可在人眼角膜上形成两个对称的对焦光点。通过计算对焦光点的位置,可以得到人眼角膜顶点在z方向上的精确位置。
[0074]
曲率测量光路包括分光镜、曲率接目镜、二向色镜、曲率测量物镜20和曲率测量相机19。
[0075]
其中,曲率接目镜为焦距范围100mm的双凸透镜。其作用是收集人眼角膜反射回的由曲率照明模组发出的光线。
[0076]
其中,二向色镜为可透过可见光波段的光线,同时,反射近红外波段的光线。具体的,可以透过雾视光路中视标发出的可见光光线,并反射用于曲率测量的近红外光线。
[0077]
其中,曲率测量物镜为焦距75mm的低畸变透镜组。用于保证曲率测量光路的像平面位于曲率测量相机上,并使像大小与曲率测量相机的感光面积相匹配。进而使曲率测量相机中有足够多的像素可用于曲率的计算,保证了测量精度。
[0078]
其中,曲率测量相机为cmos相机,感光面积1/2英寸,分辨率120万像素。
[0079]
曲率测量流程为:曲率照明模组发出光线,投射在人眼角膜上,形成2个同心光环。光环被人眼角膜反射后,被曲率接目镜收集后,由曲率测量物镜成像在曲率测量相机上。通过分析同心圆环图案的形态,可以得到人眼的曲率信息。
[0080]
自动对焦系统,包括两套相同的成像模组。如图2所示,每套成像模组包括成像镜头9和成像相机8。两套成像模组呈45
°
夹角对称分布在曲率照明模组两侧,光轴交点为角膜顶点。
[0081]
其中,成像镜头为焦距8mm的透镜组,成像视场70
°
,光圈f#4。
[0082]
其中,成像相机为cmos相机,感光面积1/4英寸,分辨率80万像素。
[0083]
该自动对焦系统为双目立体视觉系统,可精确定位人眼的位置。由于角膜顶点难以识别,而瞳孔在红外照明时特征明显,易于识别。因此,以瞳孔为目标进行定位,并加入适当偏移便可以较为精确的定位人眼角膜顶点。
[0084]
由于装配的误差,需要对自动对焦系统中的双目相机进行位置标定。以图3所示棋盘格作为标定图,采集多幅不同角度和距离的棋盘格图像。将图像输入标定算法,得到双目系统的内参和外参数据,此参数以相机1为参考坐标。
[0085]
三维运动平台为一电动平台,可沿x、y、z三个方向运动。这是一个十分成熟的技术,不再赘述。所述光路组件固定在三维运动平台的上端。因此,光路组件也可以沿x、y、z三个方向运动,并完成与人眼的对准。
[0086]
图4为自动对焦系统实际拍摄的人眼图像,可计算出人眼瞳孔中心的像素坐标。再根据标定参数,可计算出人眼瞳孔在成像相机一21以及成像相机二22坐标系中的三维位置。通过比较人眼瞳孔位置与预设位置的偏差,可以得到x、y、z的偏移量。最后,可通过驱动三维运动平台实现人眼的自动对准。
[0087]
图5为本实施例测量流程图。
[0088]
在测量前将三维运动平台复位至x、y、z三轴居中的位置。
[0089]
开始测量后,首先,使三维平台向左运动30mm,自动对焦系统检测到左眼瞳孔,并计算当前瞳孔位置与预设的测量位置在三个方向上的偏差。根据计算的偏差,驱动三维运动平台,使得左眼瞳孔移动到预设的测量位置,完成x、y、z粗对准。
[0090]
其次,计算曲率测量相机中得到的同心圆环图像的中心坐标(当前角膜顶点坐标)与预设测量位置的x、y方向的偏差。根据计算的偏差,驱动三维运动平台,完成x、y方向精对准。
[0091]
再次,在曲率测量相机中检测对焦光点,通过对焦光点的位置,可以计算出当前角膜顶点与预设测量位置的z方向偏差。根据计算的偏差,驱动三维运动平台,完成z方向精对准。如果检测失败,说明z向偏离过大,此时再次调用自动对焦系统进行对准。对准后,曲率测量相机采集图像,进行角膜曲率的测量。完成后,开启屈光测量光源和屈光测量相机,进行屈光测量;
[0092]
最后,在完成左眼的测量后,关闭屈光测量光源和屈光测量相机。同时,三维运动平台自动向右移动到偏离中心右侧30mm的位置,开始对右眼进行自动测量;双眼测量完成后,三维平台自动复位,等待下次测量。
[0093]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1