一种多姿态多自由度的下肢康复机器人
1.本发明属于医疗器械技术领域,具体涉及一种多姿态多自由度 的下肢康复机器人。
背景技术:
2.人体下肢包括髋关节、大腿、膝关节、小腿、踝关节、脚,髋关 节作为调动整个人体下肢运动的主力部分,必须要让髋关节尽可能多 的活动起来。髋关节具有外展/内收、前屈/后伸、内旋/外旋这3种 运动形式。其中外展/内收、前屈/后伸这两个方向上的自由度运用比 较多,而对于转动相对较小的内旋/外旋则不进行考虑。膝关节的主 要运动为弯曲和伸展,踝关节的主要运动为前后移动,但是目前的下 肢外骨骼机器人在个性化、人性化的设计上还远远不足,机器人与患 者,机器人与医生之间的协调也不足,不能满足患者下肢在多个自由 度上同时进行运动。随着机器人技术的蓬勃发展,近年来,研究人员 研制出了许多用于康复训练的机器人。
[0003][0004]
下肢康复机器人属于康复机器人的一种,主要用来辅助患者的下 肢康复训练。现有的下肢康复训练机器人已经可以完成髋、膝、踝关 节的动作,具有主动、被动、抗阻等训练模式,也有传感器可以进行 步态分析和步态训练。但是它们仍然存在单腿只有三个自由度、单个 机器人只能使用一种姿态(坐姿态或站姿态)来进行训练等不足,在 多自由度和多姿态训练方面均有待进一步提高。
技术实现要素:
[0005]
本发明的目的是克服现有技术中存在的不能实现下肢多自 由训练且只能一种姿态下进行康复训练的缺陷,提供了一种患 者在坐、躺以及站三种姿态下均可做康复训练且具有多种自由 度训练的多姿态多自由度的下肢康复机器人。
[0006]
本发明解决其技术问题所采用的技术方案是:
[0007]
一种多姿态多自由度的下肢康复机器人,其特征在于:包 括支撑机构、安装在所述支撑机构上的悬吊机构、对称安装在 所述支撑机构上的机械腿宽度调节机构以及安装在所述机械腿 宽度调节机构上的机械腿;所述机械腿包括依次设置的髋关节 组件、大腿组件、膝关节组件、小腿组件、踝关节组件以及脚 踏板;
[0008]
所述支撑机构包括固定平台、一端转动连接在所述固定平 台上且另一端通过立柱搭接在所述固定平台上的活动平台以及 固定端安装在所述固定平台上其伸缩端转动连接在所述活动平台上 的姿态变换电动推杆;
[0009]
所述悬吊机构包括固定安装在所述活动平台上的悬吊支 架、安装在所述悬吊支架上的座椅支架以及固定端转动安装在 所述活动平台上的座椅电动推杆;所述座椅电动推杆的伸缩端 固定连接在所述座椅支架上的背部支架上;
[0010]
所述髋关节组件包括安装在所述机械腿宽度调节机构上的 回转驱动、安装在所
述回转驱动的输出端的髋关节支座、安装 在所述髋关节支座上的髋关节电机、与所述髋关节电机输出轴 同轴设置的髋关节传动机构以及与所述髋关节传动机构的输出 端同轴设置的髋关节转轴。
[0011]
进一步地,所述大腿组件包括通过大腿连接件与所述髋关 节转轴转动连接的大腿壳体、安装在所述大腿壳体内部的大腿 调节电机、与所述大腿调节电机输出轴同轴设置的大腿主动齿 轮、与所述大腿主动齿轮外啮合连接的大腿从动齿轮以及与所 述大腿从动齿轮同轴设置的大腿调节滚珠丝杠;所述大腿调节 滚珠丝杠的螺母固定安装在膝关节连接板上;所述膝关节连接 板上开设有大腿导向槽,所述大腿调节滚珠丝杠的末端设置在 有与所述滑槽相适配的大腿导向块。
[0012]
进一步地,所述膝关节组件包括固定安装在所述大腿调节 机构上的膝关节支座、安装在所述膝关节支座上的膝关节电机、 与所述膝关节电机输出轴同轴设置的膝关节传动机构以及与所 述膝关节传动机构输出端同轴设置的膝关节转轴。
[0013]
进一步地,所述小腿组件包括通过小腿连接件与所述膝关 节组件转动连接的小腿壳体、安装在所述小腿壳体内的小腿调 节电机、与所述小腿调节电机输出轴同轴设置的小腿主动齿轮、 与所述小腿主动齿轮外啮合连接的小腿从动齿轮以及与所述小 腿从动齿轮的输出轴同轴设置的小腿调节滚珠丝杠;所述小腿 调节滚珠丝杠的螺母固定安装在踝关节连接板上;所述踝关节 连接板上开设有小腿导向槽,所述小腿调节滚珠丝杠的末端设 置在有与所述小腿导向槽相适配的小腿导向块。
[0014]
进一步地,所述踝关节组件包括安装在所述小腿组件上的 踝关节支座、安装在所述踝关节支座上的踝关节减速电机、与 所述踝关节减速电机的输出轴同轴设置的脚踏连杆;所述脚踏 连杆的尾端固定安装有脚踏板。
[0015]
进一步地,所述机械腿宽度调节机构包括固定安装在所述 悬吊机构上的宽度调节滑轨和宽度调节电机、通过回转驱动支 撑座与所述回转驱动连接且与所述宽度调节滑轨相适配的宽度 调节滑块、与所述宽度调节电机的输出轴同轴设置的宽度调节 滚珠丝杠;所述宽度调节滚珠丝杠的螺母与所述宽度调节滑块 固定连接。
[0016]
进一步地,所述髋关节传动机构包括与所述髋关节电机输 出轴同轴设置的髋关节主动带轮和通过同步带与所述髋关节主 动带轮传动的髋关节从动带轮;所述髋关节转轴与所述髋关节 从动带轮的输出轴同轴设置,所述髋关节转轴的外侧通过减速 器与所述大腿连接件连接。
[0017]
进一步地,所述膝关节传动机构包括与所述膝关节电机输 出轴同轴设置的膝关节主动带轮和通过同步带与所述膝关节主 动带轮传动的膝关节从动带轮;所述膝关节转轴与所述膝关节 从动带轮的输出轴同轴设置,所述髋关节转轴的外侧通过减速 器与所述小腿连接件连接。
[0018]
进一步地,所述髋关节支座上设置有用于调节传动带的张 紧轮。
[0019]
更进一步地,所述大腿壳体的外侧和小腿壳体的外侧均安 装有倾角传感器。
[0020]
本发明的一种多姿态多自由度的下肢康复机器人的有益效 果是:
[0021]
1、本发明设置左右腿训练的机械腿机构,且设置有机械腿宽度 调节装置,根据患者的体型调节两个机械腿之间的距离,使本发明能 够适用不同体型的人群,且利用回转驱动实现髋关节外展/内收动作, 利用髋关节电机和转轴实现髋关节的前屈/后伸动作,回转
驱动的使 用更大程度上节省安装空间、易于维护。本发明设置的膝关节组件、 踝关节组件实现腿部的前屈/后伸动作。
[0022]
2、本发明设置有大腿调节机构和小腿调节机构,调节大腿组件 和小腿组件的长度以适用不同身高的患者,使本发明更具使用的广泛 性,且使用滚珠丝杠和电机实现长度的调节,结构简单易于控制。
[0023]
3、本发明的悬吊机构上安装有可转动的座椅支架,在座椅电动 推杆和姿态变换电动推杆的共同作用下实现患者的躺姿态、坐姿态以 及站姿态的转换,且在支撑机构上设置有万向轮,方便整个康复机器 人的移动。
附图说明
[0024]
下面结合附图和具体实施方式对本发明作进一步详细的说 明。
[0025]
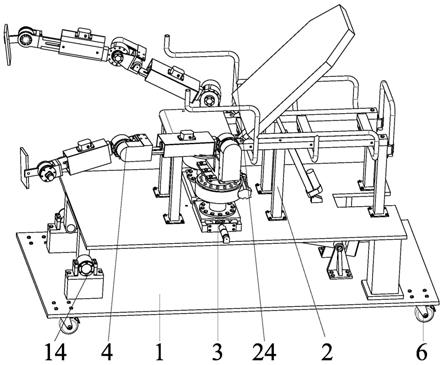
图1是本发明实施例的整体结构示意图;
[0026]
图2是本发明实施例的支撑机构的结构示意图;
[0027]
图3是本发明实施例的悬吊机构的结构示意图;
[0028]
图4是本发明实施例的机械腿的结构示意图;
[0029]
图5是本发明实施例的髋关节组件的爆炸图;
[0030]
图6是本发明实施例的大腿组件的爆炸图;
[0031]
图7是本发明实施例的小腿组件的爆炸图;
[0032]
图8是本发明实施例的脚踏板连接示意图。
[0033]
图9是本发明实施例的机械腿宽度调节机构的结构示意图;
[0034]
图10是本发明实施例的座椅支架的结构示意图;
[0035]
图11是本发明实施例的转动机构的结构示意图;
[0036]
图中:1、支撑机构,11、固定平台,12、活动平台,13、 姿态变换电动推杆,14、转动机构,15、立柱,2、悬吊机构,21、 悬吊支架,22、座椅支架,221、背部支架,222、臀部支架, 23、座椅电动推杆,24、扶手,25、座椅垫,3、机械腿宽度调 节机构,31、宽度调节滑轨,32、宽度调节电机,33、回转驱 动支撑座,34、宽度调节滑块,35、宽度调节滚珠丝杠,4、机 械腿,41、髋关节组件,411、回转驱动,412、髋关节支座,413、髋关节电机,414、髋关节传动机构,4141、髋关节主动 带轮,4142、髋关节从动带轮,415、髋关节转轴,416、张紧 轮,42、大腿组件,421、大腿连接件,422、大腿壳体,423、 大腿调节电机,424、大腿主动齿轮,425、大腿从动齿轮,426、 大腿调节滚珠丝杠,427、膝关节连接板,428、大腿导向槽, 429、大腿导向块,43、膝关节组件,431、膝关节支座,432、 膝关节电机,433、膝关节传动机构,4331、膝关节主动带轮, 4332、膝关节从动带轮,434、膝关节转轴,44、小腿组件,441、 小腿连接件,442、小腿壳体,443、小腿调节电机,444、小腿 主动齿轮,445、小腿从动齿轮,446、小腿调节滚珠丝杠,447、 踝关节连接板,448、小腿导向槽,449、小腿导向块,45、踝 关节组件,451、踝关节支座,452、踝关节减速电机,46、脚 踏连杆,47、脚踏板,5、倾角传感器,6、万向轮。
具体实施方式
[0037]
现在结合附图对本发明作进一步详细的说明。这些附图均为简化 的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本 发明有关的构成。
[0038]
如图1
‑
图11所示的本发明的一种多姿态多自由度的下肢康复机 器人的具体实施例,包括支撑机构1、安装在支撑机构1上的悬 吊机构2、对称安装在支撑机构1上的机械腿宽度调节机构3 以及安装在机械腿宽度调节机构3上的机械腿4;机械腿4包括 依次设置的髋关节组件41、大腿组件42、膝关节组件43、小腿 组件44、踝关节组件45以及脚踏板47;支撑机构1包括固定 平台11、一端转动连接在固定平台11上且另一端通过立柱15 搭接在固定平台11上的活动平台12以及固定端安装在固定平台 11上其伸缩端转动连接在活动平台12上的姿态变换电动推杆13;其 中当患者躺上后,靠近脚部的一端的活动平台12通过转动机构14 实现与固定平台11的转动连接,参照图11转动机构14包括固 定安装在固定平台11上的转动座和固定安装在活动平台12上 的转轴,转动座与转轴之间通过轴承转动连接。悬吊机构2包 括固定安装在活动平台12上的悬吊支架21、安装在悬吊支架 21上的座椅支架22以及固定端转动安装在活动平台12上的座 椅电动推杆23;座椅电动推杆23的伸缩端固定连接在座椅支架 22上的背部支架221上,其中如图10所示的座椅支架22包括 固定安装在悬吊支架21上的臀部支架222和转动连接在臀部支 架222上的背部支架221,且在臀部支架222和背部支架221 上均安装有座椅垫25,以增强患者在康复训练过程中的舒适度。 座椅电动推杆23的伸缩端通过铰接支架转动连接在背部支架 221上,启动座椅电动推杆23实现背部支架221的上升和下降, 从而实现患者在坐姿态和躺姿态之间的转换,也可以对患者躺 姿态和坐姿态的角度进行调整,进一步地提高患者的舒适度。 本发明实施例的悬吊支架21的左右两侧均安转有扶手24,用于 支撑患者站立或对患者起到保护作用。
[0039]
本发明实施例中在座椅支架22的左右两侧的活动平台12 上均设置有机械腿宽度调节机构3,如图9所示,机械腿宽度调 节机构3包括固定安装在悬吊机构2上的宽度调节滑轨31和宽 度调节电机32、通过回转驱动支撑座33与回转驱动411连接且 与宽度调节滑轨31相适配的宽度调节滑块34、与宽度调节电机 32的输出轴同轴设置的宽度调节滚珠丝杠35;宽度调节滚珠丝 杠35的螺母与宽度调节滑块34固定连接。启动宽度调节电机 32,带动宽度调节滚珠丝杠35的螺母移动,从而实现固定在宽 度调节滚珠丝杠35的螺母上的宽度调节滑块34在宽度调节滑 轨31上移动,实现左右两个机械腿4之间的距离的调节,使本 机器人适用不同胖瘦、不同体型的患者。
[0040]
本发明实施例的机械腿4结构如图4到图9所示,参照图5, 髋关节组件41包括安装在机械腿宽度调节机构3上的回转驱动 411、安装在回转驱动411的输出端的髋关节支座412、安装在 髋关节支座412上的髋关节电机413、与髋关节电机413输出轴 同轴设置的髋关节传动机构414以及与髋关节传动机构414的 输出端同轴设置的髋关节转轴415。其中髋关节传动机构414 包括与髋关节电机413输出轴同轴设置的髋关节主动带轮4141 和通过同步带与髋关节主动带轮4141传动的髋关节从动带轮 4142;髋关节转轴415与髋关节从动带轮4142的输出轴同轴设 置,髋关节转轴415的外侧通过减速器与大腿连接件421连接。 髋关节组件41的外围设置有防尘外罩,髋关节支座412上设置 有用于调节传动带的张紧轮416,回转驱动411带动髋关节支座412转动,以实现髋关节的内收/外展动作,启动髋关节电机413, 带动髋关节电机413输出轴同轴设置的髋关节主动带轮4141转 动,即实现髋关节转轴415的转动,实现膝关节的前屈/后伸动 作。
[0041]
参照图6,大腿组件42包括通过大腿连接件421与髋关节 转轴415转动连接的大腿壳体422、安装在大腿壳体422内部的 大腿调节电机423、与大腿调节电机423输出轴同轴设
置的大腿 主动齿轮424、与大腿主动齿轮424外啮合连接的大腿从动齿轮 425以及与大腿从动齿轮425同轴设置的大腿调节滚珠丝杠 426;大腿调节滚珠丝杠426的螺母固定安装在膝关节连接板 427上;膝关节连接板427上开设有大腿导向槽428,大腿调节 滚珠丝杠426的螺杆末端设置在有与滑槽相适配的大腿导向块 429。启动大腿调节电机423,带动大腿调节滚珠丝杠426的螺 母移动,即带动固定安装在其螺母上的大腿导向块429在大腿 壳体422上滑动,从而实现大腿组件42的长度的调节,以适用 不同大腿长度的患者。
[0042]
参照图6,膝关节组件43包括固定安装在大腿调节机构上的 膝关节支座431、安装在膝关节支座431上的膝关节电机432、 与膝关节电机432输出轴同轴设置的膝关节传动机构433以及 与膝关节传动机构433输出端同轴设置的膝关节转轴434,其中 膝关节传动机构433包括与膝关节电机432输出轴同轴设置的 膝关节主动带轮4331和通过同步带与膝关节主动带轮4331传 动的膝关节从动带轮4332;膝关节转轴434与膝关节从动带轮 4332的输出轴同轴设置,髋关节转轴415的外侧通过减速器与 小腿连接件441连接。其中膝关节传动机构433包括与膝关节 电机432输出轴同轴设置的膝关节主动带轮4331和通过同步带 与膝关节主动带轮4331传动的膝关节从动带轮4332;膝关节转 轴434与膝关节从动带轮4332的输出轴同轴设置,髋关节转轴 415的外侧通过减速器与小腿连接件441连接。启动膝关节电机 432,带动与膝关节电机432的输出轴同轴设置的膝关节主动带 轮4331转动,通过同步带带动膝关节从动带轮4332转动,即 实现膝关节转轴434的转动,从而实现膝关节的前屈后伸动作。
[0043]
参照图7,小腿组件44包括通过小腿连接件441与膝关节组 件43转动连接的小腿壳体442、安装在小腿壳体442内的小腿 调节电机443、与小腿调节电机443输出轴同轴设置的小腿主动 齿轮444、与小腿主动齿轮444外啮合连接的小腿从动齿轮445 以及与小腿从动齿轮445的输出轴同轴设置的小腿调节滚珠丝 杠446;小腿调节滚珠丝杠446的螺母固定安装在踝关节连接板 447上;踝关节连接板447上开设有小腿导向槽448,小腿调节 滚珠丝杠446的末端设置在有与小腿导向槽448相适配的小腿 导向块449。启动小腿调节电机443,驱动小腿调节滚珠丝杠446 的螺母移动,即带动固定在其螺母上的小腿导向块449在小腿 壳体442上滑动,从而实现小腿组价的长度的调节,以适用不 同小腿长度的患者。
[0044]
参照图7和图8,踝关节组件45包括安装在小腿组件44 上的踝关节支座451、安装在踝关节支座451上的踝关节减速电 机452、与踝关节减速电机452的输出轴同轴设置的脚踏连杆 46;脚踏连杆46的尾端固定安装有脚踏板47。启动踝关节减速 电机452,带动脚踏连杆46的转动,从而实现踝关节的前屈后 伸动作。
[0045]
本发明实施例中大腿壳体422的外侧和小腿壳体442的外 侧均安装有倾角传感器5,用来检测腿部的弯曲角度。平台底座 通过地脚螺钉固定在地面上或在平台底座的下方设置有多个万向轮 6,方便整个康复机器人的移动。
[0046]
本发明实施例的使用过程如下,当患者需要躺姿态做康复训练 时,姿态变换电动推杆13处于原始状态,活动平台12与固定平台 11平行,根据患者的体型调节机械腿宽度调节机构3,根据患者的大 腿长度、小腿长度调节大腿组件42和小腿组件44的长度,将患者的 脚部通过绑带或魔术贴固定在脚踏板47上,将患者的大腿和小腿通 过绑带或魔术贴固定在大腿壳体422和小腿壳体442上,启动各个部 位的电机,实现腿部的康复训练。当患者需要调节座姿态时,启动座 椅电动推杆23,推动背部支架221向上调节移动,以适应患者 的
舒适训练角度。
[0047]
当患者需要站姿态做康复训练时,启动姿态变换电动推杆 13,推动活动平台12的一端与固定平台11转动连接,使活动平台 12转动到与固定平台11垂直的状态,患者手握扶手24,将患者的脚 部通过白带或魔术贴固定在脚踏板47上,将患者的大腿和小腿均通 过绑带或魔术贴固定在大腿组件42和小腿组件44上,启动相应的电 机,实现患者的腿部康复训练。
[0048]
应当理解,以上所描述的具体实施例仅用于解释本发明,并不用 于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍 处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1