一种全方位智能高效灭菌仪
1.涉及紫外线灭菌装置设计领域,特别是涉及一种全方位智能高效灭菌仪。
背景技术:
2.新型冠状病毒covid
‑
19爆发以来,中国国内疫情防控虽已有所成效,但仍存在小范围爆发现象,其主要传染源大多来自于海外冷链产品的外包装,而海运是重要跨国运输途径之一,因此,对海运船舶舱室、集装箱以及到港后的冷链产品所存放的冷库、保鲜库等场所进行高效智能的灭菌杀毒,对保护相关人员健康和疫情防护工作具有重要意义。
3.研究表明紫外c波段紫外能量uv
‑
c会引起的冠状病毒内部rna的损毁,以波长在253.7nm附近的紫外线效果最佳,这种损伤抑制了受影响其繁殖能力,故科学合理地使用紫外线可有效杀灭新型冠状病毒。紫外线灭菌仪是一种利用特定波长的紫外线照射来杀灭病毒和细菌的装置。常规的室内紫外线灭菌装置通常有固定式和便携式两种,固定式的灭菌装置通过悬挂在天花板或墙壁上的紫外线灯在室内无人时进行消杀,便携式的则是通过摆放在不同的位置进行小范围内的灭菌,这两种形式的紫外灭菌装置均具有灭菌时间长、灭菌范围较小、灭菌方式单一、灭菌效果较差等缺点。因此,设计一种高效智能、机动性强且安全可靠的全方位杀菌装置具有重要价值。
4.通过对现有技术的文献检索发现,近年来,关于全方位智能灭菌装置相类似的专利文件鲜有发表,与本发明申请有关的公开资料主要包括:1、智能移动式紫外线杀菌机器人专利号:cn 201822251774.8; 2、一种智能车内用紫外线杀菌除异味装置专利号:cn 202010914513.9。
5.专利1公开了一种智能移动式紫外线杀菌机器人,在车体各个面设有紫外线灯管组,通过遥控方式对公共场所进行杀菌消毒,或是在无人环境下进行自动杀菌消毒,无法实现当有生命体进入环境时自动停止工作的功能,具有一定的局限性;专利2公开了一种智能车内用紫外线杀菌除异味装置,采用太阳能充电的供电方式,能够智能感应在车内无人时进行紫外线杀菌消毒除味,该装置使用时需固定放置在车内某处,不可随意移动,具有一定的局限性。
技术实现要素:
6.目前新型冠状病毒的主要跨国传播方式为海外冷链产品的外包装,因此,对于进口集装箱、冷库、保鲜库等场所进行高效智能的灭菌消毒对于目前来讲有重要意义,为实现船舶舱室、集装箱、冷藏保鲜库等场所的全方位灭菌杀毒,本发明提供了一种全方位智能高效灭菌仪,具有智能高效、安全可靠、灵活便携等优点,可实现所在区域内的全方位智能灭菌,具有重要意义。
7.因为目前的灭菌仪体积大、移动不灵活,不适用于在海关、对舶舱室、集装箱、冷藏保鲜库的灭菌消毒,为解决上述问题,本发明提供了一种全方位智能高效灭菌仪,采用的技术方案为:
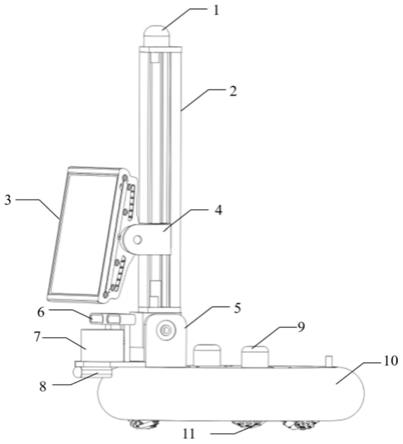
8.一种全方位智能高效灭菌仪,其特征在于,所述灭菌仪包括:灭菌装置和基座装置;所述的灭菌装置包括:升降机构2、紫外灭菌灯组模块3、云台电机模块4、旋转机构5和旋转电机17;所述的基座装置包括:智能基座主体10、轮系11、轮系支架33、驱动模块29、主控模块30和电机32;所述的紫外灭菌灯组模块3通过云台电机模块4滑动连接在升降机构2上;升降机构2通过旋转机构5连接在基座装置上;所述的轮系11通过轮系支架33固定连接在智能基座主体10的下部;驱动模块28置于所述的智能基座主体10的内部;所述的主控模块30发出指令给驱动模块29,驱动模块29根据接收到的指令驱动电机32,驱动电机32带动轮系11运动。
9.进一步,所述的升降机构2还包括:起竖支架12、滑动支架13、丝杆机构14、步进电机支架15和步进电机19;所述的步进电机位于步进电机支架15的内部,所述的步进电机19根据主控模块30发出的指令控制丝杆机构14旋转,丝杆机构12旋转带动滑动支架13沿起竖支架12上下平移。
10.进一步,所述的旋转机构5包括:旋转机构支架16和旋转电机17;所述的旋转机构支架16为两侧壁上有同轴通孔的“凹”字型,所述的旋转电机17位于所述的旋转机构支架的一侧侧壁的外侧,旋转电机 17的输出轴穿过旋转机构支架16侧壁上的通孔,连接在步进电机支架15上。
11.进一步,所述的灭菌仪还包括:两个升降机构接近开关18和一个升降机构限位开关26;所述的两个升降机构接近开关18分别位于起竖支架12的内侧两端,用于限定滑动支架13的平移范围;所述的升降机构限位开关26位于所述的智能基座主体10的上部表面,与所述的旋转机构5的连线穿过所述的智能基座主体10的中心点;用于限定升降机构2的运动距离。
12.进一步,所述的灭菌仪还包括:麦克拉姆轮31;所述的轮系11为麦克拉姆轮31。
13.进一步,所述的基座装置还包括:基座前侧平台25;所述的基座前侧平台25固定在所述的智能基座主体10的顶部边缘,靠近所述的灭菌装置,朝向和所述的灭菌仪消杀方向相同。
14.进一步,所述的灭菌仪还包括:环境监测模块1;所述的环境监测模块1安装在升降机构2的顶端,用于对现场的温湿度情况和病菌微生物含量进行监测,将信息反馈给主控模块30。
15.进一步,所述的灭菌仪还包括:红外感应模块8、避障模块9、深度视觉模块6和激光雷达7;所述的红外感应模块8位于所述的基座前侧平台上25,朝向所述的灭菌仪的正前方;所述的红外感应模块8用于检测突然接近的生命体,当有生命体突然进入红外感应范围内时,红外感应模块8向主控模块30发出应急指令;所述的避障模块9用于预判所述的灭菌仪前进方向上的障碍物,协同主控模块30和驱动模块29 实时调整运行路径;所述的深度视觉模块6和激光雷达7位于所述的基座前侧平台25上,朝向所述的灭菌仪的正前方;所述的激光雷达7协同深度视觉模块6完成灭菌仪运动距离测算和舱室内部环境高精度重建,并且将信息反馈给主控模块30。
16.进一步,所述的升降机构2还包括:云台电机23和云台电机支架24;所述的云台电机支架安装在滑动支架13上,用以固定云台电机模块4;所述的云台电机支架24固定连接在滑动支架13上,用于固定所述的云台电机23;所述的云台电机23可以带动所述的外灯罩21
做俯仰运动。
17.进一步,所述的紫外灭菌灯组模块3还包括:紫外线灭菌灯组(20)、外灯罩21、内灯罩22;所述的紫外线灭菌灯组20采用中心波长为253.7nm的led紫外线灯管或led紫外线灯珠;所述的外灯罩21采用凹透镜或高透射率镜;所述内灯罩采用高反光率灯罩。
18.进一步,所述的深度视觉模块6采用轻客智能科技公司的d1000
‑
ir
‑
120/color型号;所述的激光雷达7采用科力公司的ls
‑
1027de/m03型号;所述的红外感应模块8采用欧姆龙公司的d6t
‑
32l
‑
01a型号;所述的避障模块9采用smartfly公司的vl53l0x型号。
19.本发明的有益效果为:
20.1.本发明采用波长为253.7nm的紫外灭菌灯,对新型冠状病毒具有良好的消杀作用;
21.2.利用升降机构与云台电机支架自由调整紫外灭菌灯组模块的照射高度及角度,整体装置底部采用麦克拉姆轮系,自主控制实现全方向移动,可以有效实现全方位全角度全覆盖的杀菌,且更加灵活机动;
22.3.在灭菌仪前侧位置设置有环境监测模块,该模块输出环境检测结果信号给主控模块。增加该模块和主控模块的连接关系之后,在实际应用中,能够实现实时监测环境变化,进而实现依据不同温湿度条件和病菌含量设定不同的杀菌时间,有效避免资源浪费,提高杀菌效率;
23.4.在灭菌仪前侧位置设置有激光雷达模块和深度视觉模块,激光雷达模块和深度视觉模块给主控模块输出灭菌仪运动距离测算和舱室内部环境高精度重建信号,在实际应用中可实现对灭菌仪所处环境的高精度重建,选择最优化灭菌路径,杀菌更高效精准;
24.5.在灭菌仪前侧位置设置有红外感应模块,该模块在感应到生命体时将紧急停止信号输出至主控模块,并在生命体消失后将重新开启信号输出给主控模块,在实际应用中提高了灭菌仪的安全可靠性;
25.目前新型冠状病毒的主要跨国传播方式为海外冷链产品的外包装,因此,对于进口集装箱、冷库、保鲜库等场所进行高效智能的灭菌消毒对于目前来讲有重要意义,为实现船舶舱室、集装箱、冷藏保鲜库等场所的全方位灭菌杀毒,本发明提供的一种全方位智能高效灭菌仪,具有智能高效、安全可靠、灵活便携的优点,可实现所在区域内的全方位智能灭菌,具有重要意义。
附图说明
26.图1为本发明提出的一种全方位智能高效灭菌仪的主体图;
27.图2为图1的灭菌装置的主体图;
28.图3为图1的升降机构与旋转机构结构示意图;
29.图4为图3的旋转机构结构示意图;
30.图5为图1的灭菌灯组模块和云台电机模块结构示意图;
31.图6为图1的智能基座装置的主体图;
32.图7为图6的内部透视图;
33.图8为图6的仰视图;
34.图9为图1的非工作状态示意图;
35.图10为图1的工作流程图。
具体实施方式
36.实施方式一、结合图1
‑
3和7
‑
10说明本实施方式,本实施方式提供了一种全方位智能高效灭菌仪,其特征在于,所述灭菌仪包括:灭菌装置和基座装置;所述的灭菌装置包括:升降机构2、紫外灭菌灯组模块3、云台电机模块4、旋转机构5和旋转电机17;所述的基座装置包括:智能基座主体10、轮系11、轮系支架33、驱动模块29、主控模块30和电机32;所述的紫外灭菌灯组模块3通过云台电机模块4滑动连接在升降机构2上;升降机构2通过旋转机构5连接在基座装置上;所述的轮系11通过轮系支架33固定连接在智能基座主体10的下部;驱动模块28置于所述的智能基座主体10的内部;所述的主控模块30 发出指令给驱动模块29,驱动模块29根据接收到的指令驱动电机32,驱动电机32带动轮系11运动。所述的灭菌仪在工作状态时,灭菌装置起竖支架12竖起,在非工作状态时,灭菌系统平卧。图10为本发明的工作流程图。
37.本实施方式的有益之处在于:利用升降机构与云台电机支架自由调整紫外灭菌灯组模块的照射高度及角度;所述轮系能够实现所述灭菌仪的自主移动;
38.本实施方式的有益之处在于:灭菌仪不工作的时候所述的灭菌装置会向所述的智能基座主体的方向收起,占用空间变小,便于储存和携带。
39.实施方式二、结合图3
‑
4说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的升降机构2还包括:起竖支架12、滑动支架13、丝杆机构14、步进电机支架 15和步进电机19;所述的步进电机位于步进电机支架15的内部,所述的步进电机19根据主控模块30发出的指令控制丝杆机构14旋转,丝杆机构12旋转带动滑动支架13沿起竖支架12上下平移。
40.本实施方式的有益之处在于:升降机构采用了丝杆机构配合起竖支架,让紫外灭菌灯组模块的移动更为精准且稳定;采用了旋转电机连接步进电机支架,步进电机支架上安装步进电机,步进电机上再安装升降机构,能够让升降机构的移动和旋转更加灵活,让灭菌仪能够适应更多的场景,消杀更为全面。
41.实施方式三、结合图4说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的旋转机构5包括:旋转机构支架16和旋转电机17;所述的旋转机构支架16为两侧壁上有同轴通孔的“凹”字型,所述的旋转电机17位于所述的旋转机构支架的一侧侧壁的外侧,旋转电机17的输出轴穿过旋转机构支架16侧壁上的通孔,连接在步进电机支架15上。
42.本实施方式的有益之处在于:采用两侧壁上有同轴通孔的“凹”字型结构的旋转机构支架和位于所述的旋转机构支架的一侧侧壁的外侧的旋转电机,旋转电机的输出轴穿过旋转机构支架侧壁上的通孔,连接在步进电机支架上,这样的设计可以让所述的升降机构以所述的旋转机构为轴带动灭菌系统平卧,让灭菌仪能够适应更多的场景,消杀更为全面。
43.实施方式四、结合图3和图6说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的灭菌仪还包括:两个升降机构接近开关18和一个升降机构限位开关26;所述的两个升降机构接近开关18分别位于起竖支架12的内侧两端,用于限定滑动支架13的平移范围;所述的升降机构限位开关26位于所述的智能基
座主体10的上部表面,与所述的旋转机构5的连线穿过所述的智能基座主体10的中心点;用于限定升降机构2的运动距离。
44.本实施方式的有益之处在于:加入了升降机构接近开关18,保证了紫外灭菌灯组模块在移动至升降机构的两端时不会因为碰撞产生振动导致角度发生偏移,并且加入了基座接近开关,保证了升降机构在做扇形运动的过程中不会因为运动角度过大而发生碰撞导致紫外灭菌灯组的角度发生偏移,增加了仪器的使用寿命。
45.实施方式五、结合图7
‑
8说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的灭菌仪还包括:麦克拉姆轮31;所述的轮系11为麦克拉姆轮31。
46.本实施方式的有益之处在于,轮系采用了麦克拉姆轮,让灭菌仪可以向任意方向移动而不改变自身朝向角度,增强了灭菌仪的机动性和灵活性,保证稳定的同时能够适应更多的环境。
47.实施方式六、结合图6说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的基座装置还包括:基座前侧平台25;所述的基座前侧平台25固定在所述的智能基座主体10的顶部边缘,靠近所述的灭菌装置,朝向和所述的灭菌仪消杀方向相同。
48.本实施方式的有益之处在于:增加了基座前侧平台,可以用其承载深度视觉模块、激光雷达和红外感应模块,模块之间的不会因为距离过近而影响散热,并且便于随时拆卸更换或检修。
49.实施方式七、结合图1说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的灭菌仪还包括:环境监测模块1;所述的环境监测模块1安装在升降机构2的顶端,用于对现场的温湿度情况和病菌微生物含量进行监测,将信息反馈给主控模块30。
50.本实施方式的有益之处在于:在灭菌仪前侧位置设置有环境监测模块,该模块输出环境检测结果信号给主控模块。增加该模块和主控模块的连接关系之后,在实际应用中,能够实现实时监测环境变化,进而实现依据不同温湿度条件和病菌含量设定不同的杀菌时间,有效避免资源浪费,提高杀菌效率;
51.实施方式八、结合图1和图6说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的灭菌仪还包括:红外感应模块8、避障模块9、深度视觉模块6和激光雷达7;所述的红外感应模块8位于所述的基座前侧平台上25,朝向所述的灭菌仪的正前方;所述的红外感应模块8用于检测突然接近的生命体,当有生命体突然进入红外感应范围内时,红外感应模块8向主控模块30发出应急指令;所述的避障模块9用于预判所述的灭菌仪前进方向上的障碍物,协同主控模块30和驱动模块29实时调整运行路径;所述的深度视觉模块6和激光雷达7位于所述的基座前侧平台25上,朝向所述的灭菌仪的正前方;所述的激光雷达7协同深度视觉模块6完成灭菌仪运动距离测算和舱室内部环境高精度重建,并且将信息反馈给主控模块30。
52.本实施方式的有益之处在于:在灭菌仪前侧位置设置有激光雷达模块和深度视觉模块,激光雷达模块和深度视觉模块给主控模块输出灭菌仪运动距离测算和舱室内部环境高精度重建信号,在实际应用中可实现对灭菌仪所处环境的高精度重建,选择最优化灭菌
路径,杀菌更高效精准;在灭菌仪前侧位置设置有红外感应模块,该模块在感应到生命体时将紧急停止信号输出至主控模块,并在生命体消失后将重新开启信号输出给主控模块,在实际应用中提高了灭菌仪的安全可靠性;
53.实施方式九、结合图5说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的升降机构2还包括:云台电机23和云台电机支架24;所述的云台电机支架安装在滑动支架13上,用以固定云台电机模块4;所述的云台电机支架24固定连接在滑动支架13上,用于固定所述的云台电机23;所述的云台电机23可以带动所述的外灯罩21做俯仰运动。
54.本实施方式的有益之处在于:加入了云台电机支架,固定云台电机模块,提升了装置的稳定性;通过云台电机支架固定云台电机,云台电机旋转可以带动所述的外灯罩做俯仰运动,增大消杀范围。
55.实施方式十、结合图5说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的紫外灭菌灯组模块3还包括:紫外线灭菌灯组(20)、外灯罩21、内灯罩22;所述的紫外线灭菌灯组20采用中心波长为253.7nm的led紫外线灯管或led紫外线灯珠;所述的外灯罩21 采用凹透镜或高透射率镜;所述内灯罩采用高反光率灯罩。
56.本实施方式的有益之处在于:紫外灭菌灯组模块采用中心波长为253.7nm的紫外线,对新型冠状病毒具有良好的消杀作用。
57.实施方式十一、结合图1和图6说明本实施方式,本实施方式是对实施方式一提供的一种全方位智能高效灭菌仪的进一步限定,所述的深度视觉模块6采用轻客智能科技公司的d1000
‑
ir
‑
120/color型号;所述的激光雷达7采用科力公司的ls
‑
1027de/m03型号;所述的红外感应模块8采用欧姆龙公司的 d6t
‑
32l
‑
01a型号;所述的避障模块9采用smartfly公司的vl53l0x型号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1