一种坐卧式下肢运动训练机器人
1.本发明涉及机器人、医疗康复及医疗器械等技术领域,具体地说,是一种面向下肢运动功能障碍患者和长期卧床患者的坐卧式下肢运动训练机器人。
背景技术:
2.下肢运动功能障碍常见于脑卒中、脊髓损伤、骨/关节创伤、肌无力等患者。以脑卒中患者为例,针对脑卒中患者的运动功能康复是急性期后的日常看护重点,高频次、科学的康复运动训练可以帮助患者有效的恢复运动功能,实现生活自理,改善患者生活质量,降低家庭和社会负担。其他长期卧床患者和久坐轮椅患者也需要进行充分的下肢运动训练以防止肌肉萎缩和关节僵硬。
3.目前,针对康复初期患者或长期卧床患者下肢的运动训练,主要是依靠治疗师或患者家属的运动辅助,帮助患者进行屈腿、起立、行走等运动能力训练,甚至需要多人同时辅助,由于治疗师数量太少,而且辅助运动的劳动强度太大,常常存在训练频次不足、训练一致性差等问题,使得运动训练效果难以尽如人意。近年来,研究人员提出了将机器人应用于运动训练的方案,以部分代替治疗师及患者家属在运动辅助过程中的重复性繁重体力劳动。
4.采用机器人进行辅助训练时,人与机器人会发生频繁或持续的接触与交互,这对机器人的操作柔顺性、安全性、穿戴舒适性等都提出了更高的要求。
5.现有的坐卧式下肢运动训练机器人一般都是采用减速机、带轮等较为刚性的传动部件,座椅固定在机架上,与下肢交互作用的连杆机构一端固定安装在座椅上,工作过程中该连杆机构发挥着外骨骼的作用,需要将大腿和小腿同时绑缚在外骨骼上。现有的坐卧式下肢运动训练机器人通常会存在以下几个方面的问题:一是无法适应不同腿长、髋宽患者的坐卧与训练需求;二是患者髋、膝关节与外骨骼相应关节的旋转轴必须始终同时保持同心,否则会因为二者运动干涉而引起舒适感降低,甚至造成二次损伤;三是人体下肢一般被绑缚在外骨骼内测,因此人体下肢与外骨骼的运动在不同的平面上,二者之间容易出现位置误差,从而给外骨骼的运动控制带来更多干扰。
技术实现要素:
6.为了克服已有坐卧式下肢运动训练机器人的体型适应性较差、交互舒适性较差的不足,本发明提供了一种坐卧式下肢运动训练机器人,旨在提高坐卧式下肢运动训练机器人的体型适应性、交互舒适性。
7.本发明解决其技术问题所采用的技术方案是:
8.一种坐卧式下肢运动训练机器人,包括髋宽可调双腿外骨骼和自适应位置调节座椅,所述髋宽可调双腿外骨骼安装在自适应位置调节座椅上;所述髋宽可调双腿外骨骼包括左腿外骨骼、右腿外骨骼和髋宽可调组件;所述左腿外骨骼、右腿外骨骼分别对称安装在髋宽可调组件左右两侧。
9.进一步,所述髋宽可调组件包括髋宽移动导轨、髋宽调节滑块组和髋宽调距螺杆,所述髋宽调节滑块组可在髋宽移动导轨上滑动,所述左腿外骨骼、右腿外骨骼分别安装在髋宽调节滑块组的不同髋宽调节滑块上,所述髋宽调距螺杆以中点为界螺纹方向相反,通过驱动髋宽调距螺杆旋转可推动左腿外骨骼、右腿外骨骼做相对运动实现髋宽调节。本方案中,所述髋宽调节滑块组包括至少两块髋宽调节滑块,例如可以是四块,所述左腿外骨骼、右腿外骨骼分别安装在不同的两块髋宽调节滑块;当然,也可以是其他数量。
10.再进一步,所述自适应位置调节座椅包括座板、座板移动导轨和座板调节滑块,所述座板调节滑块可在座板移动导轨上自由滑动,所述座板固定安装在座板调节滑块上,可随着座板调节滑块在座板移动导轨上作无约束的前后移动。
11.更进一步,所述左、右腿外骨骼都包括大腿杆件、小腿杆件、髋关节作动器和膝关节作动器,所述大腿杆件与髋关节作动器联动,摆动于自适应位置调节座椅两侧且与人体大腿无绑缚,所述膝关节作动器垂直安装在大腿杆件末端,随大腿杆件摆动于自适应位置调节座椅前方,横置于人腿腘窝下面且施力于人腿腘窝部位,所述小腿杆件固定安装在膝关节作动器上,小腿杆件与膝关节作动器的旋转输出联动,随膝关节作动器摆动于自适应位置调节座椅前方,竖置于人体小腿下/后面并施力于小腿腓肠肌、胫骨和髌骨,所述左、右腿外骨骼的膝关节作动器之间、小腿杆件之间的间距与人体正常行走时的腿间距相同且互不干涉。
12.优选的,所述髋宽可调组件还包括调宽组件框架、调宽组件轴承座、髋宽调距手轮、髋宽调距螺杆支撑架和螺纹衬套,所述髋宽移动导轨安装在调宽组件框架上,所述髋宽调距螺杆一端通过调宽组件轴承座安装于调宽组件框架上,所述髋宽调距手轮安装于髋宽调距螺杆另一端,所述螺纹衬套安装在髋宽调距螺杆支撑架上,所述髋宽调距螺杆与螺纹衬套螺纹配合,所述髋宽调距螺杆支撑架与髋关节作动器固连,所述髋关节作动器固定安装在髋宽调节滑块上。本方案,通过转动髋宽调距手轮,可以带动髋宽调节滑块做相对运动,从而推动髋关节作动器产生相对运动。当然,也可以采用其他髋宽调节方式。
13.本发明中,转动所述髋宽调距手轮可调节双腿外骨骼之间的宽度以适应不同体型人体,将人体小腿绑缚于小腿杆件上,通过控制所述髋、膝关节作动器以实现人体坐卧姿态下的下肢运动训练。
14.再进一步,所述自适应位置调节座椅还包括座椅机架、座板定位滑块,所述座板移动导轨平行安装在座椅机架上,所述座板定位滑块可在座板移动导轨上自由滑动,所述座板固定安装在座板定位滑块上,可随着座板调节滑块与座板定位滑块在座板移动导轨上前后移动,所述座板定位滑块安装在座板移动导轨前部,通过旋转座板定位滑块上的锁紧把手可将座板固定在设定的位置。
15.更进一步,所述髋关节作动器包括髋关节作动器安装基座组件、髋关节电机及减速器组件、髋关节减速同步带、髋关节小带轮、髋关节大带轮、髋关节扭矩传感器、连接法兰、髋关节同步带、髋关节下端带轮、髋关节上端带轮、髋关节连杆基座、髋关节轴承座、髋关节限位杆固定块、髋关节限位螺杆和大腿杆件转轴,所述髋关节电机及减速器组件输出轴与所述髋关节小带轮通过键连接,所述髋关节减速同步带将髋关节电机及减速器输出转矩传递到髋关节大带轮,所述髋关节大带轮与连接法兰通过键连接,所述髋关节扭矩传感器一端与连接法兰固连,另一端通过联轴器与带轮连接轴连接,所述带轮连接轴经由髋关
节轴承座与髋关节下端带轮通过键连接,所述髋关节同步带将经髋关节减速同步带增大后的转矩传递到髋关节上端带轮,所述髋关节上端带轮与大腿杆件转轴通过键连接,从而驱动大腿杆件转动,实现人体大腿屈伸运动;所述髋关节轴承座安装在髋关节连杆基座上,用于支撑大腿杆件转轴做相对转动,所述髋关节限位杆固定块安装在髋关节连杆基座上,所述髋关节限位螺杆可从下向上旋入髋关节限位杆固定块的螺孔内,通过露出髋关节限位杆固定块上方的高度来限制大腿杆件转动范围,防止转动角度超过人体适合的屈伸角度,从而保证了人体的安全。
16.优选的,所述左腿外骨骼、右腿外骨骼都还包括大腿杆件外罩,所述大腿杆件外罩与大腿杆件固连,用于将人体与大腿杆件上的刚性传动部件隔开以防止肢体接触发生意外。
17.优选的,所述膝关节作动器包括膝关节电机及减速器组件、膝关节电机固定法兰、膝关节电机连接法兰、膝关节扭矩传感器连接法兰、膝关节扭矩传感器、膝关节作动器端盖、膝关节作动器传动支架、膝关节作动器传动套筒、髋膝连接法兰、轴承和膝关节电机安装套筒,所述膝关节电机及减速器组件通过膝关节电机固定法兰固定安装在膝关节电机安装套筒上,所述膝关节电机及减速器输出轴通过膝关节电机连接法兰与膝关节扭矩传感器一端相连,所述膝关节扭矩传感器另一端与膝关节作动器端盖固连,所述膝关节作动器传动套筒一端与膝关节作动器传动支架固连,而另一端通过轴承连接在髋膝连接法兰上,所述髋膝连接法兰安装在大腿杆件末端,所述膝关节电机安装套筒与髋膝连接法兰固连,所述轴承外圈与膝关节作动器传动套筒内壁固定,所述轴承内圈与髋膝连接法兰固定,实现膝关节作动器输出轴的正常输出。本方案中,膝关节电机及减速器输出转矩经由膝关节扭矩传感器与膝关节作动器传动支架、膝关节作动器传动套筒传递至小腿杆件,进而带动小腿杆件转动,实现人体小腿屈伸运动。
18.进一步,所述小腿杆件包括上托架、下托架、膝关节护套、护套固定环、u型腿垫和小腿绑带,所述上托架与膝关节作动器传动套筒固定连接,所述u型腿垫固定在上托架上,所述膝关节护套固定于护套固定环上,所述护套固定环套装在膝关节作动器传动套筒外部,可在膝关节作动器传动套筒外部自由滑动,以适应不同的位姿,所述下托架嵌套安装于上托架两侧槽内,可沿着槽内上下滑动以适应不同腿长的人体,并通过螺母固定,所述小腿绑带用于将小腿绑缚在u型腿垫上。
19.优选的,所述小腿杆件还包括脚踏板,所述脚踏板与小腿杆件的下端通过承重轴连接,可绕承重轴在设定角度范围内翻转。
20.进一步,所述自适应位置调节座椅还包括靠背、支撑杆、支撑杆衬套、蜗轮蜗杆减速器和靠背电机,所述靠背与座板之间通过铰链连接,由支撑杆支撑,所述支撑杆共两根,左右对称分置于蜗轮蜗杆减速器两侧,一面为齿面,另一面为光杆,上端与靠背固连,下端嵌插于所述支撑杆衬套孔中,所述支撑杆衬套对称分置于蜗轮蜗杆减速器的蜗杆两侧,内部各自包含一个齿轮,所述齿轮通过键连接于蜗杆上并与支撑杆上的齿面啮合,通过控制靠背电机驱动蜗轮蜗杆减速器可调节靠背倚靠角度。
21.优选的,所述自适应位置调节座椅为可移动式座椅,四个脚轮分别安装在座椅机架底端四个角,用于移动机器人。
22.本发明的技术构思为:自适应位置调节座椅的两根座板移动导轨平行安装在座椅
机架上,该导轨为光杆,两个座板调节滑块与两个座板定位滑块可在导轨上自由滑移,座板固定安装在座板调节滑块与座板定位滑块上,可以随座板调节滑块与座板定位滑块在导轨上前后移动,座板定位滑块上带有锁紧把手,旋转锁紧把手可将座板固定在适宜的位置。靠背与座板之间通过铰链链接,靠背由支撑杆调节斜靠的角度。靠背电机驱动蜗轮蜗杆减速器,蜗杆的两端各套装了一个齿轮,蜗杆与齿轮采用键连接。支撑杆的部分区域为齿面,其他区域为光杆,支撑杆的齿条与支撑杆衬套内部齿轮啮合,因此通过控制靠背电机即可调节靠背的斜靠角度。
23.髋宽可调双腿外骨骼的髋宽调距螺杆以中点为界,两侧的螺纹旋转方向相反,旋转髋宽调距手轮时可以推动髋宽调节滑块组的不同髋宽调节滑块做相对运动,髋关节作动器固定安装在髋宽调节滑块上,髋关节作动器包括髋关节电机和髋关节减速器,髋关节电机及减速器都固定安装在髋关节作动器安装基座组件上,大腿杆件旋转轴端的两个轴承座安装在髋关节连杆基座上,髋关节连杆基座组件安装在髋关节作动器安装基座组件上,因此整个髋宽可调双腿外骨骼是通过髋宽可调组件装配在座椅机架上的,通过转动髋宽调距手轮可以调节双腿外骨骼的髋距,适应不同体型人体的坐卧需求,而且可以通过调小髋距以方便机器人的搬运。髋关节电机及减速器组件通过带轮传动,并通过扭矩传感器、扭矩传感器外罩将输出扭矩传递至大腿杆件转轴,进而驱动大腿杆件摆动。大腿杆件对称置于座椅两侧,即大腿杆件是位于人体大腿外侧的。大腿杆件外罩用于将整个大腿杆件及其传动部件遮挡起来并防止肢体与传动部件发生意外接触。
24.膝关节电机、膝关节扭矩传感器均安装在膝关节作动器传动支架及膝关节作动器传动套筒内部,膝关节作动器安装在大腿杆件末端,与大腿杆件末端安装通孔同轴,膝关节作动器传动套筒与小腿杆件上托架连接,可承载小腿杆件产生的扭矩和弯矩。小腿杆件是置于座椅正前方的,即人体膝关节后侧腘窝位于小腿杆件摆动轴线的前/上方,也位于膝关节作动器的前/上方,整个小腿杆件位于人体小腿下/后面,小腿杆件的下托架嵌入式安装在上托架的侧边槽里,下托架与上托架有一定的重叠长度,通过锁紧螺母进行锁紧以防止自由滑动,下托架与上托架的重叠长度即是为不同腿长人体预留的调节长度,u型腿垫安装于上托架上,用于提高小腿与外骨骼接触交互时的舒适性并起到定位的作用。脚踏板安装在下托架的末端并且可在一定的角度范围内俯仰翻转。在下肢与脚背位置分别用绑带进行绑缚,在膝盖部位采用中空的膝关节护套进行绑缚和定位。
25.本发明的有益效果主要表现在:
26.1、该坐卧式下肢运动训练机器人具有髋宽可调的双腿外骨骼,能够适应不用体型人体的坐卧需求,而且也能通过缩小髋宽而方便转运、进出居家环境中的普通门户;
27.2、小腿杆件置于人体小腿下面或后面,膝关节作动器在小腿腘窝的下方,因此髋关节运动时人机交互力的施力部位是膝关节腘窝和膑骨四周,膝关节运动时人机交互力的施力部位是小腿腓肠肌和胫骨,相较于侧绑,人体具有更舒适的施力体验,也能使外骨骼与人体下肢保持更小的姿态误差,即使存在人体髋关节与外骨骼髋关节不同轴的问题,也不会因为大腿与大腿杆件之间的侧绑而产生干涉;
28.3、座板可以随座板调节滑块在座板移动导轨上前后移动,该特征可以使人体髋关节位置随大腿杆件的摆动而前后移动,从而避免因人体大腿与外骨骼杆件长度不一致而产生干涉,也可以避免因人体髋膝关节与外骨骼髋膝关节未能始终同时保持同轴而产生干
涉,提高了使用的舒适性和安全性。
附图说明
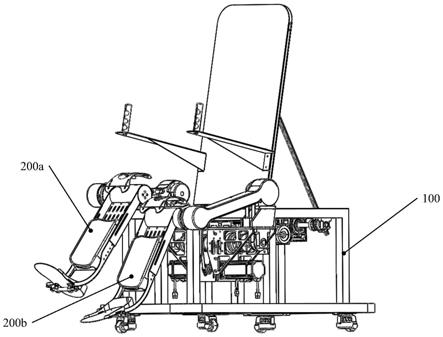
29.图1是本发明的总体结构示意图。
30.图2是本发明的座椅机架结构示意图。
31.图3是图2中座椅机架底部结构示意图。
32.图4是本发明的髋宽可调双腿外骨骼前视结构示意图。
33.图5是本发明的髋宽可调双腿外骨骼后视结构示意图。
34.图6是本发明的髋关节作动器结构示意图。
35.图7是本发明的膝关节作动器结构示意图。
36.图8是本发明的小腿杆件与膝关节作动器结构示意图。
37.图9是本发明的髋宽调节组件正面结构示意图。
38.图10是本发明的髋宽调节组件背面结构示意图。
39.图中,100
‑
自适应位置调节座椅,200a
‑
右腿外骨骼,200b
‑
左腿外骨骼,101
‑
座椅机架,102
‑
支撑杆,103
‑
靠背,104
‑
扶手,105
‑
座板,106
‑
脚轮,107
‑
支撑杆衬套,108
‑
蜗轮蜗杆减速器,109
‑
靠背电机,110
‑
座板移动导轨,111
‑
座板调节滑块,112
‑
座板定位滑块,201
‑
小腿杆件,202
‑
髋关节作动器,203
‑
大腿杆件,204
‑
大腿杆件外罩,205
‑
膝关节作动器,206
‑
髋宽调节组件,301
‑
髋关节电机及减速器组件,302
‑
髋关节小带轮,302
‑
髋关节减速同步带,304
‑
髋关节大带轮,305
‑
髋关节扭矩传感器,306
‑
连接法兰,307
‑
髋关节下端带轮,308
‑
髋关节上端带轮,309
‑
髋关节同步带,310
‑
髋关节连杆基座,311
‑
髋关节轴承座,312
‑
髋关节限位杆固定块,313
‑
髋关节限位螺杆,314
‑
大腿杆件连接轴,315
‑
髋关节作动器安装基座组件,401
‑
膝关节作动器传动支架,402
‑
膝关节作动器端盖,403
‑
膝关节扭矩传感器,404
‑
膝关节扭矩传感器连接法兰,405
‑
膝关节电机连接法兰,406
‑
膝关节电机固定法兰,407
‑
膝关节电机及减速器组件,408
‑
轴承,409
‑
髋膝连接法兰,410
‑
膝关节电机安装套筒,411
‑
膝关节作动器传动套筒,501
‑
下托架,502
‑
上托架,503
‑
膝关节护套,504
‑
护套固定环,505
‑
u型腿垫,506
‑
脚踏板,507
‑
承重轴,601
‑
髋宽移动导轨,602
‑
髋宽调距手轮,603
‑
髋宽调节滑块,604
‑
螺纹衬套,605
‑
髋宽调距螺杆,606
‑
髋宽调距螺杆支撑架,607
‑
调宽组件框架,608
‑
调宽组件轴承座。
具体实施方式
40.下面结合附图对本发明作进一步描述。
41.参照图1,一种坐卧式下肢运动训练康复机器人,包括自适应位置调节座椅100,左腿外骨骼200a和右腿外骨骼200b分别对称安装在自适应位置调节座椅100左右两侧。
42.参照图2及图3,自适应位置调节座椅100包括座椅机架101、支撑杆102、靠背103、扶手104、座板105、座板移动导轨110、座板调节滑块111、座板定位滑块112、支撑杆衬套107、蜗轮蜗杆减速器108、靠背电机109和脚轮106,扶手104固定安装在靠背103上,座板移动导轨110平行安装在座椅机架101上,座板调节滑块111与座板定位滑块112可在座板移动导轨110上自由滑动,座板105与座板调节滑块111、座板定位滑块112通过螺钉固连,可以随着座板调节滑块111与座板定位滑块112在座板移动导轨110上前后移动,通过旋转座板定
位滑块112上的锁紧把手可以将座板105固定在合适的位置。靠背103与座板105之间通过铰链合页连接,支撑杆102共两根,左右对称安装于蜗轮蜗杆减速器108两侧,每根支撑杆一面为齿面,另一面为光杆,上端与靠背固连,下端齿面与支撑杆衬套107内部齿轮啮合,支撑杆衬套107左右对称安装于蜗轮蜗杆减速器108两侧,通过控制靠背电机109驱动蜗轮蜗杆减速器108即可调节靠背倚靠角度,满足人体以坐姿或卧姿进行康复训练。自适应位置调节座椅100为可移动式座椅,四个脚轮106分别安装在座椅机架101底端四个角,用于移动机器人。
43.参照图4、图5、图9及图10,髋宽可调双腿外骨骼包括左腿外骨骼200a、右腿外骨骼200b和髋宽调节组件206,左腿外骨骼2a、右腿外骨骼2b分别对称安装在髋宽可调组件206左右两侧,无结构差异。髋宽可调双腿外骨骼包括小腿杆件201、髋关节作动器202、大腿杆件203、大腿杆件外罩204和膝关节作动器205,所述大腿杆件203与髋关节作动器202联动,摆动于自适应位置调节座椅两侧且与人体大腿无绑缚;所述膝关节作动器205垂直安装在大腿杆件203末端,随大腿杆件摆动于自适应位置调节座椅前方,横置于人腿腘窝下面且施力于人腿腘窝部位;所述小腿杆件201固定安装在膝关节作动器205上,小腿杆件201与膝关节作动器205的旋转输出联动,随膝关节作动器摆动于自适应位置调节座椅前方,竖置于人体小腿下/后面并施力于小腿腓肠肌、胫骨和髌骨,所述左、右腿外骨骼的膝关节作动器之间、小腿杆件之间的间距与人体正常行走时的腿间距相同且互不干涉。所述大腿杆件外罩204与大腿杆件203固连,所述大腿杆件外罩204用于将人体与大腿杆件上的刚性传动部件隔开以防止肢体接触发生意外。
44.所述髋宽调节组件206包括髋宽移动导轨601、髋宽调距手轮602、髋宽调节滑块组、螺纹衬套604、髋宽调距螺杆605、髋宽调距螺杆支撑架606、调宽组件框架607和调宽组件轴承座608,髋宽移动导轨601安装在座椅机架101上,髋宽调节滑块组安装在髋宽移动导轨601上并且可在导轨上滑动,所述左腿外骨骼200a、右腿外骨骼200b分别安装在髋宽调节滑块组的不同髋宽调节滑块603上,髋宽调距螺杆通过调宽组件轴承座608安装在调宽组件框架607上,髋宽调距手轮602与髋宽调距螺杆605连接,置于座椅机架101左侧,通过转动髋宽调距手轮602,可以推动髋宽调节滑块603做相对运动。螺纹衬套604通过螺钉固连在髋宽调距螺杆支撑架606上,髋宽调距螺杆支撑架606与髋关节作动器202固连,髋宽调距螺杆605与螺纹衬套604内部螺纹配合,髋宽调距螺杆605以中点为界,左右两侧螺纹旋向相反,通过转动髋宽调距手轮602,可以推动双腿髋关节作动器做相对运动,从而调节双腿外骨骼的髋距。本方案中,所述髋宽调节滑块组包括至少两块髋宽调节滑块,例如可以是四块,所述左腿外骨骼、右腿外骨骼分别安装在不同的两块髋宽调节滑块;当然,也可以是其他数量。
45.参照图6,髋关节作动器202包括髋关节电机及减速器组件301、髋关节小带轮302、髋关节减速同步带303、髋关节大带轮304、膝关节扭矩传感器305、连接法兰306、髋关节下端带轮307、髋关节上端带轮308、髋关节同步带309、髋关节连杆基座310、髋关节轴承座311、髋关节限位杆固定块312、髋关节限位螺杆313、大腿杆件连接轴314和髋关节作动器安装基座组件315,髋关节电机及减速器组件301通过螺钉安装在髋关节作动器安装基座组件315上,髋关节电机及减速器组件输出轴与髋关节小带轮302通过键连接,髋关节减速同步带303将髋关节电机输出转矩传递到髋关节大带轮304,膝关节扭矩传感器305一端与髋关
节大带轮固连,另一端与连接法兰306固连,连接法兰306通过联轴器与髋关节下端带轮307相连,髋关节同步带309将经髋关节减速同步带增大后的转矩传递到髋关节上端带轮308,髋关节上端带轮308与大腿杆件转轴314通过键连接,两个髋关节轴承座311安装在髋关节连杆基座310上,用以支撑大腿杆件转轴314进行相对转动,髋关节限位杆固定块312安装在髋关节连杆基座310上,髋关节限位螺杆313与髋关节连杆基座310螺纹配合,用于限制大腿杆件转动角度,防止转动角度超过人体适合的屈伸角度,充分保证人体的安全。
46.参照图7,膝关节作动器205包括膝关节作动器传动支架401、膝关节作动器端盖402、膝关节扭矩传感器403、膝关节扭矩传感器连接法兰404、膝关节电机连接法兰405、膝关节电机固定法兰406、膝关节电机及减速器组件407、轴承408、髋膝连接法兰409、膝关节电机安装套筒410和膝关节作动器传动套筒411,膝关节电机及减速器组件407固定安装在膝关节电机安装套筒410上,膝关节电机及减速器输出轴与膝关节电机连接法兰405通过键连接,膝关节扭矩传感器403一端经由膝关节扭矩传感器连接法兰404与膝关节电机连接法兰405通过螺钉固连,另一端与膝关节作动器端盖402固连,膝关节作动器传动套筒411一端与膝关节作动器传动支架401固连,另一端通过轴承装配在髋膝连接法兰409上,髋膝连接法兰409可安装在大腿杆件211末端,膝关节作动器传动套筒411内部与轴承408外圈固定,轴承408内圈固定在髋膝连接法兰409上。膝关节电机及减速器输出转矩经由膝关节扭矩传感器403与膝关节作动器传动支架401、膝关节作动器传动套筒411传递至小腿杆件201,进而带动小腿杆件201转动,实现人体小腿屈伸运动。
47.参照图8,小腿杆件201包括下托架501、上托架502、膝关节护套503、护套固定环504、u型腿垫505、小腿绑带、脚踏板506和承重轴507,护套固定环503套装在膝关节作动器传动套筒411外周,可在膝关节作动器传动套筒411外周上自由滑动,膝关节护套503通过弹性绑带固定于护套固定环504上,上托架502与膝关节作动器204的传动套筒固定连接,u型腿垫505固定于上托架502上,下托架501嵌套安装于上托架502两侧槽内,可沿着槽上下滑动以适应不同腿长的人体,并通过螺母固定,所述小腿绑带用于将小腿绑缚在u型腿垫505上。使用时可将人体膝关节通过膝关节护套504绑缚在小腿杆件的上托架502上,绑缚位置位于膝关节作动器205的前方或上方,腘窝紧贴膝关节作动器205,小腿置于u型腿垫505上,通过绑带绑缚。人体脚踏板506安装在下托架501的承重轴507上,可绕承重轴507在一定角度范围内翻转,人体可将双脚放置在脚踏板506上,通过踏板绑带进行绑缚。
48.本实施例的工作过程是:使用该坐卧式下肢运动训练机器人进行下肢训练时,按照以下的步骤进行操作:1)测量人体的髋宽,然后旋转髋宽调距手轮将双腿外骨骼调整到合适的宽度;2)调直座椅靠背,将座板手动推到最后面并锁定座板定位滑块锁紧把手将座板固定;3)人体坐上座板并适当调整在座位上的深度,使膝盖腘窝部位与膝关节作动器传动套筒良好接触;4)调松锁紧螺母使小腿杆件的上托架与下托架可以自由滑动,调节上托架与下托架的重叠长度使双脚正好放置在脚踏板上并调紧锁紧螺母;5)依次用踏板绑带、小腿绑带和膝关节护套将下肢与外骨骼绑缚至不能自由分离为止;6)调节靠背斜度至人体坐卧舒适的角度;7)松动座板定位滑块上的锁紧把手释放座板使其可以自由移动,然后启动机器人并开始进行康复运动训练。
49.使用该坐卧式下肢运动训练机器人可以进行双腿往复式步态训练、单腿的往复式运动训练以及小腿膝关节屈伸运动训练。训练过程中可分别采用被动训练策略和主动训练
策略以及主被动混合训练策略,通过外骨骼膝关节、髋关节处的扭矩传感器可以获知人腿与外骨骼之间的交互力矩,通过编码器可以获知上下杆的位姿。
50.本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1