测定装置、测定方法以及存储介质与流程
1.本发明涉及测定装置、测定方法以及存储介质。
背景技术:
2.已知有如下测定装置:检测正跑步的用户进行特定的动作的定时,根据检测到的该定时来取得与用户的跑步方式有关的信息。例如,日本特开2017-169837号公报公开了一种测定装置,其检测正跑步的用户的脚接触地面的着地定时和正跑步的用户的脚离开地面的离地定时,根据检测到的着地定时以及离地定时来计算接地时间。
3.发明要解决的课题
4.专利文献1所记载的测定装置有时将与正跑步的用户的脚接触到地面的实际的定时不同的定时错误地检测为着地定时,或者将与正跑步的用户的脚从地面离开的实际的定时不同的定时错误地检测为离地定时。在这样的情况下,专利文献1所记载的测定装置有可能根据错误地检测出的着地定时以及离地定时,将与实际的接地时间不同的时间误计算为接地时间。
技术实现要素:
5.本发明是鉴于上述情况而完成的,其目的在于,提供能够提高对象者进行移动中的对象动作时的定时即对象定时的检测精度的测定装置、测定方法以及存储介质。
6.用于解决课题的手段
7.为了实现上述目的,本发明所涉及的测定装置,其特征在于,具备:加速度数据取得单元,其取得表示对象者通过进行移动动作而移动时的对象者的加速度的随时间推移的加速度数据;以及定时检测单元,其根据所述加速度数据所示的检测对象方向上的对象者的加速度的随时间推移、和表示被实验者进行所述移动动作中的对象动作时的被实验者的加速度的随时间推移的基准数据,来检测对象者进行所述对象动作时的定时即对象定时,所述定时检测单元执行以下操作:在所述移动动作是第一移动动作的情况下,使用第一检测方法来检测所述对象定时,在所述移动动作是与所述第一移动动作不同的第二移动动作的情况下,使用与所述第一检测方法不同的第二检测方法来检测所述对象定时,在所述定时检测单元使用所述第一检测方法检测所述对象定时的情况下和在所述定时检测单元使用所述第二检测方法检测所述对象定时的情况下,所述检测对象方向和所述基准数据中的至少一方不同。
8.发明效果
9.根据本发明,能够提高对象者进行移动中的对象动作时的定时即对象定时的检测精度。
附图说明
10.图1是表示本发明的实施方式所涉及的测定系统的整体结构的图。
11.图2是表示本发明的实施方式所涉及的检测装置的物理结构的图。
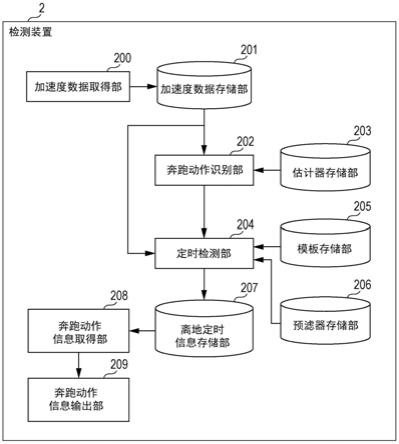
12.图3是表示本发明的实施方式所涉及的检测装置的功能性结构的图。
13.图4是表示本发明的实施方式所涉及的用户的腰的位置的随时间推移的波形的一例的图。
14.图5是表示本发明的实施方式所涉及的累积成本图的一例的图。
15.图6是表示本发明的实施方式所涉及的终端装置的物理结构的图。
16.图7是表示本发明的实施方式所涉及的终端装置的功能性结构的图。
17.图8是表示本发明的实施方式所涉及的信息处理装置的物理结构的图。
18.图9是用于说明本发明的实施方式所涉及的信息处理装置所执行的估计器生成处理的流程图。
19.图10是用于说明本发明的实施方式所涉及的信息处理装置所执行的预滤器生成处理的流程图。
20.图11是用于说明本发明的实施方式所涉及的信息处理装置所执行的模板生成处理的流程图。
21.图12是用于说明本发明的实施方式所涉及的检测装置所执行的控制处理的流程图。
22.图13是用于说明本发明的实施方式所涉及的检测装置所执行的输出处理的流程图。
23.图14是用于说明本发明的实施方式所涉及的检测装置所执行的定时检测处理的流程图。
24.图15是用于说明本发明的实施方式所涉及的检测装置所执行的动态时间伸缩处理的流程图。
25.图16是用于说明本发明的实施方式所涉及的终端装置所执行的提示处理的流程图。
具体实施方式
26.以下,参照附图对本发明的实施方式进行说明。在图中,对彼此相同或同等的结构标注相同的附图标记。
27.图1所示的测定系统1在持有检测装置2的检测装置2的用户跑步时、即用户通过进行奔跑动作而移动时,取得表示用户正在进行的奔跑动作的特征的奔跑动作信息,并向用户提示所取得的奔跑动作信息。检测装置2的用户是对象者的一例。奔跑动作是移动动作的一例。奔跑动作信息是移动动作信息的一例。另外,在本实施方式中,设为对象者是持有检测装置2的检测装置2的用户的情况进行说明,但这只不过是一例。对象者也可以是从持有检测装置2的检测装置2的用户借用检测装置2来使用的人。
28.如图1所示,测定系统1具备装备于用户的腰的检测装置2和由用户持有的终端装置3。检测装置2是测定装置的一例。检测装置2具备主体部20和卷绕于用户的腰的腰带部21。检测装置2的主体部20通过腰带部21固定于用户的腰的中央部。检测装置2在用户跑步时,检测正跑步的用户的加速度、即用户的身体的加速度的随时间推移。检测装置2根据检测到的用户的加速度的随时间推移,来检测用户跑步时用户进行离地动作的离地定时。离
地动作是使双脚中的至少一方从地面离开的动作。用户在进行奔跑动作的情况下,交替地反复执行离地动作和后述的着地动作。即,离地动作以及着地动作是奔跑动作所包含的与奔跑动作相关的动作。离地动作是对象动作的一例。离地定时是对象定时的一例。检测装置2根据检测出的离地定时取得奔跑动作信息,并将取得的奔跑动作信息向终端装置3发送。
29.另外,在本实施方式中,设为用户通过进行奔跑动作来移动的情况进行说明,但这只不过是一例。用户能够通过进行任意的移动动作来移动。例如,用户也可以通过进行步动作作来移动。在这种情况下,检测装置2检测正步行的用户的加速度的随时间推移,根据检测出的用户的加速度的随时间推移,来检测正步行的用户进行离地动作的离地定时,根据检测到的离地定时,来取得表示用户的步行动作的特征的步行动作信息即可。步行动作是移动动作的一例,步行动作信息是移动动作信息的一例。此外,在本实施方式中,说明检测装置2固定于用户的腰的情况,但这只不过是一例,检测装置2能够固定于用户的身体的任意的一部分。例如,也可以将检测装置2固定于用户的胸部。或者,也可以将检测装置2固定于用户的腹部。此外,在本实施方式中,说明检测装置2通过腰带部21固定于用户的腰的情况,但这只不过是一例,检测装置2能够通过任意的方法固定于用户的腰。例如,也可以将检测装置2通过夹入用户的衣服的夹子固定于用户的腰。
30.终端装置3是智能手机,从检测装置2接收奔跑动作信息,将接收到的奔跑动作信息提示给用户。另外,在本实施方式中,说明终端装置3是智能手机的情况,但这只不过是一例,终端装置3可以是平板终端、智能手表、pc(personal computer:个人计算机)等任意的信息处理终端装置。另外,在本实施方式中,说明了检测装置2取得奔跑动作信息并向终端装置3发送,终端装置3接收奔跑动作信息并向用户提示的情况,但这只不过是一例,也可以由检测装置2向用户提示取得的奔跑动作信息。
31.另外,在本实施方式中,说明检测装置2作为本发明所涉及的测定装置发挥功能的情况,但这只不过是一例,终端装置3也可以作为本发明所涉及的测定装置发挥功能。在这种情况下,终端装置3从检测装置2取得表示由检测装置2检测出的用户的加速度的随时间推移的数据,基于所取得的该数据,来在本实施方式中执行检测装置2执行的离地定时的检测、奔跑动作信息的取得等处理,向用户提示所取得的奔跑动作信息即可。或者,也可以构成为测定系统1具备与检测装置2和终端装置3中的哪一个都不同的pc、服务器等信息处理装置,该信息处理装置作为本发明所涉及的测定装置发挥功能。在这种情况下,信息处理装置从检测装置2取得表示由检测装置2检测出的用户的加速度的随时间推移的数据,基于所取得的该数据,来在本实施方式中执行检测装置2执行的离地定时的检测、奔跑动作信息的取得等处理即可。信息处理装置向终端装置3发送所取得的奔跑动作信息,终端装置3向用户提示从该信息处理装置接收到的奔跑动作信息即可。
32.以下,为了容易理解,设定图1所示的xyz坐标轴。在图1中,箭头g表示铅垂方向,即重力加速度的方向。此外,在图1中,箭头k表示用户的行进方向、即从用户的身体的背面朝向用户的身体的前表面的方向。图1所示的x轴方向、y轴方向以及z轴方向相互正交。x轴方向是与用户的行进方向正交的方向。x轴正方向是朝向用户的行进方向而从右侧朝向左侧的方向,x轴负方向是朝向用户的行进方向而从左侧朝向右侧的方向。y轴方向是与用户的行进方向平行的方向。y轴正方向是用户的行进方向,y轴负方向是与用户的行进方向相反的方向。z轴方向是与铅垂方向平行的方向。z轴正方向是与铅垂方向相反的方向,z轴负方
向是铅垂方向。
33.以下,参照图2~图5对检测装置2的物理/功能性结构进行说明。首先,参照图2对检测装置2的物理结构进行说明。检测装置2除了上述的主体部20以及腰带部21之外,如图2所示,还具备至少一个作为处理器的cpu(central processing unit:中央处理单元)22、至少一个作为存储器的rom(read only memory:只读存储器)23、ram(random access memory:随机存取存储器)24、通信部25、操作部26、计时部27以及传感器部28。cpu22~传感器部28经由作为指令以及数据的传输路径的系统总线29相互连接。cpu22~传感器部28内置于主体部20。另外,在图2中,仅示出了检测装置2所具备的物理结构中的与本发明的特征部相关的结构。检测装置2能够具备图2未示出的任意的物理结构。例如,检测装置2也可以具备显示各种图像的显示装置。
34.cpu22根据rom23中存储的程序以及数据,控制检测装置2的各部,并且执行各种处理。rom23非暂时地存储用于cpu22执行各种处理的程序以及数据。ram24作为cpu22的工作区发挥功能。即,cpu22将由rom23存储的程序以及数据读出到ram24,通过参照读出的程序以及数据来执行各种处理。此外,cpu22将通过执行各种处理而取得的数据暂时存储在ram24中,通过参照所存储的数据来执行各种处理。通信部25按照cpu22的控制在与包括终端装置3的外部设备之间进行无线通信或有线通信,发送接收数据。通信部25将从外部的设备接收到的数据向cpu22输出。操作部26具备受理用户的操作的多个键,该多个键包括受理对检测装置2的电源的接通/断开进行切换的操作的检测装置电源键,检测用户对该多个键的操作,向cpu22输出表示检测结果的操作信号。计时部27具备rtc(real time clock:实时时钟),对当前时刻进行计时,并将表示计时结果的计时信号向cpu22输出。传感器部28检测用户的身体的加速度以及角速度。传感器部28具备加速度传感器28a和角速度传感器28b。加速度传感器28a检测相互正交的3轴方向的加速度,角速度传感器28b检测绕着3轴方向的角速度。加速度传感器28a将表示加速度的检测结果的加速度信号依次发送到cpu22。角速度传感器28b将表示角速度的检测结果的角速度信号依次发送到cpu22。
35.具备上述的物理结构的检测装置2在功能上如图3所示,具备加速度数据取得部200、加速度数据存储部201、奔跑动作识别部202、估计器存储部203、定时检测部204、模板存储部205、预滤器存储部206、离地定时信息存储部207、奔跑动作信息取得部208以及奔跑动作信息输出部209。加速度数据取得部200、奔跑动作识别部202、定时检测部204、奔跑动作信息取得部208以及奔跑动作信息输出部209由cpu22实现。即,cpu22通过执行存储在rom23中的程序来控制检测装置2的各部,由此作为加速度数据取得部200、奔跑动作识别部202、定时检测部204、奔跑动作信息取得部208以及奔跑动作信息输出部209发挥功能。估计器存储部203、模板存储部205以及预滤器存储部206由rom23实现。即,估计器存储部203、模板存储部205以及预滤器存储部206构建在rom23的存储区域。加速度数据存储部201以及离地定时信息存储部207通过ram24来实现。即,加速度数据存储部201以及离地定时信息存储部207构建在ram24的存储区域。另外,在图3中,仅表示检测装置2所具备的功能性结构中的与本发明的特征部相关的功能性结构。检测装置2也可以具备图3未示出的任意的功能性结构。例如,检测装置2也可以具备控制上述显示装置的图像的显示的显示控制部。
36.加速度数据取得部200根据从加速度传感器28a输入的加速度信号,取得表示用户的加速度的随时间推移的加速度数据。具体而言,加速度数据取得部200使用卡尔曼滤波
器,根据从加速度传感器28a输入的加速度信号所表示的加速度的检测结果、和从角速度传感器28b输入的角速度信号所表示的角速度的检测结果来估计铅垂方向以及用户的行进方向,由此将由加速度传感器28a检测出的传感器坐标系中的加速度的值变换为由上述的xyz坐标轴定义的世界坐标系中的加速度的值。加速度数据取得部200通过以给定的采样频率(在本实施方式中为200hz)对变换后的加速度的值进行采样来取得加速度数据。这样取得的加速度数据按时间序列顺序包括多个采样点的数据,加速度数据所包括的一个采样点的数据表示在该一个采样点中由加速度传感器28a检测出的用户的加速度。由加速度数据取得部200取得的加速度数据包括:x轴加速度数据,其表示x轴方向上的用户的加速度的随时间推移;y轴加速度数据,其表示y轴方向上的用户的加速度的随时间推移;以及z轴加速度数据,其表示z轴方向上的用户的加速度的随时间推移。即,包括x轴加速度数据、y轴加速度数据以及z轴加速度数据的加速度数据表示x轴方向、y轴方向以及z轴方向上的用户的加速度的随时间推移。y轴加速度数据是第一加速度数据的一例,z轴加速度数据是第二加速度数据的一例。
37.另外,在本实施方式中,说明加速度数据取得部200使用卡尔曼滤波器将由加速度传感器28a检测出的传感器坐标系中的加速度的值变换为由上述的xyz坐标轴定义的世界坐标系中的加速度的值的例子,但这只不过是一例。加速度数据取得部200能够通过任意的方法,将由加速度传感器28a检测出的传感器坐标系中的加速度的值变换为世界坐标系中的加速度的值。例如也可以,传感器部28构成为除了具备加速度传感器28a以及角速度传感器28b以外,还具备检测相互正交的3轴方向的地磁的地磁传感器,加速度数据取得部200根据该地磁传感器的地磁的检测结果来估计铅垂方向,由此将由加速度传感器28a检测出的传感器坐标系中的加速度的值变换为世界坐标系中的加速度的值。
38.加速度数据存储部201存储由加速度数据取得部200取得的加速度数据。每当从加速度传感器28a输入加速度信号时,加速度数据取得部200就取得与该加速度信号对应的加速度数据,并将取得的加速度数据存储于加速度数据存储部201。通过这样的结构,由加速度数据取得部200取得的加速度数据被蓄积在加速度数据存储部201中。
39.奔跑动作识别部202根据由加速度数据取得部200取得的加速度数据,来识别用户所进行的奔跑动作是第一奔跑动作和与该第一奔跑动作相比离地定时晚的第二奔跑动作中的哪一个。第一奔跑动作是用户以成人的平均跑步速度即第一基准速度(在本实施方式中为2.5m/s)跑步的情况下的奔跑动作。第二奔跑动作是用户以低速、即比上述的第一基准速度慢的第二基准速度(在本实施方式中为2.0m/s)跑步的情况下的奔跑动作。在用户通过进行第一奔跑动作而移动的情况下,用户的双脚不会同时与地面接触。与此相对,在用户通过进行第二奔跑动作而移动的情况下,存在用户的双脚同时与地面接触的情况。第一奔跑动作是第一移动动作的一例。第二奔跑动作是第二移动动作的一例。
40.以下,参照图4对第一奔跑动作与第二奔跑动作的不同进行说明。图4表示表示z轴方向上的用户的腰的位置的随时间推移的波形的一例。在图4中,t1表示在z轴方向的用户的腰的位置的随时间推移中z轴方向上的用户的腰的位置成为极大值的第一极大值定时。此外,在图4中,t2表示接着z轴方向的用户的腰的位置的随时间推移中z轴方向上的用户的腰的位置为第一极大值定时t1之后成为极大值的第二极大值定时。第一极大值定时是第一定时的一例,第二极大值定时是第二定时的一例。无论用户的奔跑动作是第一奔跑动作和
第二奔跑动作中的哪一个,都在从第一极大值定时t1到第二极大值定时t2为止的时间区间中包括离地定时ts。
41.在用户的奔跑动作为第二奔跑动作的情况下,与用户的奔跑动作为第一奔跑动作的情况相比,离地定时ts更晚,从离地定时ts到第二极大值定时t2的时间短。换言之,用户的奔跑动作为第二奔跑动作的情况与用户的奔跑动作为第一奔跑动作的情况相比,从第一极大值定时t1到离地定时ts的时间更长。因此,在用户的奔跑动作为第二奔跑动作的情况下,与用户的奔跑动作为第一奔跑动作的情况相比,从第一极大值定时t1到离地定时ts为止的时间d2相对于从第一极大值定时t1到第二极大值定时t2为止的时间d1的比率即基准比率更高。与离地定时ts对应的基准比率由下述的式(1)表示。在式(1)中,r表示与离地定时ts对应的基准比率,d1表示从第一极大值定时t1到第二极大值定时t2为止的时间,d2表示从第一极大值定时t1到离地定时ts为止的时间。
42.r=d2/d1
…
(1)
43.返回图3,奔跑动作识别部202根据与上述的离地定时对应的基准比率和给定的识别阈值的大小关系,来识别用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个。即,奔跑动作识别部202在与离地定时对应的基准比率小于识别阈值的情况下,识别为用户的奔跑动作是第一奔跑动作,另一方面,在与离地定时对应的基准比率为识别阈值以上的情况下,识别为用户的奔跑动作是第二奔跑动作。通过将检测装置2的用户以外的多个人作为被实验者的实验,来分别测定被实验者的奔跑动作为第一奔跑动作的情况下的基准比率和被实验者的奔跑动作为第二奔跑动作的情况下的基准比率,由此求出的被实验者的奔跑动作的种类与基准比率的相关关系,对应于该相关关系来预先设定识别阈值。在本实施方式中,识别阈值被设定为0.95。另外,在上述的实验中,在将未图示的加速度传感器装备于被实验者的腰的状态下,使被实验者在检测被实验者的离地动作的力板上进行奔跑动作,根据基于该力板的离地动作的检测结果来检测离地定时,并且根据通过对该加速度传感器的输出信号进行二次积分而得到的被实验者的腰的位置的随时间推移来检测第一极大值定时以及第二极大值定时,由此测定基准比率即可。另外,在本实施方式中,说明了在上述的实验中将检测装置2的用户以外的多个人作为被实验者的情况,但这只不过是一个例子。在上述的实验中,也可以将检测装置2的用户设为实验的被实验者,也可以将包括检测装置2的用户和检测装置2的用户以外的一人以上的人在内的多个人作为被实验者。
44.奔跑动作识别部202使在估计器存储部203中存储的离地类型的估计器根据由加速度数据取得部200取得的加速度数据来估计与离地定时对应的基准比率是否小于识别阈值,根据该估计的结果,来识别用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个。即,奔跑动作识别部202在离地类型估计器估计为与离地定时对应的基准比率小于识别阈值的情况下,识别为用户的奔跑动作是第一奔跑动作,另一方面,在离地类型估计器估计为与离地定时对应的基准比率为识别阈值以上的情况下,识别为用户的奔跑动作是第二奔跑动作。
45.离地类型估计器是支持向量机(svm:support vector machine),根据加速度数据来估计与离地定时对应的基准比率是否小于识别阈值。具体而言,离地类型估计器对被输入比加速度数据所表示的第二极大值定时提前给定的第一基准时间(在本实施方式中为500ms)的定时的x轴方向、y轴方向以及z轴方向的用户的加速度作为特征量这一情况做出
响应,来估计与离地定时对应的基准比率是否小于识别阈值。离地类型估计器在由后述的信息处理装置4生成后,被取入检测装置2,并预先存储于估计器存储部203。关于由信息处理装置4进行的离地类型估计器的生成,将在后面叙述。另外,在本实施方式中,说明了离地类型估计器是支持向量机的情况,但这只不过是一例。离地类型估计器可以是估计基准比率是否小于识别阈值的任意的估计器。例如,离地类型估计器也可以是dnn(deep neural network,深度神经网络)。
46.奔跑动作识别部202在使用离地类型估计器进行估计时,根据由加速度数据取得部200取得的加速度数据来检测第一极大值定时以及第二极大值定时,将加速度数据所表示的比检测出的第二极大值定时提前第一基准时间的定时的x轴方向、y轴方向以及z轴方向的用户的加速度作为特征量输入到离地类型估计器,由此,使离地类型估计器估计与离地定时对应的基准比率是否小于识别阈值。具体而言,奔跑动作识别部202通过对由加速度数据取得部200取得的加速度数据中所包括的z轴加速度数据行二次积分,来取得表示z轴方向上的用户的腰的位置的随时间推移的z轴位置数据。如上所述,加速度数据根据从内置于装备于用户的腰的检测装置2的加速度传感器28a输出的加速度信号而取得,因此通过对加速度数据所包括的z轴加速度数据进行二次积分,能够取得z轴位置数据。奔跑动作识别部202对所取得的z轴位置数据实施使用了移动平均滤波器的平滑化处理,根据实施了平滑化处理后的z轴位置数据来检测第一极大值定时以及第二极大值定时。另外,在本实施方式中,说明奔跑动作识别部202使用移动平均滤波器进行平滑化处理的情况,但这只不过是一例。奔跑动作识别部202能够使用低通滤波器、高斯滤波器等任意的平滑化滤波器对z轴位置数据进行平滑化处理。
47.定时检测部204在用户的奔跑动作为第一奔跑动作的情况下,使用第一检测方法检测离地定时,另一方面,在用户的奔跑动作为第二奔跑动作的情况下,使用与该第一检测方法不同的第二检测方法检测离地定时。具体而言,定时检测部204在由奔跑动作识别部202识别为用户的奔跑动作是第一奔跑动作的情况下,使用第一检测方法检测离地定时,另一方面,在由奔跑动作识别部202识别为用户的奔跑动作是第二奔跑动作的情况下,使用第二检测方法检测离地定时。
48.不管是使用第一检测方法和第二检测方法中的哪一个来检测离地定时的情况,定时检测部204都根据由加速度数据取得部200取得的加速度数据所表示的检测对象方向上的用户的加速度的随时间推移和由模板存储部205存储的模板,来检测离地定时。模板是表示被实验者进行离地动作时的被实验者的加速度的随时间推移的数据。具体而言,模板按时间序列顺序包括多个采样点的数据,模板包括的一个采样点的数据表示在该一个采样点检测出的被实验者的加速度。模板包括表示被实验者进行离地动作的定时的数据。模板在由后述的信息处理装置4生成后,被取入检测装置2,预先存储在模板存储部205中。关于信息处理装置4的模板的生成,将在后面叙述。模板是基准数据的一例。
49.在定时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,检测对象方向不同。具体而言,在第一检测方法中,将y轴方向设定为检测对象方向,根据加速度数据所表示的y轴方向上的用户的加速度的随时间推移来检测离地定时。与此相对,在第二检测方法中,将z轴方向设定为检测对象,根据加速度数据所表示的z轴方向上的用户的加速度的随时间推移来检测离地定时。进而,在定
时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,检测中使用的模板不同。具体而言,模板存储部205存储y轴模板和z轴模板作为模板。y轴模板是表示被实验者进行离地动作时的y轴方向上的被实验者的加速度的随时间推移的模板。z轴模板是表示被实验者进行离地动作时的z轴方向上的被实验者的加速度的随时间推移的模板。在y轴模板以及z轴模板中分别包括表示被实验者进行离地动作的定时的数据。y轴模板是与y轴方向对应的模板,z轴模板是与z轴方向对应的模板。在第一检测方法中,使用与第一检测方法中的检测对象方向即y轴方向对应的y轴模板进行离地定时的检测。在第二检测方法中,使用与第二检测方法中的检测对象方向即z轴方向对应的z轴模板进行离地定时的检测。y轴模板是第一基准数据的一例,z轴模板是第二基准数据的一例。
50.根据本发明的发明人进行的实验,明确了在用户通过进行第一奔跑动作而移动时,在用户进行离地动作的情况下,进行离地动作时特征性的加速度的推移波形相比于z轴方向上的用户的加速度的随时间推移而更显著的呈现于y轴方向上的用户的加速度的随时间推移中。与此相对,根据本发明的发明人进行的实验,明确了在用户通过进行第二奔跑动作而移动时,在用户进行离地动作的情况下,进行离地动作时特征性的加速度的推移波形相比于y轴方向上的用户的加速度的随时间推移而更显著地呈现于z轴方向上的用户的加速度的随时间推移中。定时检测部204在用户的奔跑动作为第一奔跑动作的情况下,使用第一检测方法,根据加速度数据所表示的y轴方向上的用户的加速度的随时间推移,使用与y轴方向对应的y轴模板来检测离地定时,另一方面,在用户的奔跑动作是第二奔跑动作的情况下,使用第二检测方法,根据加速度数据所表示的z轴方向上的用户的加速度的随时间推移,使用与z轴方向对应的z轴模板来检测离地定时,由此提高离地定时的检测精度。特别是,根据这样的结构,在用户的奔跑动作为第二奔跑动作的情况下,即用户以低速跑步的情况下,能够提高离地定时的检测精度。即,定时检测部204通过根据用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个而使用不同的检测方法来检测离地定时,从而利用与用户的奔跑动作的种类相应的适当的检测方法来检测离地定时,提高离地定时的检测精度。
51.不管是使用第一检测方法和第二检测方法中的哪一个检测离地定时的情况下,定时检测部204都使用动态时间伸缩(dtw:dynamic timewarping)法,将加速度数据所包括的x轴加速度数据、y轴加速度数据以及z轴加速度数据中的与检测对象方向对应的加速度数据、和由模板存储部205存储的y轴模板以及z轴模板中的与检测对象方向对应的模板相互建立对应,将该模板所示的与被实验者进行离地动作的定时对应的该加速度数据中的定时检测为离地定时。即,在使用第一检测方法检测离地定时的情况下,定时检测部204使用动态时间伸缩法来将与第一检测方法中的检测对象方向即y轴方向对应的y轴加速度数据和与y轴方向对应的y轴模板相互建立对应,将y轴模板所示的与被实验者进行离地动作的定时对应的y轴加速度数据中的定时检测为离地定时。在使用第二检测方法检测离地定时的情况下,定时检测部204使用动态时间伸缩法来将与第二检测方法中的检测对象方向即z轴方向对应的z轴加速度数据和与z轴方向对应的z轴模板相互建立对应,将与z轴模板所示的被实验者进行离地动作的定时对应的z轴加速度数据中的定时检测为离地定时。
52.具体而言,定时检测部204使用动态时间伸缩法,将与检测对象方向对应的加速度
数据中的含在搜索区间中的数据和与检测对象方向对应的模板相互建立对应,将与该模板所示的被实验者进行离地动作的定时对应的该加速度数据中的定时检测为离地定时。搜索区间是与上述的第一极大值定时以及第二极大值定时对应的时间区间。具体而言,搜索区间是从比第二极大值定时提前第二基准时间的定时到第二极大值定时为止的时间区间,该第二基准时间是在从第一极大值定时到第二极大值定时为止的时间上乘以给定的基准乘数(在本实施方式中为0.5)而得到的时间。
53.将通过动态时间伸缩法与模板建立对应的加速度数据限定于上述的含在搜索区间中的加速度数据,由此能够减轻计算负担。在搜索区间以外的区间中包括作为检测对象的离地定时的可能性低,即使将离地定时的检测区间限定于搜索区间,离地定时的检测精度也几乎不降低。反而,在将搜索区间以外的区间包括于离地定时的检测区间中的情况下,由于会将含在搜索区间以外的区间中的实际上用户未进行离地动作的定时错误地检测为离地定时,因而离地定时的检测精度反而有可能降低。因此,定时检测部204通过使用动态时间伸缩法将含在搜索区间中的加速度数据和模板相互建立对应来检测离地定时,从而减轻计算负担,并且提高离地定时的检测精度。
54.搜索区间的时间长度根据用户的奔跑速度而不同。因此,由于用户的奔跑速度的偏差,与模板建立对应的加速度数据的时间长度产生偏差。定时检测部204通过使用动态时间伸缩法来使加速度数据与模板相互建立对应,能够与该加速度数据的时间长度无关地将该加速度数据与该模板相互适当地建立对应。因此,定时检测部204通过使用动态时间伸缩法,能够与由用户的奔跑速度的偏差引起的加速度数据的时间长度的偏差无关地,将该加速度数据和模板相互适当地建立对应,来检测离地定时。换言之,定时检测部204通过使用动态时间伸缩法来将加速度数据和模板相互建立对应,来检测离地定时,从而能够相对于用户的奔跑速度的偏差而强健地检测离地定时,提高离地定时的检测精度。
55.在使用动态时间伸缩法将加速度数据和模板相互建立对应时,定时检测部204针对该加速度数据的各采样点的数据,计算与该模板的各采样点的数据之间的距离,由此作成表示该加速度数据的各采样点的数据与该模板的各采样点的数据之间的距离的距离矩阵。在作成距离矩阵时,定时检测部204计算数据间的差分的绝对值作为数据间的距离。在动态时间伸缩法中,有时数据间的距离被称为成本。另外,在本实施方式中,说明定时检测部204计算数据间的差分的绝对值作为数据间的距离的情况,但这只不过是一个例子,定时检测部204能够计算任意的距离作为数据间的距离。例如,定时检测部204可以计算数据之间的余弦距离作为数据之间的距离。
56.在作成上述的距离矩阵之后,定时检测部204求取路径中的、位于路径上的该距离矩阵的要素的总和最小的路径即最佳路径,其中,所述路径是该距离矩阵上的路径,将表示加速度数据的起始端的数据与模板的起始端的数据之间的距离的该距离矩阵的要素作为起始端,将表示加速度数据的末端的数据与模板的末端的数据之间的距离的该距离矩阵的要素作为末端。在动态时间伸缩法中,最佳路径有时也被称为规整路径。最佳路径是经过距离矩阵的多个要素的路径,换言之,是连接该多个要素的路径。最佳路径是从起始端到末端之间没有中断的路径,并且,并且是不会在从起始端到末端之间后退的路径。
57.上述最佳路径表示通过动态时间伸缩法求出的加速度数据与模板的对应关系。具体而言,在作为最佳路径上的要素而包括表示加速度数据的第一采样点中的数据与模板的
第二采样点的数据之间的距离的要素的情况下,这些数据相互对应,第一采样点和第二采样点相互对应。定时检测部204通过使用动态时间伸缩法来求出表示加速度数据与模板之间的对应关系的最佳路径,由此使该加速度数据与该模板相互建立对应。加速度数据的各采样点的数据通过表示该加速度数据与模板之间的对应关系的最佳路径,来与该模板的各采样点的数据建立对应。换言之,加速度数据的各采样点通过表示该加速度数据与模板之间的对应关系的最佳路径,来与该模板的各采样点建立对应。
58.定时检测部204通过使用动态时间伸缩法来求出表示加速度数据与模板之间的对应关系的最佳路径,由此将该加速度数据与该模板相互建立对应,将该模板所示的与用户进行离地动作的定时对应的该加速度数据中的定时检测为离地定时。即,在作为所求出的最佳路径上的要素而包括表示模板所包括的各采样点的数据中的该模板所示的用户进行离地动作的定时的数据、与加速度数据所包括的各采样点的数据中的一个定时的数据之间的距离的要素的情况下,定时检测部204将与该用户进行离地动作的定时对应的该一个定时检测为离地定时。在这种情况下,模板所包括的各采样点的数据中的该模板所示的用户进行离地动作的定时的数据和加速度数据所包括的各采样点的数据中的一个定时的数据相互建立对应。
59.以下,参照图5对模板与加速度数据之间的对应关系进行具体说明。图5示出了表示y轴模板a1与y轴加速度数据a2之间的对应关系的累积成本图a3。y轴加速度数据a2是与从上述的第一极大值定时到第二极大值定时的时间区间对应的y轴加速度数据,在时间轴方向上被归一化为从0到100的范围,并且被归一化为加速度从-10到10的范围。在累积成本图a3的纵轴与y轴模板a1的时间轴建立对应,在累积成本图a3的横轴与y轴加速度数据a2的时间轴建立对应。
60.累积成本图a3中的最小单元是与最小单元对应的累积成本越大则被着色越浓的灰色。与最小单元对应的累积成本是表示到达该最小单元的最佳路径上的y轴模板a1的各采样点的数据与y轴加速度数据a2的各采样点的数据之间的距离的距离矩阵的要素的总和。到达最小单元的最佳路径是上述距离矩阵上的路径。到达最小单元的最佳路径的起始端是表示y轴模板a1的起始端的数据与y轴加速度数据a2的起始端的数据之间的距离的上述距离矩阵的要素。到达最小单元的最佳路径的末端是表示y轴模板a1的与该最小单元对应的采样定时的数据与y轴加速度数据a2的与该最小单元对应的采样定时的数据之间的距离的上述距离矩阵的要素。到达最小单元的最佳路径是在从上述的起始端到末端的上述距离矩阵上的路径中,位于路径上的该距离矩阵的要素的总和最小的路径。y轴模板a1所包括的多个采样定时的数据中的、与累积成本图a3中的一个最小单元的累积成本图a3的纵轴方向上的位置对应的y轴模板a1的时间轴上的采样定时的数据是y轴模板a1的与该一个最小单元对应的采样点的数据。此外,y轴加速度数据a2所包括的多个采样定时的数据中的、与累积成本图a3中的一个最小单元的累积成本图a3的横轴方向上的位置对应的y轴加速度数据a2的时间轴上的采样定时的数据是y轴加速度数据a2的与该一个最小单元对应的采样点的数据。
61.在累积成本图a3中,图示了与各最小单元对应的累积成本,并且示出了表示y轴模板a1与y轴加速度数据a2之间的对应关系的最佳路径a4。y轴模板a1的各采样点的数据通过最佳路径a4与y轴加速度数据a2的各采样点的数据建立对应。换言之,y轴模板a1的各采样
点通过最佳路径a4与y轴加速度数据a2的各采样点建立对应。例如,如图5所示,y轴模板a1所示的被实验者进行离地动作的定时ta通过最佳路径a4与y轴加速度数据a2的时间轴上的定时tb建立对应。即,作为最佳路径a4上的距离矩阵的要素,包括表示y轴模板a1的定时ta的数据与y轴加速度数据a2的定时tb的数据之间的距离的要素,这些数据通过最佳路径a4相互建立对应。在定时检测部204使用图5所示的y轴模板a1以及y轴加速度数据a2进行离地定时的检测的情况下,将与y轴模板a1所示的被实验者进行离地动作的定时ta对应的y轴加速度数据a2中的定时tb检测为离地定时。
62.返回图3,不管是使用第一检测方法和第二检测方法中的哪一个检测离地定时的情况,定时检测部204都使用由预滤器存储部206存储的预滤器,对与检测对象方向对应的加速度数据进行强调用户进行离地动作的情况下的特征性的加速度的推移波形的预滤器处理,使用动态时间伸缩法来将实施了预滤器处理后的该加速度数据和与检测对象方向对应的模板相互建立对应,由此来检测离地定时。根据这样的结构,能够提高离地定时的检测精度。预滤器在由后述的信息处理装置4生成后,被取入检测装置2,预先存储在预滤器存储部206中。稍后将描述由信息处理装置4执行的预滤器的生成。
63.在定时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,预滤器处理中使用的预滤器不同。具体而言,预滤器存储部206存储y轴预滤器和z轴预滤器作为预滤器。y轴预滤器是在用户进行离地动作的情况下强调特征性的y轴方向的加速度的推移波形的预滤器。z轴预滤器是在用户进行离地动作的情况下强调特征性的z轴方向的加速度的推移波形的预滤器。在第一检测方法中,针对与第一检测方法中的检测对象方向即y轴方向对应的y轴加速度数据,使用与y轴方向对应的y轴预滤器进行预滤器处理,根据进行了预滤器处理后的y轴加速度数据,来检测离地定时。在第二检测方法中,针对与第二检测方法中的检测对象方向即z轴方向对应的z轴加速度数据,使用与z轴方向对应的z轴预滤器进行预滤器处理,根据进行了预滤器处理后的z轴加速度数据,来检测离地定时。根据这样的结构,通过根据用户的奔跑动作的种类使用适当的预滤器进行预滤器处理,能够提高离地定时的检测精度。
64.另外,在本实施方式中,说明为定时检测部204对与检测对象方向对应的加速度数据实施预滤器处理,并根据与实施了预滤器处理后的检测对象方向对应的加速度数据来检测离地定时,但这只不过是一例。定时检测部204也可以不进行预滤器处理,而根据与未实施预滤器处理的检测对象方向对应的加速度数据来检测离地定时。根据这样的结构,能够减轻计算负担。
65.另外,在本实施方式中,对定时检测部204检测进行离地动作的离地定时的情况进行说明,但这只不过是一例。定时检测部204能够检测正移动的用户进行任意的动作的定时。例如,定时检测部204也可以检测在用户正跑步(或者正在步行)时用户进行着地动作的着地定时。着地动作是使奔跑中(或者步行中)的用户从地面离开的脚着落到地面的动作。着地动作是对象动作的一例,着地定时是对象定时的一例。在这种情况下,定时检测部204通过将上述的离地定时的检测方法应用于着地定时的检测,能够检测着地定时。具体而言,在这种情况下,在模板存储部205中预先存储表示被实验者进行着地动作时的被实验者的加速度的随时间推移的数据,作为模板。该模板中包括表示被实验者进行着地动作的定时的数据。定时检测部204使用动态时间伸缩法,将与检测对象方向对应的加速度数据和由模
板存储部205存储的上述模板相互建立对应,将与该模板所示的被实验者进行着地动作的定时对应的该加速度数据中的定时检测为着地定时。通过这样的结构,能够提高着地定时的检测精度。
66.离地定时信息存储部207存储表示定时检测部204的离地定时的检测历史记录的离地定时信息。在离地定时信息中按时间序列顺序存放有表示由定时检测部204检测出的离地定时的数据。每当检测到离地定时时,定时检测部204就通过在由离地定时信息存储部207存储的离地定时信息中追加表示检测到的离地定时的数据,来更新该离地定时信息。通过这样的结构,定时检测部204的离地定时的检测结果被蓄积在离地定时信息存储部207中。
67.奔跑动作信息取得部208根据由定时检测部204检测出的离地定时,来取得表示用户的奔跑动作的特征的奔跑动作信息。在本实施方式中,奔跑动作信息取得部208取得多个在时间轴上相互相邻的两个离地定时的时间间隔即离地定时间隔,作为奔跑动作信息,取得表示所取得的多个离地定时间隔的平均值即平均离地间隔的信息。用户通过调整自身的跑步方式,以使得由终端装置3提示的奔跑动作信息所表示的平均离地间隔变短,能够提高奔跑速度。奔跑动作信息取得部208每当由定时检测部204检测出离地定时,并根据检测出的离地定时更新存储于离地定时信息存储部207的离地定时信息时,就根据更新后的离地定时信息取得(即,计算)平均离地间隔,由此取得表示平均离地间隔的奔跑动作信息。
68.另外,在本实施方式中,说明奔跑动作信息取得部208取得表示平均离地间隔的信息作为奔跑动作信息的情况,但这只不过是一例。奔跑动作信息取得部208能够取得表示用户的奔跑动作的特征的任意的信息作为奔跑动作信息。例如也可以,定时检测部204构成为检测离地定时以及着地定时,奔跑动作信息取得部208根据由定时检测部204检测出的离地定时以及着地定时,来取得表示用户的双脚中的至少一方与地面接触的时间即接地时间的信息,作为奔跑动作信息。具体而言,奔跑动作信息取得部208取得从由定时检测部204检测出的着地定时到由定时检测部204检测出的离地定时为止的时间,作为接地时间即可。或者,奔跑动作信息取得部208也可以根据由定时检测部204检测出的离地定时以及着地定时,取得表示用户的双脚中的至少一方从地面离开的时间即滞空时间的信息,作为奔跑动作信息。具体而言,奔跑动作信息取得部208取得从由定时检测部204检测出的离地定时到由定时检测部204检测出的着地定时为止的时间作为滞空时间即可。
69.奔跑动作信息输出部209输出由奔跑动作信息取得部208取得的奔跑动作信息。具体而言,奔跑动作信息输出部209控制通信部25,使其向终端装置3发送奔跑动作信息。另外,在本实施方式中,说明了奔跑动作信息输出部209将奔跑动作信息向终端装置3发送的情况,但这只不过是一例。奔跑动作信息输出部209能够通过任意的方法输出奔跑动作信息。例如,奔跑动作信息输出部209也可以通过以用户能够识别的方式输出奔跑动作信息,来向用户提示奔跑动作信息。具体而言,奔跑动作信息输出部209也可以通过在上述的显示装置中显示与奔跑动作信息对应的图像,向用户提示该奔跑动作信息。
70.如上所述,定时检测部204通过使用与用户的奔跑动作的种类相应的检测方法来检测离地定时,从而提高离地定时的检测精度。而且,如上所述,奔跑动作信息取得部208根据由定时检测部204检测出的离地定时来取得奔跑动作信息,奔跑动作信息输出部209输出由奔跑动作信息取得部208取得的奔跑动作信息。根据这样的结构,能够提高奔跑动作信息
的准确性,提高对于用户而言的便利性。
71.以下,参照图6以及图7对终端装置3的物理/功能性结构进行说明。首先,参照图6对终端装置3的物理结构进行说明。如图6所示,终端装置3具备cpu30、rom31、ram32、通信部33、操作部34以及显示部35。cpu30~显示部35经由作为指令以及数据的传送路径的系统总线36相互连接。另外,在图6中,仅示出终端装置3所具备的物理结构中的与本发明的特征部相关的结构。终端装置3可以具备图6未示出的任意的物理结构。例如,终端装置3也可以具备输出声音的扬声器、对用户发出的声音进行录音的麦克风。
72.cpu30按照存储在rom31中的程序以及数据,控制终端装置3的各部,并且执行各种处理。rom31非暂时地存储cpu30为了执行各种处理而使用的程序以及数据。ram32作为cpu30的工作区域发挥功能。即,cpu30将由rom31存储的程序以及数据向ram32读出,通过参照读出的程序以及数据来执行各种处理。此外,cpu30将通过执行各种处理而取得的数据暂时存储于ram32,通过参照所存储的数据来执行各种处理。通信部33按照cpu30的控制来在与包括检测装置2的外部设备之间进行无线通信或者有线通信,发送接收数据。通信部33将从外部设备接收到的数据向cpu30输出。操作部34具备受理用户的接触操作的触摸面板,检测用户对该触摸面板的接触操作,向cpu30输出表示检测结果的接触操作信号。用户通过对操作部34所具备的触摸面板进行接触操作,能够输入对终端装置3的各种指示,该各种指示包括使终端装置3开始奔跑动作信息的提示的指示、以及使终端装置3结束奔跑动作信息的提示的指示。进而,操作部34具备受理用户的操作的多个键,其中该多个键包括受理对终端装置3的电源的接通/断开进行切换的操作的终端装置电源键,检测用户对该多个键的操作,将表示检测结果的键操作信号向cpu30输出。显示部35具备液晶显示器、有机el(electroluminescence:电致发光)显示器等显示器,按照cpu30的控制显示各种图像。操作部34所具备的上述触摸面板与显示部35所具备的上述显示器重叠配置。
73.如图7所示,具备上述的物理结构的终端装置3具备奔跑动作信息接收部300和奔跑动作信息提示部301。奔跑动作信息接收部300以及奔跑动作信息提示部301由cpu30实现。即,cpu30通过执行存储于rom31的程序来控制终端装置3的各部,从而作为奔跑动作信息接收部300以及奔跑动作信息提示部301发挥功能。另外,在图7中,仅表示终端装置3所具备的功能性结构中的与本发明的特征部相关的功能性结构。终端装置3也可以具备图7中未示出的任意的功能性结构。例如,终端装置3也可以具备控制上述扬声器的声音输出的声音输出控制部。
74.奔跑动作信息接收部300从检测装置2接收奔跑动作信息。具体而言,奔跑动作信息接收部300控制通信部33,按照上述的检测装置2的奔跑动作信息输出部209的控制,接收使得从检测装置2的通信部25发送的奔跑动作信息。奔跑动作信息提示部301通过以用户能够认识的方式输出由奔跑动作信息接收部300从检测装置2接收到的奔跑动作信息,从而向用户提示。具体而言,奔跑动作信息提示部301控制显示部35,通过显示与接收到的奔跑动作信息对应的奔跑动作信息图像,来向用户提示该奔跑动作信息。更具体而言,奔跑动作信息提示部301控制显示部35,显示表示接收到的奔跑动作信息所表示的平均离地间隔的图像(例如,表示“当前的平均离地间隔是x秒”这样的消息的图像),作为奔跑动作信息图像。在显示部35已经在显示奔跑动作信息图像时奔跑动作信息接收部300新接收到奔跑动作信息的情况下,奔跑动作信息提示部301控制显示部35,根据新接收到的奔跑动作信息来更新
所显示的奔跑动作信息图像。
75.另外,在本实施方式中,说明了奔跑动作信息提示部301通过在显示部35显示与奔跑动作信息对应的奔跑动作信息图像,来向用户提示奔跑动作信息的例子,但这只不过是一例。奔跑动作信息提示部301能够通过以用户能够识别的任意的方式输出奔跑动作信息,来向用户提示奔跑动作信息。例如,奔跑动作信息提示部301也可以通过使上述的扬声器输出与奔跑动作信息对应的奔跑动作信息声音(例如,表示“当前的平均离地间隔是x秒”这样的消息的声音),来向用户提示该奔跑动作信息。
76.以下,对上述的离地类型估计器、预滤器以及模板的生成进行说明。在本实施方式中,离地类型估计器、预滤器以及模板通过图8所示的外部的信息处理装置4生成后,被取入检测装置2。
77.信息处理装置4是由制造检测装置2的工厂的作业员操作的计算机等信息处理设备,如图8所示,具备cpu40、rom41、ram42、通信部43、操作部44以及显示部45。上述的作业员是操作信息处理装置4的操作员。cpu40~显示部45经由作为指令以及数据的传输路径的系统总线46相互连接。cpu40按照存储在rom41中的程序以及数据,控制信息处理装置4的各部,并且执行各种处理。rom41非暂时地存储cpu40为了执行各种处理而使用的程序以及数据。ram42作为cpu40的工作区域发挥功能。即,cpu40将由rom41存储的程序以及数据向ram42读出,通过参照读出的程序以及数据来执行各种处理。此外,cpu40将通过执行各种处理而取得的数据暂时存储于ram42,通过参照所存储的数据来执行各种处理。通信部43按照cpu40的控制在与包括检测装置2的外部设备之间进行无线通信或者有线通信,发送接收数据。通信部43将从外部设备接收到的数据向cpu40输出。操作部44检测作业员的操作,并将表示检测结果的操作信号向cpu40输出。作业员能够通过进行操作来输入对信息处理装置4的各种指示,该各种指示包括使信息处理装置4生成离地类型估计器的指示、使信息处理装置4生成预滤器的指示、以及使信息处理装置4生成模板的指示。显示部45具备液晶显示器、有机el显示器等显示器,按照cpu40的控制显示各种图像。
78.以下,对由信息处理装置4进行的离地类型估计器的生成进行说明。信息处理装置4通过执行图9的流程图所示的估计器生成处理,来生成离地类型估计器。以下,对图9的流程图所示的估计器生成处理进行说明。
79.在信息处理装置4的rom41中预先存储有cpu40在离地类型估计器的生成中使用的多个估计器学习数据。具体而言,在rom41中存储有给定的第一基准数(在本实施方式中为150)的推测器学习数据。在rom41中存储的多个估计器学习数据中包括多个正例估计器学习数据和多个负例估计器学习数据。正例估计器学习数据是表示与离地定时对应的基准比率小于识别阈值的情况下的比第二极大值定时提前的第一基准时间(在本实施方式中为500ms)的定时的x轴方向、y轴方向以及z轴方向的被实验者的加速度的数据。负例估计器学习数据是表示与离地定时对应的基准比率为识别阈值以上的情况下的比第二极大值定时提前第一基准时间的定时的x轴方向、y轴方向以及z轴方向的被实验者的加速度的数据。对正例估计器学习数据预先赋予了正例的类标签,对负例估计器学习数据预先赋予了负例的类标签。
80.在本实施方式中,在将检测装置2的用户以外的多个人作为被实验者的实验中,在被实验者的腰上装备了未图示的加速度传感器的状态下使被实验者进行奔跑动作,取得比
由该加速度传感器检测出的第二极大值定时提前第一基准时间的定时的x轴方向、y轴方向以及z轴方向的被实验者的加速度的数据,作为估计器学习数据,并预先存储在rom41中。具体而言,在本实施方式中,在上述的实验中,使被实验者在力板上进行奔跑动作,根据基于力板的被实验者的离地动作的检测结果来检测离地定时,并且根据通过对加速度传感器的输出信号进行二次积分而得到的被实验者的腰的位置的随时间推移来检测第一极大值定时以及第二极大值定时,由此测定与离地定时对应的基准比率。然后,通过对表示基准比率小于识别阈值的情况下的加速度的数据附加正例标签来生成正例估计器学习数据,并且通过对表示基准比率为识别阈值以上的情况下的加速度的数据附加负例标签来生成负例估计器学习数据,将生成的正例估计器学习数据以及负例估计器学习数据作为估计器学习数据预先存储于rom41。另外,在本实施方式中,说明了在上述的实验中将检测装置2的用户以外的多个人作为被实验者的情况,但这只不过是一例。在上述的实验中,也可以将检测装置2的用户设为实验的被实验者,也可以将包括检测装置2的用户和检测装置2的用户以外的一人以上的人在内的多个人作为被实验者。
81.在rom41中预先存储有估计器学习数据的状态下,当作业员向信息处理装置4输入生成离地类型估计器的指示时,cpu40开始图9的流程图所示的估计器生成处理。当开始估计器生成处理时,cpu40首先通过进行使用了rom41中存储的估计器学习数据作为示教数据的有监督学习来生成离地类型估计器(步骤s101)。在步骤s101中进行的有监督学习中,将比估计器学习数据所示的第二极大值定时提前第一基准时间的定时的被实验者的加速度作为特征量输入到离地类型估计器,通过识别为正例或者负例来生成离地类型识别器。在执行步骤s101的处理后,cpu40使在步骤s101中生成的离地类型估计器存储于ram42(步骤s102),结束估计器生成处理。
82.检测装置2通过在与信息处理装置4之间进行使用了通信部25的通信,来从信息处理装置4取入通过信息处理装置4进行上述的估计器生成处理而生成的离地类型估计器,并存储于在rom23的存储区域设置的估计器存储部203。
83.接下来,对由信息处理装置4进行的预滤器的生成进行说明。信息处理装置4通过执行图10的流程图所示的预滤器生成处理来生成预滤器。以下,对图10的流程图所示的预滤器生成处理进行说明。
84.在信息处理装置4的rom41中预先存储有用于cpu40生成后述的卷积神经网络(cnn:convolutional neural network)的多个cnn学习数据。具体而言,在rom41中存储有给定的第二基准数(在本实施方式中为200)的cnn学习数据。在rom41中存储的多个cnn学习数据中包括多个y轴cnn学习数据和多个z轴cnn学习数据。
85.y轴cnn学习数据是与y轴方向对应的cnn学习数据,z轴cnn学习数据是与z轴方向对应的cnn学习数据。在多个y轴cnn学习数据中包括多个y轴离地数据和多个y轴非离地数据。y轴离地数据是表示被实验者在进行离地动作的情况下的跨越给定的第三基准时间(在本实施方式中为3.0s)的y轴方向上的被实验者的加速度的随时间推移的数据。对y轴离地数据预先赋予了表示被实验者正在进行离地动作的标签。y轴非离地数据是表示被实验者在未进行离地动作的情况下的跨越第三基准时间的y轴方向上的被实验者的加速度的随时间推移的数据。对y轴非离地数据预先赋予表示被实验者未进行离地动作的标签。
86.在多个z轴cnn学习数据中包括多个z轴离地数据和多个z轴非离地数据。z轴离地
数据是表示被实验者在进行离地动作的情况下的跨越上述第三基准时间的z轴方向上的被实验者的加速度的随时间推移的数据。对z轴离地数据预先赋予了表示被实验者正在进行离地动作的标签。z轴非离地数据是表示被实验者在未进行离地动作的情况下的跨越第三基准时间的z轴方向上的被实验者的加速度的随时间推移的数据。对z轴非离地数据预先赋予表示被实验者未进行离地动作的标签。
87.在本实施方式中,在将检测装置2的用户以外的多个人作为被实验者的实验中,在被实验者的腰装备有未图示的加速度传感器的状态下使被实验者进行奔跑动作,使该加速度传感器取得表示y轴方向以及z轴方向上的被实验者的加速度的随时间推移的数据,并根据该数据而取得y轴离地数据、y轴非离地数据、z轴离地数据以及z轴非离地数据,并预先存储在rom41中。具体而言,从由加速度传感器取得的表示y轴方向上的被实验者的加速度的随时间推移的数据截取与包括被实验者进行离地动作的定时在内的上述第三基准时间的长度的时间区间对应的数据,对所截取的数据赋予表示正在进行离地动作的标签,由此生成y轴离地数据。此外,从由加速度传感器取得的表示y轴方向上的被实验者的加速度的随时间推移的数据截取与不包括被实验者进行离地动作的定时的第三基准时间的长度的时间区间对应的数据,对所截取的数据赋予表示未进行离地动作的标签,由此生成y轴非离地数据。
88.此外,从表示由加速度传感器取得的被实验者在z轴方向上的加速度的随时间推移的数据截取与包括被实验者进行离地动作的定时在内的第三基准时间的长度的时间区间对应的数据,对所截取的数据赋予表示正在进行离地动作的标签,由此生成z轴离地数据。此外,从表示由上述加速度传感器取得的z轴方向上的被实验者的加速度的随时间推移的数据截取与不包括被实验者进行离地动作的定时的第三基准时间的长度的时间区间对应的数据,对所截取的数据赋予表示未进行离地动作的标签,由此生成z轴非离地数据。另外,在通过上述加速度传感器检测被实验者的加速度的随时间推移时,使被实验者在力板上进行奔跑动作,通过该力板检测被实验者的离地动作,由此检测离地定时。另外,在本实施方式中,说明了在上述的实验中将检测装置2的用户以外的多个人作为被实验者的情况,但这只不过是一例。在上述的实验中,也可以将检测装置2的用户设为实验的被实验者,也可以将包括检测装置2的用户和检测装置2的用户以外的一人以上的人在内的多个人作为被实验者。
89.在rom41中预先存储有cnn学习数据的状态下,当作业员向信息处理装置4输入生成预滤器的指示时,cpu40开始图10的流程图所示的预滤器生成处理。
90.当开始预滤器生成处理时,cpu40首先随机地选择y轴方向和z轴方向中的任意一方,并设定为生成对象方向(步骤s201)。在执行步骤s201的处理后,cpu40通过进行使用了与存储于rom41的生成对象方向对应的cnn学习数据作为示教数据的有监督学习,来生成与生成对象方向对应的卷积神经网络(步骤s202)。
91.与在步骤s202中生成的生成对象方向对应的卷积神经网络响应于被输入表示上述的跨越第三基准时间的生成对象方向上的被实验者的加速度的随时间推移的数据这一情况,输出被实验者进行离地动作的概率。在y轴方向被设定为生成对象方向的情况下,在步骤s202的处理中,进行使用与y轴方向对应的cnn学习数据即包括多个y轴离地数据以及多个y轴非离地数据的y轴cnn学习数据作为示教数据的有监督学习,生成与y轴方向对应的
卷积神经网络。所生成的与y轴方向对应的卷积神经网络在被输入表示跨越第三基准时间的y轴方向上的被实验者的加速度的随时间推移的数据时,输出被实验者进行离地动作的概率。
92.另一方面,在z轴方向被设定为生成对象方向的情况下,在步骤s202的处理中,进行使用与z轴方向对应的cnn学习数据即包括多个z轴离地数据以及多个z轴非离地数据的z轴cnn学习数据作为示教数据的有监督学习,生成与z轴方向对应的卷积神经网络。所生成的与z轴方向对应的卷积神经网络在被输入表示跨越第三基准时间的z轴方向上的被实验者的加速度的随时间推移的数据时,输出被实验者进行离地动作的概率。
93.在步骤s202的处理中,作为与生成对象方向对应的卷积神经网络,生成1维卷积神经网络,该1维卷积神经网络具有:输入层,其受理表示跨越第三基准时间的生成对象方向上的被实验者的加速度的随时间推移的数据的输入;输出层,其输出被实验者进行离地动作的概率;以及中间层,其设置于输入层与输出层之间。在上述的中间层中包括:1维卷积层,其具有给定的第三基准数(在本实施方式中为20)的通道,对输入到输入层的加速度数据进行卷积处理;池化层,其具有多个通道,对1维卷积层的输出值进行最大池化等池化处理;以及全连接层,其对池化层的各通道的输出值进行加权相加并输出到输出层。在步骤s202的处理中,使用与生成对象方向对应的cnn学习数据作为示教数据,通过msgd(momentum stochastic gradient descent,动量随机梯度下降)等任意的方法,使上述的1维卷积层所具有的各通道的权重最佳化。
94.在执行步骤s202的处理后,cpu40取得在步骤s202中生成的与生成对象方向对应的卷积神经网络的1维卷积层所具有的上述的第三基准数的通道中随机选择的一个通道的卷积滤波器,作为与生成对象方向对应的预滤器,并存储到ram42(步骤s203)。即,在生成对象方向被设定为y轴方向的情况下,在步骤s203的处理中,取得在步骤s202中生成的与y轴方向对应的卷积神经网络的1维卷积层所具有的第三基准数的通道中的随机选择的一个通道的卷积滤波器,作为与y轴方向对应的预滤器即y轴预滤器。另一方面,在将生成对象方向设定为z轴方向的情况下,在步骤s203的处理中,取得在步骤s202中生成的与z轴方向对应的卷积神经网络的1维卷积层所具有的第三基准数的通道中的随机选择的一个通道的卷积滤波器,作为与z轴方向对应的预滤器即z轴预滤器。在步骤s203的处理中,将表示定义所选择的通道的卷积滤波器的系数即该通道的权重的数据作为表示预滤器的数据而存储于ram42。
95.在执行步骤s203的处理后,cpu40判定是否已经将y轴方向和z轴方向双方设定为生成对象方向完毕(步骤s204)。在判定为未将y轴方向和z轴方向中的任一方设定为生成对象方向的情况下(步骤s204;否),cpu40将y轴方向和z轴方向中的未被设定为生成对象方向的方向设定为生成对象方向(步骤s205),处理返回到步骤s202。
96.与此相对,在判定为y轴方向和z轴方向都已经设定为生成对象方向完毕的情况下(步骤s204;是),cpu40结束预滤器生成处理。这样,cpu40通过反复执行步骤s202~s204的处理直到判定为y轴方向和z轴方向中的双方已经设定为生成对象方向完毕(步骤s204;是),从而取得与y轴方向对应的y轴预滤器和与z轴方向对应的z轴预滤器双方。
97.检测装置2通过在与信息处理装置4之间进行使用了通信部25的通信,来从信息处理装置4取入通过信息处理装置4进行上述的预滤器生成处理而生成的y轴预滤器以及z轴
预滤器,并存储于在rom23的存储区域设置的预滤器存储部206。另外,在本实施方式中,说明了预滤器是卷积神经网络的1维卷积层所具备的多个通道中的一个卷积滤波器的情况,但这只不过是一例。预滤器可以是在用户进行离地动作时强调特征性的用户的加速度的推移波形的任意的滤波器。
98.接下来,对信息处理装置4的模板的生成进行说明。信息处理装置4通过执行图11的流程图所示的模板生成处理来生成模板。以下,对图11的流程图所示的模板生成处理进行说明。
99.在信息处理装置4的rom41中预先存储有cpu40用于生成模板的多个模板素材数据。在rom41中存储的多个模板素材数据中包括给定的第四基准数(在本实施方式中为150)的y轴模板素材数据和该第四基准数的z轴模板素材数据。
100.y轴模板素材数据是与y轴方向对应的模板素材数据,z轴模板素材数据是与z轴方向对应的模板素材数据。y轴模板素材数据表示被实验者进行离地动作的情况的y轴方向上的被实验者的加速度的随时间推移。具体而言,y轴模板素材数据按时间序列顺序包括多个采样点的数据,y轴模板素材数据所包括的一个采样点的数据表示在该一个采样点检测出的y轴方向上的被实验者的加速度。在y轴模板素材数据中,预先包括表示被实验者进行离地动作的定时的数据。z轴模板素材数据表示被实验者进行离地动作的情况的z轴方向上的被实验者的加速度的随时间推移。具体而言,z轴模板素材数据按时间序列顺序包括多个采样点的数据,z轴模板素材数据所包括的一个采样点的数据表示在该一个采样点检测出的z轴方向上的被实验者的加速度。在z轴模板素材数据中,预先包括表示被实验者进行离地动作的定时的数据。
101.以下,对y轴模板素材数据的生成方法进行说明。在本实施方式中,在将检测装置2的用户以外的多个人作为被实验者的实验中,进行在被实验者的腰装备了未图示的加速度传感器的状态下使被实验者进行奔跑动作的实验,根据表示由该加速度传感器检测出的被实验者在y轴方向上的加速度的随时间推移的数据,来生成y轴模板素材数据。具体而言,从上述的表示y轴方向上的被实验者的加速度的随时间推移的数据仅截取上述的第四基准数的从地面离开的被实验者的一个脚与地面接触的定时、与该定时之后与地面接触的被实验者的另一个脚离开地面后再次与地面接触的定时之间的时间区间中所包括的数据。在进行基于上述加速度传感器的被实验者的加速度的随时间推移的检测时,使被实验者在力板上进行奔跑动作,通过该力板检测被实验者的离地动作以及着地动作,由此检测被实验者的脚与地面接触的定时和被实验者的脚离开地面的定时。所截取的第四基准数的数据在分别被归一化以使得时间长度成为这些数据的时间长度的平均值之后,以上述的采样周期(在本实施方式中为200hz)进行重采样。之后,从进行重采样后的第四基准数的数据分别截取时间区间中所包括的数据,作为y轴模板素材数据,其中该时间区间将比被实验者进行离地动作的定时提前给定的第四基准时间(在本实施方式中为15ms)的定时作为起始端,将比被实验者进行离地动作的定时晚给定的第五基准时间(在本实施方式中为25ms)的定时作为末端。z轴模板素材数据是应用将上述的y轴模板素材数据的生成方法中的“y轴方向”置换为“z轴方向”的方法而生成的。另外,在本实施方式中,说明了在上述的实验中将检测装置2的用户以外的多个人作为被实验者的情况,但这只不过是一例。在上述的实验中,也可以将检测装置2的用户设为实验的被实验者,也可以将包括检测装置2的用户和检测装置2的用
户以外的一人以上的人在内的多个人作为被实验者。
102.在rom41中,除了上述的模板素材数据以外,还预先存储有用于供cpu40评价后述的模板的候补的试验数据。在rom41中存储有y轴试验数据和z轴试验数据,作为试验数据。y轴试验数据是与y轴方向对应的试验数据,z轴试验数据是与z轴方向对应的试验数据。y轴试验数据是表示被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移的数据,预先包括表示被实验者进行离地动作的定时的数据。z轴试验数据是表示被实验者进行离地动作的情况下的z轴方向上的被实验者的加速度的随时间推移的数据,预先包括表示被实验者进行离地动作的定时的数据。通过在将检测装置2的用户以外的多个人作为被实验者的实验中,在被实验者的腰装备有未图示的加速度传感器的状态下,使被实验者在力板上进行奔跑动作,通过该加速度传感器而对y轴方向以及z轴方向上的被实验者的加速度的随时间推移进行检测,并且通过该力板对被实验者进行离地动作的定时进行检测,由此生成y轴试验数据以及z轴试验数据。另外,在本实施方式中,说明了在上述的实验中将检测装置2的用户以外的多个人作为被实验者的情况,但这只不过是一例。在上述的实验中,也可以将检测装置2的用户设为实验的被实验者,也可以将包括检测装置2的用户和检测装置2的用户以外的一人以上的人在内的多个人作为被实验者。
103.在rom41中预先存储有模板素材数据以及试验数据的状态下,当作业员对信息处理装置4输入生成模板的指示时,cpu40开始图11的流程图所示的模板生成处理。
104.当开始模板生成处理时,cpu40首先随机地选择y轴方向和z轴方向中的任意一方,并设定为生成对象方向(步骤s301)。在执行步骤s301的处理后,cpu40作成与存储于rom41的生成对象方向对应的表示模板素材数据间的距离的距离矩阵(步骤s302)。在y轴方向被设定为生成对象方向的情况下,在步骤s302的处理中,作成与y轴方向对应的表示y轴模板素材数据间的距离的距离矩阵。在z轴方向被设定为生成对象方向的情况下,在步骤s302的处理中,作成与z轴方向对应的表示z轴模板素材数据间的距离的距离矩阵。
105.在步骤s302的处理中,cpu40通过使用动态时间伸缩法来取得模板素材数据间的距离,从而作成距离矩阵。以下,说明在步骤s302的处理中,cpu40使用动态时间伸缩法取得一个模板素材数据与其他模板素材数据之间的距离时的处理。cpu40首先作成表示一个模板素材数据的各采样点的数据与其他模板素材数据的各采样点的数据之间的距离的距离矩阵。此时,计算数据间的差分的绝对值作为数据间的距离。cpu40根据所作成的距离矩阵,求出表示一个模板素材数据与其他模板素材数据之间的对应关系的最佳路径,由此将该一个模板素材数据和该其他模板素材数据相互建立对应。然后,cpu40取得距离矩阵的要素中位于所求出的最佳路径上的要素的总和,作为一个模板素材数据与其他模板素材数据之间的距离。在步骤s302的处理中,cpu40通过反复执行与上述处理相同的处理,来分别针对与生成对象方向对应的模板素材数据取得与生成对象方向对应的其他所有模板素材数据之间的距离,作成距离矩阵。
106.在执行步骤s302的处理后,cpu40按照在步骤s302中生成的距离矩阵,使用k-means法,将与生成对象方向对应的模板素材数据进行聚类,由此分类为给定的第五基准数(在本实施方式中为5)的群组(步骤s303)。在执行步骤s303的处理之后,cpu40取得在步骤s303中被分类为第五基准数量的群组的与生成对象方向对应的模板素材数据中的、各群组的质心的模板素材数据,作为与生成对象方向对应的模板的候补(步骤s304)。
107.另外,在本实施方式中,说明在步骤s303的处理中,使用k-means法对模板素材数据进行聚类的例子,但这只不过是一例,模板素材数据的聚类能够使用任意的方法。例如,在步骤s303的处理中,也可以按照在步骤s302中生成的距离矩阵,使用k-medoids法对模板素材数据进行聚类。在这种情况下,在步骤s304的处理中,取得在步骤s303中被聚类的模板素材数据中的、各群组的medoid的模板素材数据,作为与生成对象方向对应的模板的候补即可。
108.在执行步骤s304的处理后,cpu40根据存储在rom41中的与生成对象方向对应的试验数据,来取得将在步骤s304中取得的模板的候补分别用在离地定时的检测中的情况下的离地定时的检测精度(步骤s305)。具体而言,在步骤s305的处理中,cpu40使用动态时间伸缩法,使与生成对象方向对应的试验数据和模板的候补相互建立对应。模板的候补都是模板素材数据,包括表示被实验者进行离地动作的定时的数据。cpu40将模板候补所示的被实验者进行离地动作的定时所对应的与生成对象方向对应的试验数据中的定时检测为离地定时。如上所述,试验数据包括表示被实验者进行离地动作的定时的数据。cpu40取得根据试验数据和模板的候补通过上述方法检测出的离地定时、与该试验数据所示的被实验者进行离地动作的定时的时间差,作为表示将该模板的候补用在离地定时的检测中的情况下的离地定时的检测精度的指标。上述时间差越小,离地定时的检测精度越高。
109.在执行步骤s305的处理后,cpu40通过对在步骤s304中取得的模板的候补中的在步骤s305中取得的离地定时的检测精度最高的模板的候补附加表示被实验者进行离地动作的定时的数据,来生成与生成对象方向对应的模板(步骤s306)。离地定时的检测精度最高的模板的候补是使用模板的候补检测出的离地定时与试验数据所示的进行离地动作的定时的时间差最小的模板的候补。被实验者进行离地动作的定时是比由上述方法生成的模板素材数据即模板的候补的起始端晚上述的第四基准时间的定时,是比模板的候补的末端提前上述第五基准时间的定时。在步骤s306的处理中,如果生成对象方向是y轴方向,则生成与y轴方向对应的y轴模板,如果生成对象方向是z轴方向,则生成与z轴方向对应的z轴模板。通过步骤s306的处理而生成的与生成对象方向对应的模板表示被实验者进行离地动作的情况下的生成对象方向上的被实验者的加速度的典型的随时间推移。
110.在执行步骤s306的处理后,cpu40判定是否已经将y轴方向和z轴方向双方设定为生成对象方向完毕(步骤s307)。在判定为未将y轴方向和z轴方向中的任一方设定为生成对象方向的情况下(步骤s307:否),cpu40将y轴方向和z轴方向中的未被设定为生成对象方向的方向设定为生成对象方向(步骤s308),处理返回到步骤s302。与此相对,在判定为y轴方向和z轴方向都已经设定为生成对象方向完毕的情况下(步骤s307:是),cpu40结束模板生成处理。这样,cpu40通过反复执行步骤s302~s307的处理直到判定为y轴方向和z轴方向中的双方已经设定为生成对象方向完毕(步骤s307:是),来生成与y轴方向对应的y轴模板和与z轴方向对应的z轴模板双方。
111.检测装置2通过在与信息处理装置4之间进行使用了通信部25的通信,从信息处理装置4取入通过信息处理装置4进行上述的模板生成处理而生成的y轴模板以及z轴模板,并存储于在rom23的存储区域设置的模板存储部205。
112.以下,参照图12~图15的流程图对具备上述的物理/功能性结构的检测装置2所执行的处理进行说明。另外,在图12~图15中,仅表示了检测装置2能够执行的处理中的与本
发明的特征部相关的处理。检测装置2能够执行图12~图15未示出的任意的处理。例如,检测装置2也可以执行控制上述显示装置的图像的显示的显示控制处理。
113.首先,参照图12的流程图,对检测装置2执行的控制处理进行说明。检测装置2通过在与信息处理装置4之间进行使用了通信部25的通信,来从信息处理装置4取入由信息处理装置4生成的离地类型估计器,并预先存储于在rom23的存储区域设置的估计器存储部203。此外,检测装置2通过与信息处理装置4之间进行使用了通信部25的通信,来从信息处理装置4取入由信息处理装置4生成的y轴模板以及z轴模板,并预先存储于在rom23的存储区域设置的模板存储部205。此外,检测装置2通过在与信息处理装置4之间进行使用了通信部25的通信,来从信息处理装置4取入由信息处理装置4生成的y轴预滤器以及z轴预滤器,并预先存储于在rom23的存储区域设置的预滤器存储部206。检测装置2通过腰带部21固定于用户的腰的中央部。在该状态下,当用户通过操作检测装置2的操作部26所具备的检测装置电源键来接通检测装置2的电源时,检测装置2的cpu22开始图12的流程图所示的控制处理。
114.当开始控制处理时,cpu22首先执行初始化处理(步骤s401)。在步骤s401的初始化处理中,cpu22清空ram24的存储内容。此外,在步骤s401的初始化处理中,cpu22进行将后述的输出处理中使用的各参数设定为给定的值的处理,然后,判定各参数是否实际被设定为该给定的值。在判定为各参数被设定为给定的值的情况下,处理进入步骤s402。在判定为参数被设定为与给定值不同的值的情况下,cpu22将参数重新设定为给定的值,处理进入步骤s402。
115.在执行步骤s401的处理之后,cpu22开始后述的输出处理的中断(步骤s402)。以后,cpu22每当基于从计时部27输入的计时信号检测到经过了给定的中断周期(在本实施方式中为1.5s),就将输出处理中断,反复执行输出处理,直到在后述的步骤s406的处理中停止输出处理的中断为止。稍后将描述输出处理的细节。
116.在执行步骤s402的处理后,加速度数据取得部200根据从加速度传感器28a输入的加速度信号,来取得表示用户的加速度的随时间推移的加速度数据(步骤s403)。在步骤s403的处理中,加速度数据取得部200使用卡尔曼滤波器,根据从加速度传感器28a输入的加速度信号所表示的加速度的检测结果、和从角速度传感器28b输入的角速度信号所表示的角速度的检测结果来估计铅垂方向以及用户的行进方向,由此将由加速度传感器28a检测出的传感器坐标系中的加速度的值变换为由上述的xyz坐标轴定义的世界坐标系中的加速度的值。加速度数据取得部200通过以给定的采样频率(在本实施方式中为200hz)对变换后的加速度的值进行采样来取得加速度数据。在步骤s403中取得的加速度数据包括x轴加速度数据、y轴加速度数据以及z轴加速度数据。在执行步骤s403的处理后,加速度数据取得部200将在步骤s403中取得的加速度数据存储到加速度数据存储部201中(步骤s404)。
117.在执行步骤s404的处理后,cpu22判定给定的输出结束条件是否成立(步骤s405)。在本实施方式中,在用户通过操作上述的检测装置电源键断开检测装置2的电源时,输出结束条件成立。另外,这只不过是一例,输出结束条件能够任意设定。例如,也可以设定为在控制处理的执行中发生了错误时,输出结束条件成立。在步骤s405的处理中,在判定为输出结束条件不成立的情况下(步骤s405:否),处理返回到步骤s403。
118.另一方面,在判定为输出结束条件成立的情况下(步骤s405:是),cpu22停止输出处理的中断(步骤s406),结束控制处理。通过这样的结构,在判定为输出结束条件成立(步
骤s405:是)之前,反复执行步骤s403以及步骤s404的处理,每当从加速度传感器28a输入加速度信号时,就取得与该加速度信号对应的加速度数据,并蓄积于加速度数据存储部201。
119.以下,参照图13的流程图对上述的输出处理的详细情况进行说明。
120.当开始输出处理时,cpu22首先执行定时检测处理,由此检测离地定时(步骤s501)。稍后将描述定时检测处理的细节。在执行步骤s501的处理后,定时检测部204将表示在步骤s501中检测出的离地定时的数据追加到存储于离地定时信息存储部207的离地定时信息,由此更新离地定时信息(步骤s502)。在执行步骤s502的处理后,奔跑动作信息取得部208基于在步骤s502中更新后的离地定时信息,来取得表示上述的平均离地间隔的奔跑动作信息(步骤s503)。在执行步骤s503的处理后,奔跑动作信息输出部209控制通信部25,使其向终端装置3发送在步骤s503中取得的奔跑动作信息(步骤s504),结束输出处理。
121.以下,参照图14的流程图对在输出处理的步骤s501中执行的定时检测处理的详细情况进行说明。
122.当开始定时检测处理时,首先,奔跑动作识别部202从加速度数据存储部201读出与从比当前时刻提前上述中断周期的时刻到当前时刻为止的时间区间即处理期间对应的加速度数据(步骤s601)。在步骤s601中读出的加速度数据是与从上次的定时检测处理开始到本次的定时检测处理开始为止的期间对应的加速度数据。在步骤s601中读出的加速度数据中包括x轴加速度数据、y轴加速度数据以及z轴加速度数据。
123.奔跑动作识别部202通过对在步骤s601中读出的加速度数据所包括的z轴加速度数据进行二次积分,来取得表示z轴方向上的用户的腰的位置的随时间推移的z轴位置数据(步骤s602)。在步骤s602的处理中,取得表示上述的处理期间中的z轴方向的用户的腰的位置的随时间推移的z轴位置数据。在执行步骤s602的处理后,奔跑动作识别部202对在步骤s602中取得的z轴位置数据进行使用了移动平均滤波器的平滑化处理(步骤s603)。在执行步骤s603的处理后,奔跑动作识别部202根据在步骤s603中实施了平滑化处理后的z轴位置数据,来在z轴方向上的用户的腰的位置的随时间推移中检测用户的腰的位置成为极大值的第一极大值定时和接着第一极大值定时之后用户的腰的位置成为极大值的第二极大值定时(步骤s604)。在步骤s604的处理中,在上述的处理期间中的z轴方向的用户的腰的位置的随时间推移中,将用户的腰的位置最初成为极大值的定时检测为第一极大值定时。
124.在执行步骤s604的处理后,奔跑动作识别部202通过将在步骤s601中读出的加速度数据所示的、比在步骤s604中检测出的与第二极大值定时提前第一基准时间(在本实施方式中为500ms)的定时的x轴方向、y轴方向以及z轴方向的用户的加速度作为特征量输入到由估计器存储部203存储的离地类型估计器,来使离地类型估计器估计与离地定时对应的基准比率是否小于识别阈值(在本实施方式中为0.95)(步骤s605)。
125.在执行步骤s605的处理后,奔跑动作识别部202判定在步骤s605中基准比率是否被估计为小于识别阈值(步骤s606)。在判定为估计为基准比率小于识别阈值的情况下(步骤s606:是),奔跑动作识别部202将用户的奔跑动作识别为第一奔跑动作(步骤s607)。在执行步骤s607的处理后,定时检测部204将y轴方向设定为检测对象方向(步骤s608)。另一方面,在步骤s606的处理中,在判定为估计基准比率为识别阈值以上的情况下(步骤s606:否),奔跑动作识别部202将用户的奔跑动作识别为第二奔跑动作(步骤s609)。在执行步骤s609的处理后,定时检测部204将z轴方向设定为检测对象方向(步骤s610)。
126.在执行步骤s608或者步骤s610的处理后,定时检测部204针对与在步骤s608或者步骤s610中设定的检测对象方向对应的加速度数据,使用预滤器存储部206中存储的y轴预滤器以及z轴预滤器中的与该检测对象方向对应的预滤器,来进行预滤器处理(步骤s611)。在步骤s608中将y轴方向设定为检测对象方向的情况下,在步骤s611的处理中,使用与y轴方向对应的y轴预滤器对与y轴方向对应的y轴加速度数据进行预滤器处理。在步骤s610中将z轴方向设定为检测对象方向的情况下,在步骤s611的处理中,使用与z轴方向对应的z轴预滤器对与z轴方向对应的z轴加速度数据进行预滤器处理。在执行步骤s611的处理后,定时检测部204从在步骤s611中实施了预滤器处理后的与检测对象方向对应的加速度数据中,截取属于从在步骤s604中检测出的第一极大值定时到第二极大值定时为止的范围的加速度数据,并对所截取的加速度数据进行归一化(步骤s612)。在步骤s612的处理中,将所截取的加速度数据所表示的加速度归一化为-10至10的范围,并且将该加速度数据所表示的从第一极大值定时至第二极大值定时为止的时间范围归一化为0至100的范围。
127.在执行步骤s612的处理后,定时检测部204通过执行动态时间伸缩处理,来使用动态时间伸缩法,将在步骤s612中截取出并归一化后的与检测对象方向对应的加速度数据和与检测对象方向对应的模板相互建立对应,由此检测离地定时(步骤s613),结束定时检测处理。在步骤s607的处理中,在由奔跑动作识别部202识别出用户的奔跑动作是第一奔跑动作的情况下(步骤s607),将y轴方向设定为检测对象方向(步骤s608),在步骤s613的处理中,根据与作为检测对象方向的y轴方向对应的y轴加速度数据和与y轴方向对应的y轴模板来检测离地定时。即,在识别为用户的奔跑动作是第一奔跑动作的情况下(步骤s607),使用第一检测方法进行离地定时的检测。与此相对,在步骤s609的处理中,在由奔跑动作识别部202识别出用户的奔跑动作为第二奔跑动作的情况下(步骤s609),将z轴方向设定为检测对象方向(步骤s610),在步骤s613的处理中,根据与作为检测对象方向的z轴方向对应的z轴加速度数据和与z轴方向对应的z轴模板来检测离地定时。即,在识别为用户的奔跑动作是第二奔跑动作的情况下(步骤s609),使用第二检测方法进行离地定时的检测。
128.以下,参照图15的流程图对在定时检测处理的步骤s613中执行的动态时间伸缩处理的详细情况进行说明。
129.当开始动态时间伸缩处理时,定时检测部204首先在图14的流程图的步骤s612中截取并归一化后的加速度数据中,根据在步骤s604中检测出的第一极大值定时以及第二极大值定时来设定搜索区间(步骤s701)。在步骤s701的处理中,将从比第二极大值定时提前第二基准时间的定时到第二极大值定时的区间设定为搜索区间。第二基准时间是在从第一极大值定时到第二极大值定时为止的时间上乘以上述的基准乘数(在本实施方式中为0.5)而得到的时间。
130.在执行步骤s701的处理后,定时检测部204将在步骤s701中设定的搜索区间的起始端的采样点设定为数据侧对象位置(步骤s702)。在执行步骤s702的处理后,定时检测部204将与在图14的流程图的步骤s608或者步骤s610中设定的检测对象方向对应的模板的起始端的采样点设定为模板侧对象位置(步骤s703)。
131.在执行步骤s703的处理后,定时检测部204计算在步骤s612中截取并归一化后的与检测对象方向对应的加速度数据所包括的数据中的与数据侧对象位置对应的数据、和与检测对象方向对应的模板所包括的数据中的与模板侧对象位置对应的数据之间的距离,并
将表示计算出的距离的数据存储于ram24的给定区域(步骤s704)。在步骤s704的处理中,计算数据间的差分的绝对值作为数据间的距离。此外,在步骤s704的处理中,将表示计算出的距离的数据、和表示当前设定的数据侧对象位置和当前设定的模板侧对象位置的数据建立对应地存储。
132.在执行步骤s704的处理后,定时检测部204判定当前设定的模板侧对象位置是否是与检测对象方向对应的模板的末端的采样点(步骤s705)。在判定为当前设定的模板侧对象位置是与检测对象方向对应的模板的末端的采样点的情况下(步骤s705:是),处理进入步骤s706。另一方面,在判定为当前设定的模板侧对象位置不是与检测对象方向对应的模板的末端的采样点的情况下(步骤s705:否),定时检测部204使模板侧对象位置向与检测对象方向对应的模板中的当前设定的模板侧对象位置的下一个采样点移位(步骤s710),处理返回到步骤s704。定时检测部204在判定当前设定的模板侧对象位置是与检测对象方向对应的模板的末端的采样点(步骤s705:是)之前,一边使模板侧对象位置移位(步骤s710),一边反复执行步骤s704以及步骤s705的处理,由此计算在步骤s701中设定的搜索区间中所包括的加速度数据中当前设定的数据侧对象位置的数据与与检测对象方向对应的模板的全部采样点各自的数据之间的距离,并蓄积到ram24的给定区域。
133.在步骤s706的处理中,定时检测部204判定当前设定的数据侧对象位置是否是在步骤s701中设定的搜索区间的末端的采样点(步骤s706)。在判定为当前设定的数据侧对象位置是搜索区间的末端的采样点的情况下(步骤s706:是),处理进入步骤s707。另一方面,在判定为当前设定的数据侧对象位置不是搜索区间的末端的采样点的情况下(步骤s706:否),定时检测部204使数据侧对象位置向搜索区间中所包括的加速度数据中的当前设定的数据侧对象位置的下一个采样点移位(步骤s711),处理返回到步骤s703。定时检测部204判定当前设定的数据侧对象位置是搜索区间的末端的采样点(步骤s706:是),一边使数据侧对象位置移位(步骤s711),一边反复执行步骤s703~步骤s706的处理,由此计算搜索区间中所包括的加速度数据的全部采样点各自的数据与与检测对象方向对应的模板的全部采样点各自的数据之间的距离,并蓄积于ram24的给定区域。
134.在步骤s707的处理中,定时检测部204根据通过反复执行步骤s704的处理而蓄积于ram24的给定区域的、表示搜索区间中所包括的加速度数据的各采样点的数据与与检测对象方向对应的模板的各采样点的数据之间的距离的数据,来生成表示搜索区间中所包括的加速度数据的各采样点的数据与与检测对象方向对应的模板的各采样点的数据之间的距离的距离矩阵(步骤s707)。
135.在执行步骤s707的处理后,定时检测部204根据在步骤s707中生成的距离矩阵,来求出表示搜索区间中所包括的加速度数据与与检测对象方向对应的模板之间的对应关系的最佳路径,由此使该加速度数据和该模板相互建立对应(步骤s708)。在步骤s708的处理中,求取在步骤s707中作成的距离矩阵上的如下路径当中位于路径上的该距离矩阵的要素的总和最小的路径作为最佳路径,其中,上述路径将表示加速度数据所包括的数据中的与搜索区间的起始端对应的数据与与检测对象方向对应的模板所包括的数据中的与模板的起始端对应的数据之间的距离的该距离矩阵的要素作为起始端,将表示加速度数据所包括的数据中的与搜索区间的末端对应的数据与该模板所包括的数据中的与模板的末端对应的数据之间的距离的该距离矩阵的要素作为末端。
136.在执行步骤s708的处理后,定时检测部204将与检测对象方向对应的模板所示的与被实验者进行离地动作的定时对应的加速度数据中的定时检测为离地定时(步骤s709),结束动态时间伸缩处理。
137.接下来,参照图16的流程图对具备上述的物理/功能性结构的终端装置3所执行的提示处理进行说明。另外,在图16中,仅表示终端装置3能够执行的处理中的与本发明的特征部相关的处理。终端装置3能够执行图16所示的任意的处理。例如,终端装置3也可以执行控制上述扬声器的声音输出的声音输出控制处理。
138.以下,在检测装置2装备于用户的腰的状态下将检测装置2的电源设定为接通,检测装置2在上述的每个中断周期执行上述的输出处理,由此将奔跑动作信息向终端装置3发送,以此情况为例进行说明。在该状态下,当用户通过操作终端装置3的操作部34所具备的触摸面板而向终端装置3输入使奔跑动作信息的提示开始的指示时,终端装置3的cpu30就开始图16的流程图所示的提示处理。
139.当开始提示处理时,首先,奔跑动作信息接收部300控制通信部33,使其接收按照奔跑动作信息输出部209而从检测装置2的通信部25发送的奔跑动作信息(步骤s801)。在执行步骤s801的处理后,奔跑动作信息提示部301进行使显示部35显示与在步骤s801中接收到的奔跑动作信息对应的奔跑动作信息图像的奔跑动作信息图像显示控制(步骤s802)。在显示部35已经显示了奔跑动作信息图像的情况下,在步骤s802中执行奔跑动作信息图像显示控制,由此,由显示部35当前显示的奔跑动作信息图像被更新为与在步骤s801中接收到的奔跑动作信息对应的新的奔跑动作信息图像。
140.在执行步骤s802的处理后,cpu30判定给定的提示结束条件是否成立(步骤s803)。在本实施方式中,在用户通过操作终端装置3的操作部34所具备的触摸面板来向终端装置3输入了结束奔跑动作信息的提示的指示时,提示结束条件成立。另外,这只不过是一例,提示结束条件能够任意设定。例如,也可以设定为,在用户通过操作操作部34所具备的终端装置电源键来断开终端装置3的电源时,提示结束条件成立。或者,也可以设定为,在通信部33不从检测装置2接收奔跑动作信息而经过了给定的时间(例如10分钟)时,提示结束条件成立。在步骤s803的处理中,在判定为提示结束条件不成立的情况下(步骤s803:否),处理返回到步骤s801。另一方面,在判定为提示结束条件成立的情况下(步骤s803:是),cpu30结束提示处理。通过这样的结构,cpu30在判定为提示结束条件成立(步骤s803:是)之前,反复执行步骤s801~s803的处理,每当从检测装置2接收到奔跑动作信息时,就更新由显示部35显示的奔跑动作信息图像。
141.如以上说明的那样,定时检测部204在用户的奔跑动作是第一奔跑动作的情况下,使用第一检测方法检测离地定时,在用户的奔跑动作是第二奔跑动作的情况下,使用第二检测方法检测离地定时。定时检测部204使用第一检测方法检测离地定时的情况下的检测对象方向以及检测中使用的模板、和定时检测部204使用第二检测方法检测离地定时的情况下的检测对象方向以及检测中使用的模板分别相互不同。根据这样的结构,能够提高离地定时的检测精度。
142.此外,定时检测部204使用动态时间伸缩法,将与检测对象方向对应的加速度数据和与检测对象方向对应的模板相互建立对应,将该模板所示的与被实验者进行离地动作的定时对应的该加速度数据中的定时检测为离地定时。根据这样的结构,能够相对于用户的
奔跑速度的偏差而对强健进行离地定时的检测,提高离地定时的检测精度。
143.此外,定时检测部204通过使用动态时间伸缩法,将与检测对象方向对应的加速度数据中的含在搜索区间中的数据和与检测对象方向对应的模板相互建立对应,来检测离地定时。根据这样的结构,能够减轻计算负担,并且能够提高离地定时的检测精度。
144.此外,定时检测部204在使用第一检测方法检测离地定时的情况下,根据y轴模板检测离地定时,在使用第二检测方法检测离地定时的情况下,根据z轴模板检测离地定时。根据这样的结构,能够根据用户的奔跑动作的种类使用适当的模板来检测离地定时,提高离地定时的检测精度。
145.此外,定时检测部204在使用第一检测方法检测离地定时的情况下,根据y轴加速度数据检测离地定时,在使用第二检测方法检测离地定时的情况下,根据z轴加速度数据检测离地定时。根据这样的结构,能够根据用户的奔跑动作的种类,使用与适当的检测对象方向对应的加速度数据来检测离地定时,提高离地定时的检测精度。
146.此外,定时检测部204在由奔跑动作识别部202识别出用户的奔跑动作是第一奔跑动作的情况下,使用第一检测方法检测离地定时,在由奔跑动作识别部202识别出用户的奔跑动作是第二奔跑动作的情况下,使用第二检测方法检测离地定时。根据这样的结构,能够根据用户的奔跑动作的种类,使用适当的检测方法来检测离地定时,提高离地定时的检测精度。
147.此外,奔跑动作识别部202根据基准比率与识别阈值的大小关系,来识别用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个。根据这样的结构,能够提高用户的奔跑动作的类别的识别精度,并根据用户的奔跑动作的种类,使用适当的检测方法来检测离地定时,提高离地定时的检测精度。
148.此外,奔跑动作信息取得部208根据由定时检测部204检测出的离地定时来取得奔跑动作信息,奔跑动作信息输出部209输出由奔跑动作信息取得部208取得的奔跑动作信息。根据这样的结构,能够提高奔跑动作信息的准确性,提高对于用户而言的便利性。
149.以上,对本发明的实施方式进行了说明,但本发明并不限定于上述实施方式,在不脱离本发明的主旨的范围内能够进行各种变更。
150.例如,在上述实施方式中,说明了第一奔跑动作是用户以成人的平均跑步速度即第一基准速度跑步的情况下的奔跑动作,第二奔跑动作是用户以比该第一基准速度慢的第二基准速度跑步的情况下的奔跑动作,但这只不过是一例。第一奔跑动作和第二奔跑动作可以是互不相同的任意的奔跑动作。例如可以,第一奔跑动作是用户进行50米跑、100米跑等短距离跑的情况下的奔跑动作,第二奔跑动作是用户进行半马、全马等长距离跑的情况下的奔跑动作。
151.在上述实施方式中,说明了第一移动动作的一例是第一奔跑动作、第二移动动作的一例是第二奔跑动作的情况,但这只不过是一例,也可以第一移动动作是奔跑动作,第二移动动作是步行动作。
152.在上述实施方式中,说明了在定时检测部204使用第一检测方法检测离地定时的情况、和定时检测部204使用第二检测方法检测离地定时的情况下,检测对象方向和在离地定时的检测中使用的模板双方不同的情况。然而,这只不过是一个例子,也可以构成为,在定时检测部204使用第一检测方法检测离地定时的情况、和定时检测部204使用第二检测方
法检测离地定时的情况下,仅使检测对象方向和在离地定时的检测中使用的模板中的某一方不同。
153.例如,也可以构成为,在定时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,在离地定时的检测中使用的模板相互不同,另一方面,检测对象方向相互相同。
154.以下,说明不管在定时检测部204使用第一检测方法和第二检测方法中的哪一个检测离地定时的情况下都将y轴方向设定为检测对象方向来进行检测的变形例进行说明。在本变形例中,在模板存储部205中,作为模板,预先存储有:第一奔跑动作模板,其表示通过进行第一奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移;以及第二奔跑动作模板,其表示通过进行第二奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移。在第一奔跑动作模板及第二奔跑动作模板中分别包括表示被实验者进行离地动作的定时的数据。第一奔跑动作模板是第一基准数据的一例,第二奔跑动作模板是第二基准数据的一例。
155.第一奔跑动作模板以及第二奔跑动作模板在由信息处理装置4生成后,被取入检测装置2,并预先存储于模板存储部205。信息处理装置4使用表示通过进行第一奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移的数据作为模板素材数据,来执行与上述实施方式的模板生成处理相同的处理,由此生成第一奔跑动作模板。通过这样的方法生成的第一奔跑动作模板表示通过进行第一奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的典型的随时间推移。此外,信息处理装置4通过使用表示通过进行第二奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移的数据作为模板素材数据,来执行与上述实施方式的模板生成处理相同的处理,从而生成第二奔跑动作模板。通过这样的方法生成的第二奔跑动作模板表示通过进行第二奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的典型的随时间推移。
156.定时检测部204在使用第一检测方法检测离地定时的情况下,使用第一奔跑动作模板进行检测,另一方面,在使用第二检测方法检测离地定时的情况下,使用第二奔跑动作模板进行检测。即,定时检测部204在使用第一检测方法检测离地定时的情况下,使用动态时间伸缩法来将与作为检测对象方向的y轴方向对应的y轴加速度数据和第一奔跑动作模板相互建立对应,将第一奔跑动作模板所示的与被实验者进行离地动作的定时对应的y轴加速度数据中的定时检测为离地定时。与此相对,定时检测部204在使用第二检测方法检测离地定时的情况下,使用动态时间伸缩法来将与作为检测对象方向的y轴方向对应的y轴加速度数据和第二奔跑动作模板相互建立对应,将第二奔跑动作模板所示的与被实验者进行离地动作的定时对应的y轴加速度数据中的定时检测为离地定时。根据这样的结构,通过根据用户的奔跑动作的种类使用适当的模板进行离地定时的检测,能够提高离地定时的检测精度。
157.另外,在本变形例中,说明了在第一检测方法和第二检测方法中的哪一个中,y轴方向都被设定为检测对象方向的情况,但这只不过是一例。也可以在第一检测方法和第二检测方法中的哪一方法中都将z轴方向设定为检测对象方向。这样的变形例能够通过将上述的变形例中的“y轴方向”置换为“z轴方向”来实现。
158.以上,说明了在定时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,在离地定时的检测中使用的模板相互不同,另一方面,检测对象方向彼此相同的变形例,但这只不过是一例。也可以构成为,在定时检测部204使用第一检测方法检测离地定时的情况和定时检测部204使用第二检测方法检测离地定时的情况下,检测对象方向相互不同,另一方面,在离地定时的检测中使用的模板彼此相同。
159.以下,说明不管在定时检测部204使用第一检测方法和第二检测方法中的哪一个检测离地定时的情况下都使用相同的共用模板进行检测的变形例。在本变形例中,在模板存储部205中,作为模板,预先存储有表示通过进行奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向以及z轴方向上的被实验者的加速度的随时间推移的共用模板。共用模板包括表示被实验者进行离地动作的定时的数据。
160.共用模板在由信息处理装置4生成后,被取入检测装置2,并预先存储在模板存储部205中。信息处理装置4使用表示通过进行奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向上的被实验者的加速度的随时间推移的数据、和表示通过进行奔跑动作而移动的被实验者进行离地动作的情况下的z轴方向上的被实验者的加速度的随时间推移的数据作为模板素材数据,来执行与上述实施方式的模板生成处理同样的处理,由此生成共用模板。通过这样的方法生成的共用模板表示通过进行奔跑动作而移动的被实验者进行离地动作的情况下的y轴方向和z轴方向上的被实验者的加速度的典型的随时间推移。
161.定时检测部204在使用第一检测方法检测离地定时的情况下,将y轴方向设定为检测对象方向来进行检测,另一方面,在使用第二检测方法检测离地定时的情况下,将z轴方向设定为检测对象方向来进行检测。即,定时检测部204在使用第一检测方法检测离地定时的情况下,使用动态时间伸缩法来将与作为检测对象方向的y轴方向对应的y轴加速度数据和共用模板相互建立对应,将共同模板所示的与被实验者进行离地动作的定时对应的y轴加速度数据中的定时检测为离地定时。与此相对,定时检测部204在使用第二检测方法检测离地定时的情况下,使用动态时间伸缩法来将与作为检测对象方向的z轴方向对应的z轴加速度数据和共用模板相互建立对应,将共用模板所示的与被实验者进行离地动作的定时对应的z轴加速度数据中的定时检测为离地定时。根据这样的结构,通过根据用户的奔跑动作的种类将适当的方向设定为检测对象方向来进行离地定时的检测,能够提高离地定时的检测精度。此外,根据这样的结构,不需要按每个检测方法存储不同的模板,因此能够减轻存储负担。进而,根据这样的结构,不需要按每个检测方法生成不同的模板,因此能够降低检测装置2的制造成本。
162.在上述实施方式中,说明了定时检测部204根据由奔跑动作识别部202进行的用户的奔跑动作的识别结果并使用第一检测方法和第二检测方法中的任一个来检测离地定时的情况,但这只不过是一例。检测装置2不识别用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个就能够使用与用户的奔跑动作的种类相应的检测方法来检测离地定时。
163.具体而言,以下,说明定时检测部204使用第一检测方法和第二检测方法这两者,检测作为离地定时的候补的两个候补定时,将该两个候补定时中的任意一个决定为离地定时的变形例。
164.在本变形例中,定时检测部204使用第一检测方法,检测作为离地定时的一个候补
的第一候补定时。具体而言,定时检测部204生成表示第一检测方法中的与作为检测对象方向的y轴方向对应的y轴加速度数据的各采样点的数据和与y轴方向对应的y轴模板的各采样点的数据之间的距离的距离矩阵,使用动态时间伸缩法,根据该距离矩阵求出表示y轴加速度数据与y轴模板之间的对应关系的最佳路径,由此将y轴加速度数据和y轴模板相互建立对应,将y轴模板所示的与被实验者进行离地动作的定时对应的y轴加速度数据中的定时检测为第一候补定时。进而,定时检测部204取得位于所求出的最佳路径上的距离矩阵的要素的总和,作为表示y轴加速度数据与y轴模板之间的类似度的指标。
165.定时检测部204使用第二检测方法,检测作为离地定时的其他候补的第二候补定时。具体而言,定时检测部204生成表示第二检测方法中的与作为检测对象方向的z轴方向对应的z轴加速度数据的各采样点的数据和与z轴方向对应的z轴模板的各采样点的数据之间的距离的距离矩阵,使用动态时间伸缩法,根据该距离矩阵求出表示z轴加速度数据与z轴模板之间的对应关系的最佳路径,由此将z轴加速度数据与z轴模板相互建立对应,将与z轴模板所示的被实验者进行离地动作的定时对应的z轴加速度数据中的定时检测为第二候补定时。进而,定时检测部204取得位于所求出的最佳路径上的距离矩阵的要素的总和,作为表示z轴加速度数据与z轴模板之间的类似度的指标。
166.定时检测部204根据与检测对象方向对应的加速度数据与与检测方向对应的模板之间的类似度,将使用第一检测方法检测到的第一候补定时和使用第二检测方法检测到的第二候补定时中的任意一个决定为离地定时。在本变形例中,将通过动态时间伸缩法求得的表示与检测方向对应的加速度数据与与检测方向对应的模板之间的对应关系的最佳路径上的距离矩阵的要素的总和用作表示该加速度数据与该模板之间的类似度的指标。表示加速度数据与模板之间的对应关系的最佳路径上的要素的总和越小,该加速度数据与该模板之间的类似度越高。
167.具体而言,定时检测部204在表示y轴加速度数据与y轴模板之间的对应关系的最佳路径上的距离矩阵的要素的总和比表示z轴加速度数据与z轴模板之间的对应关系的最佳路径上的距离矩阵的要素的总和小的情况下,即y轴加速度数据与y轴模板的类似度比z轴加速度数据与z轴模板的类似度高的情况下,将通过第一检测方法检测到的第一候补定时决定为离地定时。另一方面,在表示y轴加速度数据与y轴模板之间的对应关系的最佳路径上的距离矩阵的要素的总和为表示z轴加速度数据与z轴模板之间的对应关系的最佳路径上的距离矩阵的要素的总和以上的情况下,即y轴加速度数据与y轴模板的类似度是z轴加速度数据与z轴模板的类似度以下的情况下,定时检测部204将通过第二检测方法检测出的第二候补定时决定为离地定时。
168.在用户的奔跑动作为第一奔跑动作的情况下,y轴加速度数据与y轴模板的类似度比z轴加速度数据与z轴模板的类似度高。因此,在用户的奔跑动作为第一奔跑动作的情况下,由定时检测部204将通过第一检测方法检测出的第一候补定时决定为离地定时。换言之,在用户的奔跑动作为第一奔跑动作的情况下,定时检测部204使用第一检测方法检测离地定时。在用户的奔跑动作为第二奔跑动作的情况下,z轴加速度数据与z轴模板的类似度比y轴加速度数据与y轴模板的类似度高。因此,在用户的奔跑动作为第二奔跑动作的情况下,由定时检测部204将通过第二检测方法检测出的第二候补定时决定为离地定时。换言之,在用户的奔跑动作为第二奔跑动作的情况下,定时检测部204使用第二检测方法来检测
离地定时。
169.如以上说明的那样,根据本变形例的结构,不识别用户的奔跑动作是第一奔跑动作和第二奔跑动作中的哪一个,就能够使用与用户的奔跑动作的种类相应的适当的检测方法来检测离地定时,从而提高离地定时的检测精度。根据这样的结构,能够降低错误地识别用户的奔跑动作的种类、使用与错误地识别出的奔跑动作的种类相应的检测方法进行离地定时的检测、由此离地定时的检测精度降低的可能性。
170.另外,能够将预先具备用于实现本发明所涉及的各功能的结构的专用的测定装置作为本发明所涉及的测定装置来提供,也能够通过程序的应用而使已有的测定装置作为本发明所涉及的测定装置发挥功能。即,通过将用于实现本发明所涉及的测定装置的各功能的程序应用为控制现有的测定装置的cpu等处理器能够执行,能够使该现有的测定装置作为本发明所涉及的测定装置发挥功能。
171.另外,这种程序的应用方法是任意的。可以将程序保存在例如软盘、cd(compact disc,光盘)-rom、dvd(digital versatile disc,数字多功能盘)-rom、存储卡等计算机可读取的存储介质中来应用。进而,也可以将程序叠加在载波上,经由互联网等通信介质来应用。例如,也可以在通信网络上的(bbs:bulletin board system,电子布告栏)上布告程序进行分发。而且,也可以构成为,启动该程序,在os(operating system:操作系统)的控制下,与其他应用程序同样地执行,由此能够执行上述的处理。
172.以上,对本发明的优选实施方式进行了说明,但本发明并不限定于上述特定的实施方式,本发明包括权利要求书所记载的发明及其等同的范围。以下,附记本技术的最初的权利要求书所记载的发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1