上肢瘫痪患者康复用智能外骨骼的制作方法
1.本发明涉及医学肢体功能残疾及康复领域,具体涉及一种上肢瘫痪患者康复用智能外骨骼。
背景技术:
2.随着生活方式的改变及人口老龄化进展加剧,因脑卒中、脑外伤、脊髓损伤、骨折等疾病造成的肢体瘫痪也日益增多。上肢瘫痪甚至无法独自完成喝水、进食、穿衣、洗漱等基本的活动,严重影响患者的自理能力,增加患者家庭及社会的经济和精神负担。随着经济发展及技术进步,目前瘫痪肢体,特别是上肢的运动协助及康复已经成为国内外研究的重点。
3.随着脑卒中发病率增加,致残的肢体运动障碍患者越来越多,带给患者家庭及社会的经济成本也越来越高,严重影响患者本人及其家庭的生活质量并且带来巨大的精神负担。目前,对上肢瘫痪患者缺乏有效的药物治疗及康复技术。对于新发脑卒中患者,大多采用康复师手工康复,或者在医院使用笨拙、功能单一的康复设施进行被动康复。现阶段,上肢康复设备主要应用于医院,设备普遍存在体积较大、质量大、运动灵活性差、患者不可便携穿戴和治疗费用高等问题。瘫痪患者采用上肢康复设备进行肢体康复大多采用被动运动,不能进行主动运动。患者出院后肢体运动功能产生损失,需要人工护理及协助完善生存必须的基本生理需求活动。随着国民收入增长和国民医疗保健意识提高,现有康复设备和治疗方案已无法满足患者及医院的使用需求,医疗康复市场资源矛盾突出。
4.随着技术的快速进步,特别是康复设备相关的传感器及材料技术的发展对残存肢体瘫痪患者的康复带来了新的方法及希望。目前国内外实验室和研究所对相关技术进行研究,近年来采用气动或者线缆驱动的方式对手部进行被动康复的康复设备已经在医院使用。现阶段市场上仍缺乏能主动活动整个瘫痪上肢(包括肩关节、上臂、肘关节、前臂、腕关节及手部)的设备,难以适应不同康复阶段患者的运动恢复需求。特别是能替代瘫痪上肢运动功能,辅助完成患者日常基本活动的智能穿戴式外骨骼机器人。
技术实现要素:
5.技术问题:设计一种上肢瘫痪患者康复用安全、可靠及可穿戴的智能外骨骼,通过多传感器融合技术使外骨骼能够识别患者运动意图,采用电机驱动线缆技术实现患者上肢肩关节外展/内收、肘关节伸展/弯曲、腕关节旋内/旋外、手部弯曲/伸缩运动,在疾病早期对瘫痪上肢进行康复为主,后期通过采取外骨骼主动运动等多种康复运动模式协助患者日常基本活动,减少陪护,提高患者本人及其家庭的生活质量。
6.技术方案:本发明提供一种上肢瘫痪患者康复用智能外骨骼,包括手部运动组件、腕关节运动组件、前臂固定组件、肘关节运动组件、上臂固定组件、肩关节运动组件、固定背架、背部调节组件、肩关节驱动线缆组件、肘关节驱动线缆组件、驱动控制组件、手部驱动线缆组件和腕关节驱动线缆组件,所述手部运动组件(1)穿戴在病患手部,用于完成病患手指
屈伸及抓握物体动作;所述腕关节运动组件固定在病患腕关节部位,主要用于完成病患腕关节旋前、旋后动作;所述前臂固定组件主要用于固定病患上肢前臂部位;所述肘关节运动组件主要用于完成病患肘部屈伸动作;所述上臂固定组件主要用于固定病患上肢上臂部位;所述背部调节组件和肩关节运动组件固定在病患肩部,主要用于完成病患肩部前屈后伸及外展内收动作;所述固定背架主要用于各关节运动组件及驱动控制组件的固定;所述手部驱动线缆组件、腕关节驱动线缆组件、肘关节驱动线缆组件、肩关节驱动线缆组件和驱动控制组件主要用于控制各关节运动方向。
7.作为本发明实施例的进一步改进,所述手部运动组件包括柔性手套、线缆固定座、柔性弯曲传感器、和薄膜力传感器;所述柔性手套穿戴在病患手部;所述线缆固定座缝合安装在柔性手套入口侧,与所述手部驱动线缆组件连接;所述柔性弯曲传感器安装在柔性手套的手背部位,主要用于检测手指弯曲角度;所述薄膜力传感器安装在柔性手套的手部部位,主要用于检测手部在抓取物体时的受力大小。
8.作为本发明实施例的进一步改进,所述腕关节运动组件包括腕部固定件、腕部旋转限位块、腕部旋转滑块、腕部滑道、轴承安装座、支撑轴承;所述腕部滑道与所述前臂固定组件、腕关节驱动线缆组件连接;所述腕部旋转滑块安装在腕部滑道内侧,沿滑道轨迹进行往复移动,且设有驱动线缆组件引导槽;所述腕部旋转限位块安装在腕部旋转滑块两端,且设有驱动线缆安装孔;用于所述腕部固定件安装在腕部旋转滑块内侧面,用于固定病患腕关节;所述轴承安装座安装在腕部滑道两侧面,可调整支撑轴承安装位置。
9.作为本发明实施例的进一步改进,所述前臂固定组件包括前臂支撑架、第一传感器安装座、第一调节连杆;所述第一调节连杆通过轴承安装在肘关节运动组件内侧驱动轴上;所述前臂支撑板与第一调节连杆连接;所述第一传感器安装座安装在前臂支撑架内侧。
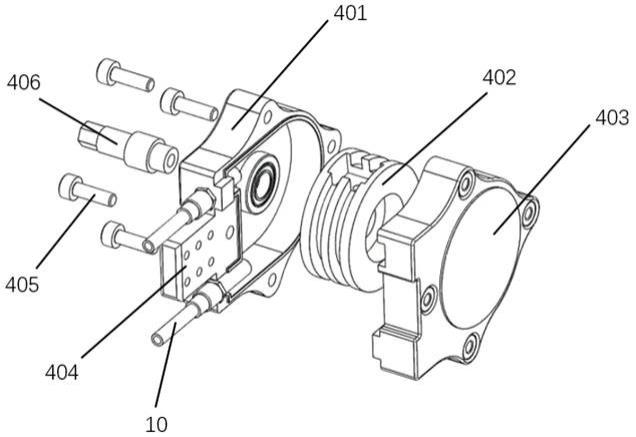
10.作为本发明实施例的进一步改进,所述肘关节运动组件包括肘关节驱动器第一外壳、肘关节线缆绕线盘、肘关节驱动器第二外壳、第二调节连杆、固定螺栓、肘关节驱动轴;所述肘关节驱动器第一外壳、肘关节第一绕线轮组、肘关节驱动器第二外壳通过轴承固定在肘关节驱动轴上;所述肘关节驱动线缆组件通过肘关节驱动器第一外壳与肘关节第一绕线轮组相连;所述肘关节驱动器第一外壳和肘关节驱动器第二外壳通过固定螺栓连接;所述第二调节连杆安装在肘关节驱动器第一外壳上。
11.作为本发明实施例的进一步改进,所述上臂固定组件包括上臂支撑架、第二传感器安装座、第三调节连杆;所述第三调节连杆与肘关节运动组件中的第二调节连杆通过螺栓相连;所述上臂支撑板与第三调节连杆连接;所述第二传感器安装座安装在上臂支撑架内侧。
12.作为本发明实施例的进一步改进,所述肩关节运动组件包括肩关节线缆驱动器、肩关节活动连杆、肩关节活动基座、连杆基座、第四调节连杆;所述肩关节线缆驱动器与背部调节组件通过螺栓相连;所述肩关节活动连杆与肩关节线缆驱动器相连;所述肩关节活动基座通过轴承套与肩关节活动连杆相连;所述连杆基座通过轴承与肩关节活动基座相连;所述第四调节连杆上端与连杆基座连接,下端与上臂固定组件中的第三调节连杆相连。
13.作为本发明实施例的进一步改进,所述固定背架包括腰肩绑带、腰部支撑件、驱动固定板;所述驱动固定板通过板上凹槽与腰肩绑带相连;所述腰部支撑件通过螺栓与驱动固定板相连。
14.作为本发明实施例的进一步改进,所述驱动控制组件包括驱动控制箱、驱动控制主板、肘关节第二绕线轮组、肘关节驱动电机、肩关节驱动电机、肩关节绕线轮组、电源模块、手部驱动控制组件、腕关节驱动电机、腕关节绕线轮组;所述腕关节驱动电机、肩关节驱动电机、肘关节驱动电机分别与驱动控制箱通过螺栓相连;所述腕关节绕线轮组、肩关节绕线轮组、肘关节第二绕线轮组分别和驱动控制箱通过螺栓连接;所述手部驱动线缆组件、腕关节驱动线缆组件、肩关节驱动线缆组件、肘关节驱动线缆组件穿过驱动控制箱上的安装孔分别与手部驱动控制组件、腕关节绕线轮组、肩关节绕线轮组、肘关节第二绕线轮组相连;所述电源模块通过卡扣与驱动控制箱内板相连;所述无线通信模块通过卡扣与驱动控制箱内板相连;所述手部驱动控制组件通过螺栓与驱动控制箱相连;所述驱动控制主板通过螺栓与驱动控制箱相连。
15.作为本发明实施例的进一步改进,所述手部驱动控制组件包括手部驱动控制箱、手部驱动电机、手部绕线轮组、线缆引导块、绕线轮组外壳;所述手部驱动电机通过卡槽与手部驱动控制箱相连;所述手部绕线轮组通过轴与手部驱动电机和手部驱动控制箱相连;所述线缆引导块通过螺栓与手部驱动控制箱相连;所述绕线轮组外壳通过螺栓与手部驱动控制箱相连。
16.作为本发明实施例的进一步改进,所述上肢瘫痪患者康复用智能外骨骼的控制模式主要包括主动控制模式、手动控制模式、姿态控制模式、康复训练模式、镜像跟随模式以及个性化定制模式,根据患者上肢受损程度可在上位机中进行外骨骼控制模式选择。
17.使用时,通过前臂及上臂放置的表面肌电传感器检测患者运动信号,识别患者运动意图,通过控制系统调整外骨骼运动模式,通过力传感器、柔性弯曲传感器及姿态传感器等反馈调节,采用线缆驱动肩关节、肘关节、腕关节、手部运动,实现上肢抬臂、摆臂、腕关节旋转和/或手部伸缩功能;在疾病早期,外骨骼协助瘫痪患者上肢进行康复运动,在疾病后期,外骨骼协助患者上肢主动运动,让患者能够独自完成日常基本的活动有益效果:与现有技术相比,本发明具备突出的实质性特点和显著的进步:1、本发明实施例提供一种上肢瘫痪患者康复用智能外骨骼,采用多传感器融合技术,能够识别患者运动意图,主动协助患者瘫痪上肢进行运动,实现患者上肢肩关节外展/内收、肘关节伸展/弯曲、腕关节内旋/外旋、手部弯曲/伸展运动。在患者疾病早期,外骨骼辅助患者进行康复训练,尽早让患者上肢形产生新的神经调节通路,预防患者上肢肌肉萎缩及关节僵硬;在患者疾病中后期,外骨骼主动式运动协助患者瘫痪上肢进行运动,完成日常起居功能,降低病患陪护成本,提高患者生活品质。
18.2、本发明实施例的上肢瘫痪患者康复用智能外骨骼,采用线缆驱动外骨骼肩、肘、腕、手指关节运动,将驱动器组件安装在远离关节的位置,减少患者上肢的负载,实现外骨骼结构轻量化并降低成本,提升设备运动灵活性和穿戴舒适性。
19.3、本发明实施例的上肢瘫痪患者康复用智能外骨骼,采用具备力、弯曲柔性传感器的柔性手套对上肢瘫痪患者手部进行固定,在前臂和上臂固定组件安装表面肌电传感器,可主动监测患者运动意图,设置主动控制、手动控制、姿态控制、康复训练控制、镜像跟随控制等多种训练模式,提升上肢瘫痪患者手部肌肉能力,帮助患者完成康复运动、协助完成日常起居活动。
20.4、本发明实施例的上肢瘫痪患者康复用智能外骨骼,采用无线、串口通讯等多种方式,可对患者佩戴设备时的人体运动数据、人机交互数据等进行实时记录和导出分析,方便对患者进行病情评估及阶段性的制定训练方案,降低患者康复运动的局限性,有效提升患者的恢复效果。
21.5、本发明实施例的上肢瘫痪患者康复用智能外骨骼,通过采用柔性绷带对患者上肢进行固定,在前臂、上臂采用可调连杆安装,提升患者穿戴适用性及设备运行稳定性。
22.6、在肩关节设置活动连杆及线缆驱动器,有效简化了肩关节结构尺寸,解决了患者肩关节与外骨骼结构间的对准,解决人机运动干扰,提升关节运动灵活性。
附图说明
23.图1为本发明实施例中上肢瘫痪患者康复用智能外骨骼的结构示意图;图2为本发明实施例中手部运动组件的结构示意图;图3为本发明实施例中腕关节运动组件的结构示意图;图4为本发明实施例中前臂固定组件、肘关节运动组件和上臂固定组件的装配示意图;图5为本发明实施例中肘关节运动组件的结构示意图;图6为本发明实施例中肩关节运动组件的结构示意图;图7为本发明实施例中背部调节组件和固定背架的装配示意图;图8为本发明实施例中驱动控制组件的结构示意图;图9为本发明实施例中手部驱动控制组件的结构示意图。
24.图10为本发明实施例中上肢瘫痪患者康复用智能外骨骼控制机构框图。
25.图11为本发明实施例中上肢瘫痪患者康复用智能外骨骼控制系统架构图。
26.图中,手部运动组件1,柔性手套101,线缆固定座102,柔性弯曲传感器103,和薄膜力传感器104,腕关节运动组件2,腕部固定件201,腕部旋转限位块202,腕部旋转滑块203,轴承安装座204,支撑轴承205,腕部滑道206,前臂固定组件3,前臂支撑架301,第一传感器安装座302,第一调节连杆303,肘关节运动组件4,肘关节驱动器第一外壳401,肘关节线缆绕线盘402,肘关节驱动器第二外壳403,第二调节连杆404,固定螺栓405,肘关节驱动轴406,上臂固定组件5,上臂支撑架501。第二传感器安装座502,第三调节连杆503,肩关节运动组件6,肩关节线缆驱动器601,肩关节活动连杆602,肩关节活动基座603,连杆基座604,第四调节连杆605,固定背架7,腰肩绑带701,腰部支撑件702,驱动固定板703,背部调节组件8,肩关节驱动线缆组件9,肘关节驱动线缆组件10,驱动控制组件11,驱动控制箱110,驱动控制主板111,肘关节第二绕线轮组112,肘关节驱动电机113,肩关节驱动电机114,肩关节绕线轮组115,电源模块116,无线通信模块117,手部驱动控制组件118,手部驱动控制箱1181,手部驱动电机1182,手部绕线轮组1183,线缆引导块1184,绕线轮组外壳1185,腕关节驱动电机119,腕关节绕线轮组1110,手部驱动线缆组件12,腕关节驱动线缆组件13。
具体实施方式
27.下面对本发明的技术方案进行详细的说明。
28.本发明实施例提供一种上肢瘫痪患者康复用智能外骨骼,如图1所示,包括手部运
动组件1、腕关节运动组件2、前臂固定组件3、肘关节运动组件4、上臂固定组件5、肩关节运动组件6、固定背架7、背部调节组件8、肩关节驱动线缆组件9、肘关节驱动线缆组件10、驱动控制组件11、手部驱动线缆组件12、腕关节驱动线缆组件13。固定背架7通过弹性腰肩绑带701与患者身体相连,驱动控制组件11通过螺栓与固定背架7的驱动控制板703相连,可通过驱动控制板703上的安装凹槽调节驱动控制组件11的安装位置。背部调节组件8通过螺栓与固定背架7的腰部支撑件702上安装孔相连。肩关节运动组件6通过螺栓连接在背部调节组件8的右侧安装面板上,可根据安装面板上的安装孔调节肩关节运动组件安装位置,消除外骨骼关节和患者关节运动不同轴的问题。肩关节驱动线缆组件9的一端端穿过线缆快速接口与肩关节运动组件6的线缆驱动器601相连,肩关节驱动线缆组件9的另一端穿过线缆快速接口与驱动控制组件11的肩关节绕线轮组115相连。上臂固定组件5的调节连杆503通过螺栓与肩关节运动组件6的调节连杆605相连,可根据患者上肢长度调节连杆间的安装孔位置。肘关节运动组件4的第二调节连杆404通过螺栓与上臂固定组件5的调节连杆503相连。肘关节驱动线缆组件10的一端穿过线缆快速接口与肘关节运动组件4的线缆绕线盘402相连,肩关节驱动线缆组件的另一端穿过线缆快速接口与驱动控制组件11的肘关节绕线轮组112相连。前臂固定组件3的调节连杆303通过轴承与肘关节运动组件4的驱动轴406相连。腕关节运动组件2的腕部滑道206通过螺栓与前臂固定组件3的第一调节连杆303相连。腕关节驱动线缆组件13的一端穿过线缆快速接口与腕关节运动组件2的腕部旋转限位块202相连,腕关节驱动线缆组件13的另一端穿过线缆快速接口与驱动控制组件11的腕关节绕线轮组1110相连。手部运动组件1通过柔性手套101与患者手部相连。手部驱动线缆组件12的一端穿过腕关节运动组件2的线缆固定座102与柔性手套101指尖部位相连,腕关节驱动线缆组件13的另一端穿过线缆快速接口与驱动控制组件11中手部驱动控制组件118的手部绕线轮组1183相连。
29.具体优选的,如图2所示,手部运动组件1包括柔性手套101、线缆固定座102、柔性弯曲传感器103、薄膜力传感器104。线缆固定座102通过缝合固定在柔性手套101开口位置内侧的掌心面和掌背面。手部驱动线缆组件通过线缆固定座102沿手指轴线方向依次布置,通过缝合固定在柔性手套101内侧掌心面和掌背面。柔性弯曲传感器103沿手指轴线方向布置,通过缝合固定在柔性手套101的掌背面。所述柔性弯曲传感器103主要用于监测患者手指弯曲程度,采用无线传输方式将数据传输至驱动控制主板111。薄膜力传感器104沿手指轴线方向和掌心处放置,通过缝合固定在柔性手套101的掌心面。所述薄膜力传感器104主要用于监测患者手部所受压力大小,采用无线传输方式将数据传输至驱动控制主板111。
30.优选的,如图3所示,腕关节运动组件2包括腕部固定件201、腕部旋转限位块202、腕部旋转滑块203、轴承安装座204、支撑轴承205、腕部滑道206。腕部滑道206的外侧端面通过螺栓连接在前臂固定组件3中第一调节连杆303的前侧安装孔。腕部轴承安装座204安装在腕部滑道206两侧面的轴承安装孔中,支撑轴承205安装在轴承安装座204上。腕部旋转滑块203从圆弧端面将其两侧沟槽安装在支撑轴承205上。腕关节驱动线缆组件13通过腕部滑道206外侧面上的线缆快速接头,布置在腕部旋转滑块203的内沟槽中,将腕关节驱动线缆13的前端固定在腕部旋转限位块202内侧固定孔上。腕部旋转限位块通过螺栓将其两侧面上安装孔与腕部旋转滑块圆弧两端侧面沟槽上的安装孔相连。腕部固定件201的两端凹槽可添加弹性绑带将设备与患者上肢腕部固定,腕部固定件201外侧端面通过螺栓与腕部旋
转滑块203内侧端面相连。
31.优选的,如图4所示,前臂固定组件3包括前臂支撑架301、第一传感器安装座302、第一调节连杆303、第一弹性绑带304。第一调节连杆303的一端通过紧固螺栓与肘关节驱动轴406相连。前臂支撑架301通过左侧凹槽固定在第一调节连杆303上。前臂支撑架301左侧凹槽与第一调节连杆303沿轴向开设有螺栓安装孔,前臂支撑架301可沿轴向进行移动,调节安装固定孔的位置。第一弹性绑带304放置在前臂支撑架301两端凹槽处,将设备与患者上肢固定。第一传感器安装座302通过胶合安装在前臂支撑架301内侧,可放置表面肌电传感器、姿态传感器等。
32.其中,本实施例中肘关节运动组件4的结构如图5所示,肘关节运动组件包括肘关节驱动器第一外壳401、肘关节线缆绕线盘402、肘关节驱动器第二外壳403、第二调节连杆404、固定螺栓405、肘关节驱动轴406。肘关节驱动轴上依次安装有肘关节驱动器第二外壳403、肘关节驱动器第二外壳403、肘关节驱动器第一外壳401。肘关节驱动器第一外壳401通过固定螺栓405与肘关节驱动器第二外壳403相连。第二调节连杆404放置在肘关节驱动器第一外壳401的凹槽中,通过螺栓与肘关节驱动器第一外壳401相连。肘关节驱动线缆组件10穿过肘关节驱动器第一外壳401上的线缆快速接头,固定在肘关节线缆绕线盘402上。
33.上臂固定组件5包括上臂支撑架501、第二传感器安装座502、第三调节连杆503、第二弹性绑带504。第三调节调节连杆503的一端通过螺栓与第二调节连杆404相连。上臂支撑架501通过左侧凹槽固定在第三调节连杆503上。上臂支撑架501左侧凹槽与第三调节连杆503沿轴向开设有螺栓安装孔,上臂支撑架501可沿轴向进行移动,调节安装固定孔的位置。第二弹性绑带504放置在上臂支撑架501两端凹槽处,将设备与患者上肢固定。第二传感器安装座502通过胶合安装在上臂支撑架501内侧,可放置表面肌电传感器、姿态传感器等。
34.优选的,如图6所示,肩关节运动组件6包括肩关节线缆驱动器601、肩关节活动连杆602、肩关节活动基座603、连杆基座604、第四调节连杆605。肩关节线缆驱动器601通过螺栓固定在背部调节组件8右侧的安装板上。第四调节连杆605的下端设有螺栓安装孔,通过螺栓与第三调节连杆503相连。肩关节活动连杆602一端通过螺栓和旋转轴套与肩关节线缆驱动器相连,另一端与肩关节活动基座603相连。肩关节活动连杆602可辅助患者主动完成肩关节前伸、后缩运动,增加肩关节运动灵活度。肩关节活动基座603两侧面设置有轴承安装孔,肩关节活动基座的主轴通过轴承依次与肩关节活动基座603、连杆基座604相连。连杆基座604两侧面设置有螺栓安装孔,可沿连杆基座604轴线方向进行安装位置调节,并通过螺栓安装。第四调节连杆605可辅助患者主动完成肩关节前屈、后伸运动。
35.优选的,如图7所示,固定背架7包括腰肩绑带701、腰部支撑件702、驱动固定板703。腰肩绑带701通过缝合固定在驱动固定板703上的凹槽处。腰部支撑件702放置在驱动固定板703中间处,通过螺栓与驱动固定板703相连,可沿轴线调节安装高度。背部调节组件8通过上下侧的凹槽与腰肩绑带701相连。
36.优选的,如图8所示,驱动控制组件11包括驱动控制箱110、驱动控制主板111、肘关节第二绕线轮组112、肘关节驱动电机113、肩关节驱动电机114、肩关节绕线轮组115、电源模块116、手部驱动控制组件118、腕关节驱动电机119、腕关节绕线轮组1110。肘关节第二绕线轮组112、肘关节驱动电机113、肩关节驱动电机114和肩关节绕线轮组115通过螺栓安装在驱动控制箱110内上侧。电源模块116通过卡扣安装在驱动控制箱内左下侧。手部驱动控
制组件118和腕关节驱动电机119通过螺栓安装在驱动控制箱110右下侧。手部驱动控制组件118通过螺栓安装在驱动控制箱110右侧。驱动控制主板111通过卡扣安装在手部驱动控制组件118上侧。肩关节驱动线缆组件9穿过驱动控制箱110右上侧的线缆快速接头,固定在肩关节绕线轮组115上。肩关节驱动线缆组件9穿过驱动控制箱110左上侧的线缆快速接头,固定在肩关节绕线轮组115上。肘关节驱动线缆组件9穿过驱动控制箱110右上侧的线缆快速接头,固定在肘关节第二绕线轮组112上。腕关节驱动线缆组件13穿过驱动控制箱110右下侧的线缆快速接头,固定在腕关节绕线轮组19上。手部驱动线缆组件13穿过驱动控制箱1107右侧的线缆快速接头,引入手部驱动控制组件118,固定在手部驱动控制组件118中的手部绕线轮组1183上。
37.其中,本实施例中手部驱动控制组件118的结构如图9所示,手部驱动控制组件118包括手部驱动控制箱1181、手部驱动电机1182、手部绕线轮组1183、线缆引导块1184、绕线轮组外壳1185。手部驱动电机1182通过卡扣安装在手部驱动控制箱1181右侧。手部绕线轮组1183通过驱动轴与手部驱动电机1182相连,放置在手部驱动控制箱1181左侧。绕线轮组外壳1185通过螺栓与手部驱动控制箱1181相连,覆盖在手部绕线轮组1183上方。线缆引导块1184通过螺栓与手部驱动控制箱1181相连,放置在箱内手部绕线轮组1183的前侧。线缆引导块1184开设有放置线缆凹槽,将线缆凹槽位置与驱动控制箱前侧面开设的线缆引导孔对应。手部驱动线缆组件的一端通过紧固螺栓固定在手部绕线轮组1183上,驱动线缆传送至线缆引导块1184中的凹槽,依次通过驱动控制箱110上的线缆快速接头、手部驱动组件1的线缆固定座102,将手部驱动线缆组件另一端固定在柔性手套101的指尖处。
38.优选的,如图10所示,上肢瘫痪患者康复用智能外骨骼控制机构中,主控板依次与手部、腕关节、肘关节、肩关节驱动电机相连,用于提供电机方向控制信号和转速信号,接受电机内部位置、速度、负载、温度传感器的反馈信号,从而对各关节驱动电机的控制。无线通信模块用于接收压力、弯曲、表面肌电、姿态传感器反馈的信号,传输对应传感器的信号给主控板。其中薄膜压力传感器用于检测手部抓取物体时的受力大小,柔性弯曲传感器用于检测手部的弯曲角度,表面肌电传感器用于检测患者上肢运动时的表面肌电信号,姿态传感器用于检测患者上肢的姿态信息。
39.优选的,如图11所示,上肢瘫痪患者康复用智能外骨骼控制系统架构中,外骨骼控制系统包括上位机、数据融合驱动模块、无线通讯模块和下位机。其中数据融合驱动模块用于产生及优化个性化康复运动方案并传输给上位机,上位机通过无线通讯模块与下位机相连接,下位机外骨骼设备用于患者进行上肢康复训练。上位机为上肢瘫痪患者康复用智能外骨骼的人机交互窗口,包括外骨骼的操作界面模块、交互控制模块、个性化定制模块、调试模块。数据融合驱动模块包括患者康复训练数据库和个性化控制模型训练。患者康复训练数据库主要用于存储患者使用外骨骼设备期间的相关姿态、触觉等数据,个性化控制模型训练是指针对外骨骼设备各关节运动方案进行规划,对不同患者进行个人康复训练模式的定制,提升患者康复训练舒适性及有效性。上位机可用于接收数据融合驱动模块的个性化控制模型数据信息,并由无线通讯模块与下位机进行数据动态交互。下位机包括主控板和外骨骼设备模块。主控板接收由无线通讯模块传输的数据,进行数据处理分析后传送至外骨骼机器人设备,以控制外骨骼各关节电机及传感器按预先设定的训练模式进行运转。
40.其中,上位机的操作界面模块包括患者参数输入、动态参数显示、设备初始化显
示、设备连接显示。患者参数输入主要用于针对外骨骼设备的使用患者,在康复训练前输入患者相关基本信息、身体参数及就诊信息,依据获取得到的患者个性化信息,建立个性化康复训练方案。动态参数显示主要包括在上位机人机交互界面显示患者在使用外骨骼过程中的手部抓握力状态、外骨骼设备各关节运动角度及速度等信息。
41.其中,上位机的交互定制模块用于外骨骼设备控制模式的选择,包括外骨骼手动控制模式、姿态控制模式、主动控制模式、康复训练模式、镜像跟随模式。手动控制模式由患者自行操作外骨骼运动控制界面进行康复训练。姿态控制模式利用外骨骼设备上的姿态传感器识别患者上肢运动,从而实现患者上肢康复训练运动。主动控制模式通过外骨骼设备上的肌电传感器监测患者上肢运动意图,通过姿态传感器、弯曲传感器、力传感器的动态反馈控制外骨骼设备的康复运动。康复训练模式通过采用固定的训练方案对患者进行康复训练运动,患者不可改变或添加康复训练方案内容。镜像跟随模式通过在患者健康侧上肢上穿戴姿态传感器、肌电传感器、弯曲传感器等多种传感器,实时监测患者健康侧上肢的运动姿态,并将传感器传回的数据通过无线通讯模块反馈到外骨骼设备,从而使外骨骼设备主动进行患者患病侧上肢的运动。
42.其中,上位机的调试模块可用于外骨骼设备的性能分析及优化,包括传感器测试、通信数据测试、单关节驱动测试、多关节联调测试。传感器测试主要实现外骨骼设备安装的各类传感器调试,通信数据测试主要实现上位机和下位机之间的通信数据显示及处理,单关节驱动测试主要实现外骨骼设备各关节的独立运动测试及优化,多关节联调测试主要实现外骨骼设备各关节间的联合运动测试及优化。
43.本发明优选实施例的上肢瘫痪患者康复用智能外骨骼的工作过程如下:当患者进行康复训练时,通过在上臂固定组件5和前臂固定组件3上放置的表面肌电传感器检测患者上肢肌电信号的变化,手部运动组件1中的柔性弯曲传感器103和薄膜力传感器104将患者手指关节弯曲信息和受力大小信息反馈到驱动控制主板111,驱动控制主板111判断并输出对应训练模式的信号,控制手部驱动电机1182、腕关节驱动电机119、肘关节驱动电机113、肩关节驱动电机114的旋转方向及速度,从而控制手部驱动线缆组件12带动柔性手套101运动、腕关节驱动线缆组件19带动腕关节运动组件2运动、肘关节驱动线缆组件10带动肘关节运动组件4运动、肩关节驱动线缆组件9带动肩关节运动组件6运动。当手部驱动电机1182正转时,手部运动组件1中的柔性手套101掌心面驱动线缆收缩、掌背面驱动线缆拉伸,从而实现患者手部弯曲运动。当手部驱动电机1182反转时,手部运动组件1中的柔性手套101掌心面驱动线缆拉伸、掌背面驱动线缆收缩,从而实现患者手部伸展运动。当腕关节驱动电机119正转时,腕关节运动组件2中的腕部旋转滑块203顺时针转动,从而实现患者腕部内旋运动。当腕关节驱动电机119反转时,腕关节运动组件2中的腕部旋转滑块203逆时针转动,从而实现患者腕部外旋运动。当肘关节驱动电机113正转时,肘关节驱动线缆10带动肘关节线缆绕线盘402顺时针转动,从而使与肘关节驱动轴相连的第一调节连杆顺时针旋转,实现患者肘关节伸展。当肘关节驱动电机113反转时,肘关节驱动线缆10带动肘关节线缆绕线盘402逆时针转动,从而使第一调节连杆逆时针旋转,实现患者肘关节弯曲。当肩关节驱动电机114正转时,肩关节驱动线缆组件9带动肩关节线缆驱动器601的轴顺时针转动,从而使与其相连的肩关节活动连杆602顺时针旋转,实现患者肩关节内收。肩关节驱动电机114反转时,肩关节驱动线缆组件9带动肩关节线缆驱动器601的轴逆时针转动,
从而使与其相连的肩关节活动连杆602逆时针旋转,实现患者肩关节外展。当患者主动进行肩关节外旋、内旋运动时,肩关节活动连杆602可沿安装轴改变每一连杆位置,提升外骨骼穿戴舒适性。当患者主动进行肩关节前屈、后伸运动时,第四调节连杆605随患者上肢移动而顺/逆时针旋转。
44.以上显示和描述了本发明的基本原理、主要特征和优点。本领域的技术人员应该了解,本发明不受上述具体实施例的限制,上述具体实施例和说明书中的描述只是为了进一步说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1