用于准分子激光角膜屈光手术的角膜中心定位方法与流程
1.本发明属于准分子激光角膜屈光手术技术领域,具体为用于准分子激光角膜屈光手术的角膜中心定位方法。
背景技术:
2.现有生活中,准分子激光角膜表面切削术是眼科最先应用激光矫正屈光不正的手术方法,近年来的lasik和lasek都是在prk手术基础上发展的,而瞳孔是虹膜的围成的孔隙,是人眼光学系统的重要组成部分,其主要功能是通过改变大小维持不同照明环境下进入眼底光线的稳定,此外,瞳孔大小对眼睛成像的焦深及全眼像差也有很大的影响,在激光屈光手术中,角膜切削中心的定位和保持是至关重要的,特别是在像差引导的激光屈光手术。激光屈光手术中,为了便于操作,通常假定治疗中心通过理论上的视轴和角膜顶点。然而,眼球跟踪系统通常跟踪的是瞳孔,而瞳孔中心与角膜顶点是有差别的,在某些情况下,这种差别可以十分显著,为了解决这个问题,当前的方法是采用引入一个固定的移心量来补偿这个差别,却追踪瞳孔中心,但治疗区以靠近视轴的角膜顶点为中心,因此,角膜中心定位也是准分子激光角膜屈光手术较为重要的一项步骤。
3.但是在现有技术中,对于角膜中心的定位大都是依赖医生的感官以及瞳孔的中心位置进行简单定位的,而这样的定位方式外界影响因素较多,定位结果不够精确,极其考验医生的经验以及感官操作,而当医生进行手术时出现劳累的情况,极易造成角膜中心定位不准确,不利于实际的应用与操作。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供用于准分子激光角膜屈光手术的角膜中心定位方法,解决了背景技术中提到的问题。
5.为了解决上述问题,本发明提供了一种技术方案:
6.用于准分子激光角膜屈光手术的角膜中心定位方法,包括以下步骤:
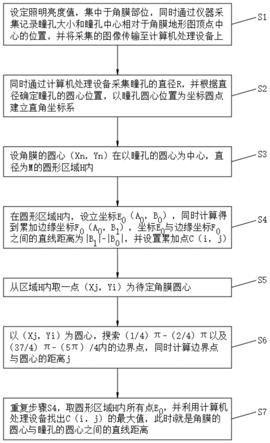
7.s1、设定照明亮度值,集中于角膜部位,同时通过仪器采集记录瞳孔大小和瞳孔中心相对于角膜地形图顶点中心的位置,并将采集的图像传输至计算机处理设备上;
8.s2、同时通过计算机处理设备采集瞳孔的直径r,并根据直径确定瞳孔的圆心位置,以瞳孔圆心位置为坐标圆点建立直角坐标系;
9.s3、设角膜的圆心(xn,yn)在以瞳孔的圆心为中心,直径为m的圆形区域h内;
10.s4、在圆形区域h内,设立坐标e0(a0,b0),同时计算得到累加边缘坐标f0(a0,b1),坐标e0与边缘坐标f0之间的直线距离为|b1|-|b0|,并设置累加点c(i,j);
11.s5、从区域h内取一点(xj,yi)为待定角膜圆心;
12.s6、以(xj,yi)为圆心,搜索(1/4)π-(2/4)π以及(37/4)π-(5π)/4内的边界点,同时计算边界点与圆心的距离j;
13.s7、重复步骤s4,取圆形区域h内所有点e0,并利用计算机处理设备找出c(i,j)的
最大值,此时i就是角膜的圆心与瞳孔的圆心之间的直线距离。
14.作为优选,所述步骤s1中设置照明亮度值为78-96,所述步骤s1中的仪器为近红外相机。
15.作为优选,所述步骤s2中的计算机处理设备为带有眼球追踪系统的激光机器。
16.作为优选,所述步骤s3中圆形区域h的直径m为2/3r。
17.作为优选,所述步骤s4中i表示区域h内的序号,所述步骤s4中的j表示区域h内的半径值。
18.作为优选,所述步骤s4中累加点c与坐标e0之间的直线距离小于|b1|-|b0|。
19.作为优选,所述步骤s5中选取待定角膜圆心的半径限制在0.4r-0.9r之间。
20.作为优选,所述步骤s7中在重复取所有点e0时,需要以瞳孔圆心位置为坐标圆点,分别在第一象限、第二象限、第三象限与第四象限内部分别进行取值。
21.本发明的有益效果是:本发明利用计算机处理设备以瞳孔圆心确定取值的区域,并在区域内部根据累加值选取所有的点设置为待定圆心,同时计算边界点与圆心之间的距离,并对累加值数据进行对比,从而得出角膜的圆心与瞳孔的圆心之间的直线距离,进而无需通过医生进行手动以及感官进行定位,保证了对角膜中心定位的准确性,同时极大的降低了误差的发生,有利于实际的应用与操作。
附图说明:
22.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
23.图1是本发明用于准分子激光角膜屈光手术的角膜中心定位方法流程图。
具体实施方式:
24.如图1所示,本具体实施方式采用以下技术方案:
25.实施例:
26.用于准分子激光角膜屈光手术的角膜中心定位方法,包括以下步骤:
27.s1、设定照明亮度值,集中于角膜部位,同时通过仪器采集记录瞳孔大小和瞳孔中心相对于角膜地形图顶点中心的位置,并将采集的图像传输至计算机处理设备上;
28.s2、同时通过计算机处理设备采集瞳孔的直径r,并根据直径确定瞳孔的圆心位置,以瞳孔圆心位置为坐标圆点建立直角坐标系;
29.s3、设角膜的圆心(xn,yn)在以瞳孔的圆心为中心,直径为m的圆形区域h内;
30.s4、在圆形区域h内,设立坐标e0(a0,b0),同时计算得到累加边缘坐标f0(a0,b1),坐标e0与边缘坐标f0之间的直线距离为|b1|-|b0|,并设置累加点c(i,j);
31.s5、从区域h内取一点(xj,yi)为待定角膜圆心;
32.s6、以(xj,yi)为圆心,搜索(1/4)π-(2/4)π以及(37/4)π-(5π)/4内的边界点,同时计算边界点与圆心的距离j,便于更好的排除虹膜纹理的干扰;
33.s7、重复步骤s4,取圆形区域h内所有点e0,并利用计算机处理设备找出c(i,j)的最大值,此时i就是角膜的圆心与瞳孔的圆心之间的直线距离。
34.其中,所述步骤s1中设置照明亮度值为78-96,所述步骤s1中的仪器为近红外相机,便于更加清楚的采集图像。
35.其中,所述步骤s2中的计算机处理设备为带有眼球追踪系统的激光机器,通过带有眼球追踪系统的激光机器,便于更好的确定瞳孔的圆心位置以及直径。
36.其中,所述步骤s3中圆形区域h的直径m为2/3r,便于更好的保证数值确定的准确性。
37.其中,所述步骤s4中i表示区域h内的序号,所述步骤s4中的j表示区域h内的半径值,便于更加直观的表示技术数值。
38.其中,所述步骤s4中累加点c与坐标e0之间的直线距离小于|b1|-|b0|,便于更好的保证累加点始终位于圆心区域边缘内部。
39.其中,所述步骤s5中选取待定角膜圆心的半径限制在0.4r-0.9r之间,便于更好的降低计算量。
40.其中,所述步骤s7中在重复取所有点e0时,需要以瞳孔圆心位置为坐标圆点,分别在第一象限、第二象限、第三象限与第四象限内部分别进行取值,方便对不同象限内部的数据进行对比计算。
41.具体的:在实际的应用中,首先设定照明亮度值为80,集中于角膜部位,同时通过仪器采集记录瞳孔大小和瞳孔中心相对于角膜地形图顶点中心的位置,并将采集的图像传输至计算机处理设备上;然后通过带有眼球追踪系统的激光机器采集瞳孔的直径r,并根据直径确定瞳孔的圆心位置,以瞳孔圆心位置为坐标圆点建立直角坐标系;然后设角膜的圆心(xn,yn)在以瞳孔的圆心为中心,直径为m的圆形区域h内,其中圆形区域h的直径m为2/3r;接着在圆形区域h内,设立坐标e0(a0,b0),同时计算得到累加边缘坐标f0(a0,b1),坐标e0与边缘坐标f0之间的直线距离为|b1|-|b0|,并设置累加点c(i,j),其中,i表示区域h内的序号,所述步骤s4中的j表示区域h内的半径值,并且累加点c与坐标e0之间的直线距离小于|b1|-|b0|;从区域h内取一点(xj,yi)为待定角膜圆心,其中,选取待定角膜圆心的半径限制在0.4r-0.9r之间;以(xj,yi)为圆心,搜索(1/4)π-(2/4)π以及(37/4)π-(5π)/4内的边界点,同时计算边界点与圆心的距离j;然后,重复上述步骤,取圆形区域h内所有点e0,并利用计算机处理设备找出c(i,j)的最大值,此时i就是角膜的圆心与瞳孔的圆心之间的直线距离,同时在重复取所有点e0时,需要以瞳孔圆心位置为坐标圆点,分别在第一象限、第二象限、第三象限与第四象限内部分别进行取值。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1