一种骨科术后恢复用骨架定位装置的制作方法
1.本发明涉及一种定位装置,尤其涉及一种骨科术后恢复用骨架定位装置。
背景技术:
2.在骨折治疗中,其复位、固定、功能锻炼这三个基本原则十分重要,骨折复位后,因不稳定因素容易发生再移位,需要采用不同的方法将对手臂进行定位,使其逐渐愈合,现有大多数通过固定支架对手臂进行定位,在拆装时也十分不便捷,导致对骨折处的手部进行抹药、清洗擦拭处理时就比较麻烦,且术后也需要对手臂适量进行按摩,由于手需要不停移动,时间一久,比较费力。
3.因此需要设计一种可方便人们对手臂进行定位,抹药清洗不麻烦,且可对手臂进行按摩,省时省力的骨科术后恢复用骨架定位装置,以解决现有技术问题。
技术实现要素:
4.为了克服对骨折处的手部进行抹药、清洗擦拭处理时就比较麻烦,且进行按摩,由于手需要不停移动,时间一久,比较费力的缺点,本发明的技术问题是:提供一种可方便人们对手臂进行定位,抹药清洗不麻烦,且可对手臂进行按摩,省时省力的骨科术后恢复用骨架定位装置。
5.本发明的技术方案是:一种骨科术后恢复用骨架定位装置,包括有支撑底箱、固定底板、支撑架、密闭顶板、海绵板、启动按钮、停止按钮、承重板、缓冲底柱、缓冲弹簧、驱动机构和骨架定位机构,支撑底箱底部固接有固定底板,固定底板底部固接有支撑架,支撑底箱上部前侧铰接式设有密闭顶板,密闭顶板中侧的左右两侧与支撑底箱上中侧的左右两侧都通过螺栓连接有海绵板,支撑底箱外右侧面前上部固接有启动按钮,支撑底箱外右侧面前上部固接有停止按钮,停止按钮位于启动按钮后侧,支撑底箱外左侧面上部固接有用于放置的承重板,支撑底箱后部上侧间隔滑动式设有四根缓冲底柱,缓冲底柱底端与支撑底箱内部之间连接有缓冲弹簧,支撑底箱上连接有用于提供动力的驱动机构,驱动机构上设有用于定位的骨架定位机构。
6.更为优选的,驱动机构包括有伺服电机、驱动短轴、定位皮带组件和固定横杆,支撑底箱外前侧面左部固接有伺服电机,支撑底箱前部中侧左右对称转动式设有驱动短轴,左方驱动短轴前端与伺服电机的输出轴连接,左右两侧驱动短轴后部之间连接有定位皮带组件,定位皮带组件由两个皮带轮和皮带组成,皮带轮安装于驱动短轴后部,皮带绕于两个皮带轮之间,定位皮带组件上连接有固定横杆。
7.更为优选的,骨架定位机构包括有固定边架、定位横杆、夹紧板、夹紧弹簧和定位板,固定横杆前后两侧都固接有固定边架,前后两侧固定边架之间滑动式设有两根定位横杆,两根定位横杆之间前后对称滑动式设有用于限位的夹紧板,定位横杆上绕有两根夹紧弹簧,夹紧弹簧一端与固定边架内侧面连接,夹紧弹簧另一端与夹紧板外侧面连接,夹紧板上部通过螺栓连接有定位板,定位板上间隔转动式设有多个滚珠。
8.更为优选的,还包括有按摩机构,按摩机构包括有固定齿圈、安装底块、定位滑块、定位导柱、定位弹簧、从动齿轮、固定横轴、固定套架、传动皮带组件、从动横轴、滚轮和导向柱,支撑底箱内后侧面固接有固定齿圈,支撑底箱内底部前后对称设有导向柱,导向柱上滑动式设有定位滑块,定位滑块顶部左右对称固接有定位导柱,四根定位导柱之间滑动式设有安装底块,固定横杆与安装底块固定连接,定位导柱上绕有定位弹簧,定位弹簧一端与安装底块连接,定位弹簧另一端与定位滑块连接,安装底块中部转动式设有固定横轴,固定横轴后部固接有从动齿轮,从动齿轮与固定齿圈啮合,安装底块中部套装有固定套架,固定套架上部中侧转动式设有从动横轴,从动横轴后部与固定横轴后部之间连接有传动皮带组件,传动皮带组件由两个皮带轮和皮带组成,一个皮带轮安装于从动横轴后部,另一个皮带轮安装于固定横轴后部上,皮带绕于两个皮带轮之间,从动横轴上固接有三个用于按摩的滚轮。
9.更为优选的,还包括有喷药机构,喷药机构包括有储药箱、增压泵、伸缩软管、连接横板、压缩筒、升降立杆、进液管、雾化喷管和压力传感器,支撑底箱外左侧面固接有储药箱,支撑底箱外左侧面下中部固接有增压泵,增压泵与储药箱连接,支撑底箱左部下中侧设有伸缩软管,伸缩软管与增压泵连接,前后两侧定位滑块之间固接有连接横板,连接横板中部固接有压缩筒,压缩筒与伸缩软管连接,压缩筒内滑动式设有升降立杆,升降立杆上穿接有进液管,安装底块右侧面固接有用于喷药的雾化喷管,雾化喷管与进液管连接,压缩筒内顶部右侧固接有压力传感器。
10.更为优选的,还包括有锁定机构,锁定机构包括有定位架、第一复位导轨、第一复位弹簧、锁定横架、第二复位导轨和第二复位弹簧,密闭顶板后部中侧左右对称固接有第一复位导轨,左右两侧第一复位导轨之间滑动式设有定位架,第一复位导轨上绕有第一复位弹簧,第一复位弹簧一端与定位架连接,第一复位弹簧另一端与密闭顶板连接,支撑底箱后部上侧间隔滑动式设有四根第二复位导轨,四根第二复位导轨后端之间固接有用于限位的锁定横架,锁定横架与定位架配合,支撑底箱内部与第二复位导轨前部之间绕接有第二复位弹簧。
11.更为优选的,还包括有加温机构,加温机构包括有加热模组、光电传感器和散热窗口,密闭顶板中间通过螺栓安装有加热模组,密闭顶板内顶部左中侧固接有光电传感器,密闭顶板前部固接有用于散热的散热窗口。
12.更为优选的,还包括有电控箱,电控箱安装于支撑底箱右部下侧,电控箱内包括有开关电源、电源模块和控制模块,开关电源为该骨科术后恢复用骨架定位装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮、停止按钮、压力传感器和光电传感器都与控制模块电性连接,伺服电机、增压泵、雾化喷管和加热模组都与控制模块通过外围电路连接。
13.有益效果为:1、本发明将手肘与承重板接触,因夹紧弹簧的作用,夹紧板始终带动定位板向内移动与手臂接触,海绵板起到缓冲作用,驱动伺服电机工作,从而夹紧板左右移动带动定位板左右移动,定位板左右移动时滚珠可对手臂进行按摩定位,如此,可方便人们对手臂进行定位。
14.2、本发明在按摩机构的作用下,从动横轴转动带动滚轮转动,滚轮转动对手臂进
行按摩,如此,可方便对手臂进行按摩。
15.3、本发明在喷液机构的作用下,增压泵通过伸缩软管和进液管将药液排入雾化喷管内,雾化喷管将药液喷洒至人们手臂上,如此,可方便人们进行上药。
附图说明
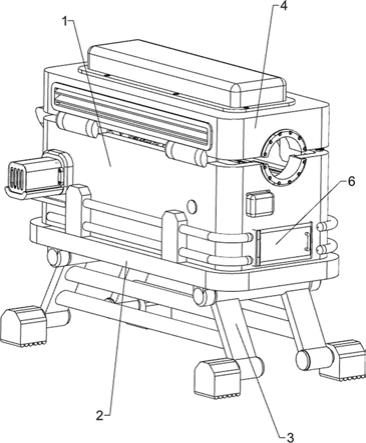
16.图1为本发明的立体结构示意图。
17.图2为本发明的第一种部分立体结构示意图。
18.图3为本发明的第二种部分立体结构示意图。
19.图4为本发明的第三种部分立体结构示意图。
20.图5为本发明的驱动机构的部分立体结构示意图。
21.图6为本发明骨架定位机构的第一种部分立体结构示意图。
22.图7为本发明骨架定位机构的第二种部分立体结构示意图。
23.图8为本发明的第四种部分立体结构示意图。
24.图9为本发明按摩机构的第一种部分立体结构示意图。
25.图10为本发明按摩机构的第二种部分立体结构示意图。
26.图11为本发明按摩机构的第三种部分立体结构示意图。
27.图12为本发明喷药机构的第一种部分立体结构示意图。
28.图13为本发明喷药机构的第二种部分立体结构示意图。
29.图14为本发明喷药机构的第三种部分立体结构示意图。
30.图15为本发明第五种部分立体结构示意图。
31.图16为本发明锁定机构的第一种部分立体结构示意图。
32.图17为本发明锁定机构的第二种部分立体结构示意图。
33.图18为本发明加温机构的第一种部分立体结构示意图。
34.图19为本发明加温机构的第二种部分立体结构示意图。
35.图20为本发明的电路框图。
36.图21为本发明的电路原理图。
37.附图中各零部件的标记如下:1-支撑底箱,2-固定底板,3-支撑架,4-密闭顶板,5-海绵板,6-电控箱,61-启动按钮,62-停止按钮,7-承重板,8-缓冲底柱,81-缓冲弹簧,9-驱动机构,91-伺服电机,92-驱动短轴,93-定位皮带组件,94-固定横杆,10-骨架定位机构,101-固定边架,102-定位横杆,103-夹紧板,104-夹紧弹簧,105-定位板,11-按摩机构,111-固定齿圈,112-安装底块,113-定位滑块,114-定位导柱,115-定位弹簧,116-从动齿轮,117-固定横轴,118-固定套架,119-传动皮带组件,1110-从动横轴,1111-滚轮,1112-导向柱,12-喷药机构,121-储药箱,122-增压泵,123-伸缩软管,124-连接横板,125-压缩筒,126-升降立杆,127-进液管,128-雾化喷管,129-压力传感器,13-锁定机构,131-定位架,132-第一复位导轨,133-第一复位弹簧,134-锁定横架,135-第二复位导轨,136-第二复位弹簧,14-加温机构,141-加热模组,142-光电传感器,143-散热窗口。
具体实施方式
38.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
39.实施例1一种骨科术后恢复用骨架定位装置,如图1-图7所示,包括有支撑底箱1、固定底板2、支撑架3、密闭顶板4、海绵板5、启动按钮61、停止按钮62、承重板7、缓冲底柱8、缓冲弹簧81、驱动机构9和骨架定位机构10,支撑底箱1底部固接有固定底板2,固定底板2底部固接有支撑架3,支撑底箱1上部前侧铰接式设有密闭顶板4,密闭顶板4中侧的左右两侧与支撑底箱1上中侧的左右两侧都通过螺栓连接有海绵板5,支撑底箱1外右侧面前上部固接有启动按钮61,支撑底箱1外右侧面前上部固接有停止按钮62,停止按钮62位于启动按钮61后侧,支撑底箱1外左侧面上部固接有承重板7,可将手臂放置在承重板7上,承重板7进行支撑,支撑底箱1后部上侧间隔滑动式设有四根缓冲底柱8,缓冲底柱8底端与支撑底箱1内部之间连接有缓冲弹簧81,支撑底箱1上连接有驱动机构9,驱动机构9上设有骨架定位机构10,骨架定位机构10可实现对手臂进行定位,驱动机构9可实现对骨架定位机构10提供动力。
40.驱动机构9包括有伺服电机91、驱动短轴92、定位皮带组件93和固定横杆94,支撑底箱1外前侧面左部固接有伺服电机91,支撑底箱1前部中侧左右对称转动式设有驱动短轴92,左方驱动短轴92前端与伺服电机91的输出轴连接,左右两侧驱动短轴92后部之间连接有定位皮带组件93,定位皮带组件93由两个皮带轮和皮带组成,皮带轮安装于驱动短轴92后部,皮带绕于两个皮带轮之间,定位皮带组件93上连接有固定横杆94。
41.骨架定位机构10包括有固定边架101、定位横杆102、夹紧板103、夹紧弹簧104和定位板105,固定横杆94前后两侧都固接有固定边架101,前后两侧固定边架101之间滑动式设有两根定位横杆102,两根定位横杆102之间前后对称滑动式设有夹紧板103,定位横杆102上绕有两根夹紧弹簧104,夹紧弹簧104一端与固定边架101内侧面连接,夹紧弹簧104另一端与夹紧板103外侧面连接,夹紧板103上部通过螺栓连接有定位板105,因夹紧弹簧104的作用,夹紧板103始终带动定位板105向内移动与手臂接触限位,定位板105上间隔转动式设有多个滚珠。
42.人们按下电源总开关,将本装置上电,首先操作人员将密闭顶板4向前转动打开,然后将手肘与承重板7接触,然后将密闭顶板4向后转动关闭,因夹紧弹簧104的作用,夹紧板103始终带动定位板105向内移动与手臂接触,海绵板5起到缓冲作用,按动启动按钮61一次,启动按钮61发出信号,控制模块接收信号后控制伺服电机91工作,伺服电机91带动左方驱动短轴92转动,左右两侧驱动短轴92转动配合带动定位皮带组件93转动,定位皮带组件93转动带动固定横杆94左右移动,固定横杆94左右移动带动固定边架101左右移动,固定边架101左右移动带动定位横杆102左右移动,定位横杆102左右移动带动夹紧板103左右移动,夹紧板103左右移动带动定位板105左右移动,定位板105左右移动时滚珠可对手臂进行按摩定位,无需进行定位时,按动停止按钮62一次,停止按钮62发出信号,控制模块接收信号后控制伺服电机91停止,伺服电机91停止带动左方驱动短轴92转动,定位板105也就停止左右移动,再拿起手臂进行后续处理即可。
43.实施例2在实施例1的基础之上,如图8-图14所示,还包括有按摩机构11,按摩机构11包括有固定齿圈111、安装底块112、定位滑块113、定位导柱114、定位弹簧115、从动齿轮116、固定横轴117、固定套架118、传动皮带组件119、从动横轴1110、滚轮1111和导向柱1112,支撑底箱1内后侧面固接有固定齿圈111,支撑底箱1内底部前后对称设有导向柱1112,导向柱
1112上滑动式设有定位滑块113,定位滑块113顶部左右对称固接有定位导柱114,四根定位导柱114之间滑动式设有安装底块112,固定横杆94与安装底块112固定连接,定位导柱114上绕有定位弹簧115,定位弹簧115一端与安装底块112连接,定位弹簧115另一端与定位滑块113连接,安装底块112中部转动式设有固定横轴117,固定横轴117后部固接有从动齿轮116,从动齿轮116与固定齿圈111啮合,安装底块112中部套装有固定套架118,固定套架118上部中侧转动式设有从动横轴1110,从动横轴1110后部与固定横轴117后部之间连接有传动皮带组件119,传动皮带组件119由两个皮带轮和皮带组成,一个皮带轮安装于从动横轴1110后部,另一个皮带轮安装于固定横轴117后部上,皮带绕于两个皮带轮之间,从动横轴1110上固接有三个滚轮1111,滚轮1111转动可实现对手臂进行按摩。
44.还包括有喷药机构12,喷药机构12包括有储药箱121、增压泵122、伸缩软管123、连接横板124、压缩筒125、升降立杆126、进液管127、雾化喷管128和压力传感器129,支撑底箱1外左侧面固接有储药箱121,支撑底箱1外左侧面下中部固接有增压泵122,增压泵122与储药箱121连接,支撑底箱1左部下中侧设有伸缩软管123,伸缩软管123与增压泵122连接,前后两侧定位滑块113之间固接有连接横板124,连接横板124中部固接有压缩筒125,压缩筒125与伸缩软管123连接,压缩筒125内滑动式设有升降立杆126,升降立杆126上穿接有进液管127,安装底块112右侧面固接有雾化喷管128,雾化喷管128可实现将药液喷洒至人们手臂上,雾化喷管128与进液管127连接,压缩筒125内顶部右侧固接有压力传感器129。
45.当伺服电机91工作时,滚轮1111与手臂接触,固定横杆94左右移动带动安装底块112左右移动,且安装底块112向右移动带动从动齿轮116向右移动,从动齿轮116向右移动通过固定齿圈111开始转动,从动齿轮116转动带动固定横轴117转动,固定横轴117转动带动传动皮带组件119转动,传动皮带组件119转动带动从动横轴1110转动,从动横轴1110转动带动滚轮1111转动,滚轮1111转动对手臂进行按摩,从而定位皮带组件93带动固定横杆94移动至下侧,固定横杆94带动安装底块112向下移动一定距离,定位弹簧115被压缩,滚轮1111也与手臂脱离,同理,定位皮带组件93带动固定横杆94移动至上侧,因定位弹簧115的作用,滚轮1111再次与手臂接触进行按摩,无需使用本装置时,按动停止按钮62一次,停止按钮62发出信号,控制模块接收信号后控制伺服电机91停止,安装底块112停止带动从动齿轮116左右移动,滚轮1111也就停止左右移动且转动,如此,可方便对手臂进行按摩。
46.首先操作人员将适量药液加入储药箱121内,当固定横杆94带动安装底块112向下移动一定距离时,安装底块112向下移动带动雾化喷管128向下移动,雾化喷管128向下移动带动进液管127向下移动,进液管127向下移动带动升降立杆126向下移动,升降立杆126向下移动与压力传感器129接触,压力传感器129发出信号,控制模块接收信号后控制增压泵122和雾化喷管128工作,增压泵122通过伸缩软管123和进液管127将药液排入雾化喷管128内,雾化喷管128将药液喷洒至人们手臂上,从而安装底块112向上移动复位,升降立杆126也就向上移动不再对压力传感器129施加压力,压力传感器129再次发出信号,控制模块接收信号后控制增压泵122和雾化喷管128停止,如此,可方便人们进行上药。
47.实施例3在实施例1和实施例2的基础之上,如图15-图19所示,还包括有锁定机构13,锁定机构13包括有定位架131、第一复位导轨132、第一复位弹簧133、锁定横架134、第二复位导轨135和第二复位弹簧136,密闭顶板4后部中侧左右对称固接有第一复位导轨132,左右两
侧第一复位导轨132之间滑动式设有定位架131,第一复位导轨132上绕有第一复位弹簧133,第一复位弹簧133一端与定位架131连接,第一复位弹簧133另一端与密闭顶板4连接,支撑底箱1后部上侧间隔滑动式设有四根第二复位导轨135,四根第二复位导轨135后端之间固接有锁定横架134,锁定横架134与定位架131配合,锁定横架134插入定位架131内对其进行限位,密闭顶板4也就被限位,支撑底箱1内部与第二复位导轨135前部之间绕接有第二复位弹簧136。
48.还包括有加温机构14,加温机构14包括有加热模组141、光电传感器142和散热窗口143,密闭顶板4中间通过螺栓安装有加热模组141,密闭顶板4内顶部左中侧固接有光电传感器142,密闭顶板4前部固接有散热窗口143,散热窗口143可实现进行散热。
49.当人们使用本装置时,拉动密闭顶板4向下摆动,缓冲底柱8通过缓冲弹簧81起到缓冲作用,人们即可拉动定位架131向下移动,第一复位弹簧133被拉伸,定位架131向下移动与锁定横架134接触,因第二复位弹簧136的作用,定位架131向下移动从锁定横架134上滑过,锁定横架134插入定位架131内对其进行限位,密闭顶板4也就被限位,如需打开密闭顶板4,拉动锁定横架134向后移动,第二复位弹簧136被拉伸,锁定横架134向后移动停止对定位架131限位,因第一复位弹簧133的作用,定位架131向上移动复位,进而松开锁定横架134,因第二复位弹簧136的作用,锁定横架134也就向前移动复位,如此,可避免密闭顶板4不慎被打开。
50.当人们使用本装置时,光电传感器142检测到手臂放入,光电传感器142发出信号,控制模块接收信号后控制加热模组141工作,加热模组141对手臂进行加热,从而促进血液循环,有助于药液吸收,散热窗口143可避免支撑底箱1内过热,无需使用本装置时,人们将手臂取出,光电传感器142再次发出信号,控制模块接收信号后控制加热模组141停止,如此,可促进手臂血液循环,有助于药液吸收。
51.如图1、图20和图21所示,还包括有电控箱6,电控箱6安装于支撑底箱1右部下侧,电控箱6内包括有开关电源、电源模块和控制模块,开关电源为该骨科术后恢复用骨架定位装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮61、停止按钮62、压力传感器129和光电传感器142都与控制模块电性连接,伺服电机91、增压泵122、雾化喷管128和加热模组141都与控制模块通过外围电路连接。
52.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1