一种自适应穿戴外骨骼机器人
1.本发明涉及机器人的技术领域,特别是一种自适应穿戴外骨骼机器人。
背景技术:
2.外骨骼机器人,是一种由框架构成并且可让人穿戴的机器装置,由于外骨骼机器人能提供额外能量,其能提高运动能力,另外,还能增强肌肉力量,可用于辅助治疗。
3.目前外骨骼机器人包括相互连接的上肢结构和下肢结构,下肢结构包括依次转动连接的大腿、小腿和脚部,在下肢结构上连接驱动结构,通过驱动结构改变大腿和小腿的转动角度、改变小腿和脚部的转动角度,从而为患者提供一定的支撑力,实际上,大腿和小腿之间的转动并非只有转动的自由度,还伴随有平移的自由度,而目前单一的转动连接结构并不能实现大腿和小腿转动的自适应性,大大降低了穿戴的舒适度。
技术实现要素:
4.本发明要解决的技术问题是:提供一种自适应穿戴外骨骼机器人,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
5.本发明解决其技术问题的解决方案是:
6.一种自适应穿戴外骨骼机器人,包括:下肢结构,所述下肢结构包括大腿板、小腿板和连接组件,所述连接组件至少具有一组连接端,同一组所述连接端具有两个,两个所述连接端之间设有间距,同一组的其中一个所述连接端与所述大腿板转动连接、另一个所述连接端与所述小腿板转动连接,同一组的两个所述连接端转动形成的两条转动轴线相互平行,所述大腿板的一侧连接有大腿限位组件,所述大腿限位组件具有大腿限位通道和大腿限位开口,所述大腿限位通道的长度方向平行于所述大腿板的长度方向,所述大腿限位开口远离所述大腿板设置,所述大腿限位通道和所述大腿限位开口连通,所述小腿板的一侧连接有小腿限位组件,所述小腿限位组件具有小腿限位通道和小腿限位开口,所述小腿限位通道的长度方向平行于所述小腿板的长度方向,所述小腿限位开口远离所述小腿板设置,所述小腿限位通道和所述小腿限位开口连通;驱动结构,所述驱动结构具有用于改变所述大腿板、小腿板位置的形变部,所述形变部的两端分别转动连接于所述大腿板和所述小腿板,所述形变部两端之间形成的间距可发生变化。
7.通过上述方案,在大腿板和小腿板之间增设连接组件,由于连接组件具有两个连接端,且两个连接端之间具有间距,当形变部两端的间距变化时,大腿板和连接组件之间发生转动,小腿板和连接组件之间发生转动,且大腿板的转动轴线和小腿板的转动轴线不重合,使大腿板和小腿板相互之间除了出现转动外还出现平移的情形,更符合人体膝关节在运动时产生的自由度的变化,提高整体的自适应性,有助于提高穿戴的舒适度;增设大腿限位组件和小腿限位组件,人体的大腿和小腿能被限定于大腿限位通道和小腿限位通道内,当形变部两端受外力影响而导致两端的间距变化时,能给到大腿和小腿一定的支撑力,能辅助病患完成某种康复训练的动作;增设大腿限位开口和小腿限位开口,便于将病患的腿
推入大腿限位通道和小腿限位通道内。
8.作为上述技术方案的进一步改进,所述大腿板包括:第一大腿连接杆;第二大腿连接杆,所述第二大腿连接杆和所述第一大腿连接杆之间连接有大腿紧固件,大腿紧固件呈水平设置,所述大腿限位组件连接于所述第一大腿连接杆或所述第二大腿连接杆,其中一个所述连接端转动连接于所述第一大腿连接杆或所述第二大腿连接杆,所述形变部的其中一端转动连接于所述第一大腿连接杆或所述第二大腿连接杆。
9.通过上述方案,第一大腿连接杆和第二大腿连接杆通过大腿紧固件连接,改变第一大腿连接杆和第二大腿连接杆的重叠位置,可以改变第一大腿连接杆和第二大腿连接杆连接形成的长度,从而适配病患大腿的实际长度,有助于提高穿戴的舒适度。
10.作为上述技术方案的进一步改进,所述下肢结构还包括脚部组件,所述脚部组件包括:脚部连接板,所述脚部连接板和所述小腿板转动连接,所述形变部的其中一端与所述脚部连接板转动连接;脚部支撑板,所述脚部支撑板连接于所述脚部连接板的底部,所述脚部支撑板和所述脚部连接板之间连接有脚部紧固件;脚部支撑条,所述脚部支撑条连接于所述脚部支撑板的顶面,所述脚部支撑条呈弧形设置,所述脚部支撑条朝远离所述脚部支撑板的方向弯曲。
11.通过上述方案,增设脚部组件,使患者的下肢能完全穿戴在机器人上,由于脚部支撑板通过脚部连接板与小腿板连接,且形变部的其中一端与脚部支撑板转动连接,当形变部两端的间距发生改变时,脚部组件和小腿板之间的连接角度会发生改变,类似患者的踝关节转动,为患者提供一定的支撑力。
12.作为上述技术方案的进一步改进,还包括腰部结构,所述腰部结构包括:腰托,所述腰托呈水平设置,所述腰托的一侧形成有夹腰空间;调节组件,所述调节组件包括调节板,所述调节板呈竖直设置,所述调节板和所述腰托连接,所述调节板和所述腰托之间连接有调节紧固件,所述调节紧固件呈水平设置,所述调节板的侧壁设置有调节孔,所述调节孔呈弧形设置,所述大腿板的顶部连接有大腿滑杆,所述大腿滑杆滑动穿设于所述调节孔,且所述大腿滑杆的滑动方向沿所述调节孔的孔型的走向设置。
13.通过上述方案,增设腰托,腰托挂设在腰部;增设调节组件,使大腿板通过大腿滑杆在调节孔上滑动,当形变部两端的间距发生改变时,大腿板可实现在上下、左右方向上的位移,有效的缓冲了运动时机械振动对髋关节的影响。
14.作为上述技术方案的进一步改进,还包括背部结构,所述背部结构包括:背部连接板,所述背部连接板的底部连接于所述腰托;背部钩板,所述背部钩板设置有两块,两块所述背部钩板间隔连接于所述背部连接板的顶部,两个所述背部钩板的开口均朝向下方。
15.通过上述方案,增设背部连接板,背部钩板通过背部连接板连接于腰托,且背部钩板的开口朝向下方,使整体更稳固的挂设在人体上。
16.作为上述技术方案的进一步改进,所述腰托包括:第一腰部板,所述第一腰部板设置有两块,两块所述第一腰部板呈水平设置且相互正对设置,一块所述第一腰部板与一个所述调节组件对应连接;第二腰部板,所述第二腰部板连接于两块所述第一腰部板之间,两块所述第二腰部板和所述第一腰部板之间分别通过第一腰部紧固件连接,所述第一腰部紧固件连接呈水平设置,所述第二腰部板和两块所述第一腰部板连接形成类似u字形的结构,所述第二腰部板和两块所述第一腰部板连接形成所述夹紧空间,所述调节组件连接于所述
第一腰部板远离所述第二腰部板的端部。
17.通过上述方案,考虑到患者腰部粗细的不同,以第二腰部板为基础,改变第一腰部板和第二腰部板的连接位置,进而调节两块第一腰部板之间的间距,使上述间距满足更多患者的需求。
18.作为上述技术方案的进一步改进,所述腰托还包括腰部侧板,一个所述第一腰部板和一个所述调节组件之间对应连接有一个所述腰部侧板,所述腰部侧板呈竖直设置,所述腰部侧板和所述第一腰部板之间连接有第二腰部紧固件,所述第二腰部紧固件呈竖直设置,所述调节紧固件穿设所述腰部侧板。
19.通过上述方案,腰部侧板和第一腰托通过第二腰部固定件连接,且第二腰部紧固件呈竖直设置,根据患者的身形,可调节腰部侧板内侧壁和第一腰托内侧壁之间形成的夹角,使上述夹角大于患者腰部的宽度,有助于提高穿戴的舒适度。
20.作为上述技术方案的进一步改进,所述腰托还包括:导向板,所述导向板设置有两个,两个所述导向板分别连接于两个所述第一腰部板远离所述第二腰部板的一侧,两个所述导向板相互靠近的侧壁之间设有间距;导向杆,所述导向杆呈水平设置,所述导向杆的一端固定于其中一个所述导向板的侧壁、另一端滑动插设于另一个所述导向板的侧壁,所述导向杆的滑动方向呈水平设置。
21.通过上述方案,由于两个第一腰部板之间的间距会发生改变,为了限定第一腰部板的滑动方向,增设导向板和导向杆,由于两个导向板分别固定在两个第一腰部板上,当第一腰部板运动时会同步带动导向板运动,导向板运动时受限于导向杆。
22.作为上述技术方案的进一步改进,所述腰托还包括:第三腰部板,所述第三腰部板可拆卸连接于所述第二腰部板;腰部撑板,所述腰部撑板设置有两块,两块所述腰部撑板连接于所述第三腰部板远离所述第二腰部板的一侧,两块所述腰部撑板之间设有间距,所述腰部撑板远离所述第三腰部板的侧面呈弧形设置,且上述弧形侧面朝远离所述第三腰部板的方向凸出。
23.通过上述方案,增设腰部撑板,腰部撑板通过第三腰部板和第二腰部板连接,两个腰部撑板相抵于患者的后腰位置,为患者的后腰提供支撑点,以提高穿戴的舒适度;且腰部支撑板的面呈弧形设置,其根据人体曲线制备,更贴合患者后腰的位置。
24.作为上述技术方案的进一步改进,一个所述第三腰部板和两个所述腰部撑板之间连接有两个缓冲组件,所述缓冲组件包括缓冲套筒和缓冲弹簧,两个所述缓冲套筒分别与两个所述腰部撑板连接,两个所述缓冲弹簧分别位于两个所述缓冲套筒内,且两个所述缓冲弹簧的轴线分别与所述缓冲套筒的轴线重合,两个所述缓冲弹簧的一端分别固定于两个所述腰部撑板、另一端分别固定于所述第三腰部板。
25.通过上述方案,设置缓冲弹簧,能减少机器人运动时产生的机械碰撞对人体腰部的损伤,且能提到运动的舒适度;另外,增设缓冲套筒能限定缓冲弹簧的形变方向,对缓冲弹簧形成保护。
附图说明
26.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施
例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
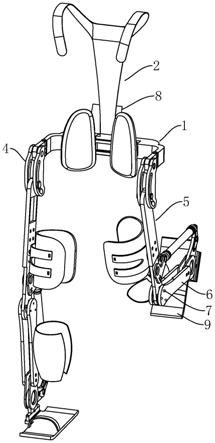
27.图1是本发明外骨骼机器人的结构示意图;
28.图2是本发明外骨骼机器人另一角度的结构示意图;
29.图3是本发明外骨骼机器人中背部结构和腰托的结构示意图;
30.图4是本发明外骨骼机器人腰部结构的部分结构示意图;
31.图5是本发明外骨骼机器人的第一大腿连接杆、第二大腿连接杆、第一小腿连接杆和连接组件的结构示意图。
32.图中,1、腰托;11、第一腰部板;12、第二腰部板;13、第一腰部紧固件;14、导向板;15、导向杆;16、第三腰部板;17、腰部撑板;18、腰部侧板;19、第二腰部紧固件;2、背部结构;21、背部连接板;22、背部钩板;3、缓冲组件;31、缓冲套筒;32、缓冲弹簧;4、调节组件;41、调节板;411、调节孔;42、调节紧固件;5、大腿板;51、第一大腿连接杆;511、大腿滑杆;52、第二大腿连接杆;53、大腿紧固件;54、大腿限位组件;541、大腿限位通道;542、大腿限位开口;6、小腿板;61、第一小腿连接杆;62、第二小腿连接杆;63、小腿紧固件;64、小腿限位组件;641、小腿限位通道;642、小腿限位开口;7、连接组件;8、驱动结构;81、空气调压过滤器;82、三通管;83、导管;84、节流阀;85、人工肌肉;86、第一安装板;87、第二安装板;9、脚部组件;91、脚部连接板;92、脚部支撑板;93、脚部支撑条;94、脚部紧固件。
具体实施方式
33.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,文中所提到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
34.参照图1至图5,为本发明外骨骼机器人的具体实施方式。
35.一种自适应穿戴外骨骼机器人,包括腰部结构,腰部结构包括腰托1,腰托1呈水平设置,腰托1的一侧形成有夹腰空间;腰托1包括第一腰部板11和第二腰部板12,第一腰部板11设置有两块,两块第一腰部板11呈水平设置且相互正对设置,第一腰部板11的水平截面呈l字形;第二腰部板12连接于两块第一腰部板11之间,两块第二腰部板12和第一腰部板11之间分别通过第一腰部紧固件13连接,第一腰部紧固件13连接呈水平设置,第二腰部板12和两块第一腰部板11连接形成类似u字形的结构,第二腰部板12和两块第一腰部板11连接形成夹腰空间,调节两个第一腰部板11之间的距离,从而改变腰托1沿水平方向的宽度,进而适配更多的患者。
36.腰托1还包括导向板14和导向杆15,导向板14设置有两个,两个导向板14分别连接于两个第一腰部板11远离第二腰部板12的一侧,两个导向板14相互靠近的侧壁之间设有间距,导向板14的横向截面呈l字形;导向杆15呈水平设置,导向杆15的一端固定于其中一个导向板14的侧壁、另一端滑动插设于另一个导向板14的侧壁,导向杆15的滑动方向呈水平
设置。
37.还包括背部结构2,背部结构2包括背部连接板21和背部钩板22,背部连接板21的底部连接于第二腰部板12的顶面;背部钩板22设置有两块,两块背部钩板22间隔连接于背部连接板21的顶部,两个背部钩板22的开口均朝向下方。
38.腰托1还包括第三腰部板16和腰部撑板17,第三腰部板16可拆卸连接于第二腰部板12;腰部撑板17设置有两块,两块腰部撑板17连接于第三腰部板16远离第二腰部板12的一侧,两块腰部撑板17之间设有间距,腰部撑板17远离第三腰部板16的侧面呈弧形设置,且上述弧形侧面朝远离第三腰部板16的方向凸出,两个腰部撑板17相抵于人体后腰的位置,两个腰部撑板17相当于给腰部一个有力的支撑点。
39.一个第三腰部板16和两个腰部撑板17之间连接有两个缓冲组件3,缓冲组件3包括缓冲套筒31和缓冲弹簧32,两个缓冲套筒31分别与两个腰部撑板17连接,两个缓冲弹簧32分别位于两个缓冲套筒31内,且两个缓冲弹簧32的轴线分别与缓冲套筒31的轴线重合,两个缓冲弹簧32的一端分别固定于两个腰部撑板17、另一端分别固定于第三腰部板16。
40.腰托1还包括腰部侧板18,腰部侧板18设置有两个,腰部侧板18呈竖直设置,两个腰部侧板18分别与两个第一腰部板11连接,腰部侧板18和第一腰部板11之间连接有第二腰部紧固件19,第二腰部紧固件19呈竖直设置,第二腰部紧固件19具体是螺栓。
41.一个腰部侧板18连接有一个调节组件4,调节组件4包括调节板41,一个调节组件4包括两块调节板41,调节板41呈竖直设置,两块调节板41之间设有间距,同一组的两块调节板41位于腰部侧板18的两侧,腰部侧板18和同一组的两块调节板41之间连接有调节紧固件42,调节紧固件42呈水平设置,松开调节紧固件42可以改变腰部侧板18和调节板41之间形成的夹角,调节组件4连接于第一腰部板11远离第二腰部板12的端部,调节紧固件42具体是螺栓。
42.还包括下肢结构,下肢结构包括大腿板5、小腿板6和连接组件7,具体的,大腿板5、小腿板6和连接组件7成对出现,连接组件7至少具有一组连接端,同一组连接端具有两个,两个连接端之间设有间距,同一组的其中一个连接端与大腿板5转动连接、另一个连接端与小腿板6转动连接,同一组的两个连接端转动形成的两条转动轴线相互平行。
43.还包括驱动结构8,驱动结构8包括空气调压过滤器81、三通管82、导管83、节流阀84和人工肌肉85,空气调压过滤器81连接于背部连接板21,三通管82连接于空气调压过滤器81的导气口,导管83设置有两条,两条导管83分别与三通管82连通且呈可拆卸连接,两条导管83和三通管82连接的位置分别连接有电磁阀,人工肌肉85设置有两条,两条导管83分别与两条人工肌肉85的进气口连通,驱动结构8具有用于改变大腿板5和小腿板6的形变部,形变部的两端分别转动连接于大腿板5和小腿板6,形变部两端之间形成的间距可发生变化,具体的,形变部为人工肌肉85。
44.大腿板5包括第一大腿连接杆51和第二大腿连接杆52,第二大腿连接杆52和第一大腿连接杆51之间连接有大腿紧固件53,大腿紧固件53呈水平设置,大腿限位组件54连接于第一大腿连接杆51或第二大腿连接杆52,具体的,大腿限位组件54连接于第一大腿连接杆51,其中一个连接端转动连接于第一大腿连接杆51或第二大腿连接杆52,具体的,其中一个连接端转动连接于第二大腿连接杆52,形变部的其中一端转动连接于第一大腿连接杆51或第二大腿连接杆52,具体的,形变部的其中一端转动连接有第一安装板86,第一安装板86
连接于第二大腿连接杆52。
45.调节板41的侧壁设置有调节孔411,调节孔411呈弧形设置,第一大腿连接杆51的顶部连接有大腿滑杆511,大腿滑杆511滑动穿设于调节孔411,且大腿滑杆511的滑动方向沿调节孔411的孔型的走向设置
46.大腿板5的一侧连接有大腿限位组件54,大腿限位组件54连接于第一大腿连接杆51,大腿限位组件54具体是使用3d结构打印出来的适用于患者的壳板,大腿限位组件54具有大腿限位通道541和大腿限位开口542,大腿限位通道541的长度方向平行于大腿板5的长度方向,大腿限位开口542远离第一大腿连接杆51设置,大腿限位通道541和大腿限位开口542连通,具体的,大腿内侧组件可连接内衬,且穿戴时可增设绑带,绑带能穿过大腿限位组件54且包裹内衬和患者的大腿,且考虑到穿戴的舒适度,绑带的宽度设置为大腿整体长度的二分之一。
47.小腿板6包括两个第一小腿连接杆61和两个第二小腿连接杆62,对应的,两个第一小腿连接杆61位于一个第二大腿连接杆52的外侧,具体的,连接组件7包括六条连接杆,连接端具体是位于连接杆的转动位置,其中三条连接杆位于第二大腿连接杆52的一侧,另外三条连接杆位于第二大腿连接杆52的另一侧,且其中三条连接杆和另外三条连接杆分别通过三条转轴连接于第二大腿连接杆52上,位于同一侧的三条连接杆间隔均匀设置,对应的,两个第一小腿连接杆61和不同侧的连接杆转动连接;两个第二小腿连接杆62分别连接于两个第一小腿连接杆61的底部,且两个第二小腿连接杆62和两个第一小腿连接杆61之间分别通过小腿紧固件63连接。
48.小腿板6的一侧连接有小腿限位组件64,小腿限位组件64连接于第一小腿连接杆61,小腿限位组件64具体是使用3d结构打印出来的适用于患者的壳板,小腿限位组件64具有小腿限位通道641和小腿限位开口642,小腿限位通道641的长度方向平行于小腿板6的长度方向,小腿限位开口642远离第一小腿连接杆61设置,小腿限位通道641和小腿限位开口642连通,具体的,小腿板6可连接绑带,通过绑带固定穿戴者的小腿。
49.还包括脚部组件9,脚部组件9包括脚部连接板91、脚部支撑板92和脚部支撑条93,脚部连接板91和对应的两个第二小腿连接杆62转动连接;脚部支撑板92连接于脚部连接板91的底部,脚部支撑板92和脚部连接板91之间连接有脚部紧固件94,形变部的其中一端转动连接有第二安装板87,第二安装板87与对应的两个第二小腿连接杆62连接;脚部支撑条93连接于脚部支撑板92的顶面,脚部支撑条93呈弧形设置,脚部支撑条93朝远离脚部支撑板92的方向弯曲,使脚部支撑条93和脚部支撑板92之间设有间距。
50.在使用本发明的外骨骼机器人时,首先调节两个第一腰部板11之间的间距、两个腰部侧板18的间距、调节板41和腰部侧板18的连接位置,然后将背部结构2挂设在人体上,通过人工肌肉85的伸展,从而改变脚部连接板91和第二小腿连接杆62的转动位置,进而改变第二大腿连接杆52和第一小腿连接杆61的转动位置,且改变第二大腿连接杆52和第一小腿连接杆61在平面上的相对位移,同时的,大腿滑杆511会在调节孔411内滑动,因此,本技术的结构提高髋关节和膝关节的自适应性和人体舒适度,在康复时能达到可穿戴、行走方便等效果,同时避免因为机械碰撞出现人机交互不平衡的问题。
51.以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变型或替
换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1