基于互联网的肝胆外科用手术辅助系统及其使用方法与流程
1.本发明涉及医疗器械技术领域,尤其涉及基于互联网的肝胆外科用手术辅助系统及其使用方法。
背景技术:
2.早期手术仅限于用简单的手工方法,在体表进行切、割、缝,如脓肿引流、肿物切除、外伤缝合等。故手术是破坏组织完整性(切开),或使完整性受到破坏的组织复原(缝合)的操作。随着外科学的发展,手术领域不断扩大,已能在人体任何部位进行。应用的器械也不断更新,如手术刀即有电刀、微波刀、超声波刀及激光刀等多种。在治疗心脏预激综合征的手术时,可借助高功能电子计算机定位。有的手术操作也不一定要进行切割来破坏组织,如经各种内窥镜取出胆道、尿路或胃肠道内的结石或异物;经穿刺导管用气囊扩张冠状动脉,或用激光使闭塞的血管再通等。因之手术也有更广泛的含义。但绝大多数手术仍以医师的手工操作为主。
3.肝胆外科是以手术方法治疗肝细胞癌、肝胆管结石、肝炎后肝硬化和重型肝炎所致的急性肝功能衰竭等严重威胁国人健康的重大疾病的科室;临床上在给病人进行肝胆外科手术时,一般采用开腔手术,将患者的腹腔切开后再对患者的病变部位进行手术治疗。
4.在手术过程中主刀医生需要挪动自己的位置以便找到合适的角度进行手术作业,且在手术过程中主刀医生需要长时间弯腰操作,因此会给医生的身体带来很大的负担,为此提出可方便主刀医生长时间进行手术作业和挪动站立位置的医疗器械。
技术实现要素:
5.本发明的目的是为了解决现有技术中无法客观精准的检查、无法在不同的敲击力度下进行检查、需要人工敲击膝腱的问题,而提出的一种结构紧凑的基于互联网的肝胆外科用手术辅助系统及其使用方法。
6.为了实现上述目的,本发明采用了如下技术方案:
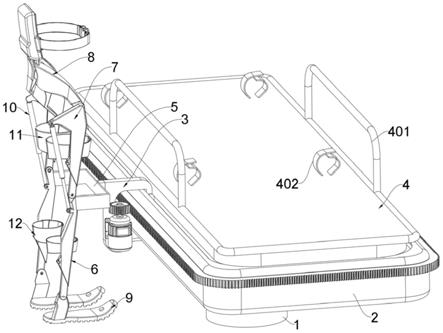
7.基于互联网的肝胆外科用手术辅助系统,包括底柱,所述底柱的上端固定连接有固定板,所述固定板的上端固定连接有病床,所述固定板的一侧设置有位移机构,所述底柱的一侧设置有小腿机构,所述小腿机构的上侧设置有大腿机构,所述大腿机构的上侧设置有绑腰机构,所述大腿机构的一侧设置有将大腿机构和小腿机构相连接的缓冲机构,所述小腿机构的下侧设置有两个脚垫板。
8.优选的,所述位移机构包括固定架、正反电机、齿条、齿轮、两个滑槽和两个滑轮,两个所述滑槽分别开凿于固定板的上下两端,两个所述滑轮分别滑动连接于两个滑槽的内壁,所述固定架分别转动连接于两个滑轮的相远离端,所述正反电机固定连接于固定架的侧端,所述齿轮固定连接于正反电机的输出轴,所述齿条固定连接于固定板的侧端,所述齿轮与齿条啮合连接。
9.优选的,所述固定架的侧端固定连接有u型固定框,所述病床的上端两侧均固定连
接有护栏,所述病床的上端固定连接有四个第一绑带。
10.优选的,所述小腿机构包括两个第一固定框、两个第一空槽、两个第一插杆、多个第一限位槽、两个第一固定块、两个第一滑杆和两个第一弹簧,两个所述第一固定框均固定连接于u型固定框的侧端,两个所述第一空槽分别开凿于两个第一固定框的侧端,两个所述第一插杆分别滑动连接于两个第一空槽的内壁,多个所述第一限位槽分别开凿于两个第一插杆的上端,两个所述第一固定块分别固定连接于两个第一固定框的上端,两个所述第一滑杆分别滑动贯穿于两个第一固定块的侧端且两个第一滑杆分别滑动贯穿于两个第一固定框的上端,两个所述第一弹簧分别套设于两个第一滑杆的表面,两个所述第一插拔杆分别固定连接于两个第一滑杆的顶端,两个所述第一插拔杆分别卡接于两个第一固定块的顶端。
11.优选的,所述大腿机构包括两个第二固定框、两个第二空槽、两个第二插杆、多个第二限位槽、两个第二固定块、两个第二弹簧和两个第二弹簧,两个所述第二固定框分别转动连接于两个第一固定框的上端,两个所述第二空槽分别开凿于两个第二固定框的侧端,两个所述第二插杆分别滑动连接于两个第二空槽的内壁,多个所述第二限位槽分别开凿于两个第二插杆的上端,两个所述第二固定块分别固定连接于两个第二固定框的上端,两个所述第二滑杆分别滑动贯穿于两个第二固定块的侧端且两个第二滑杆分别滑动贯穿于两个第二固定框的上端,两个所述第二弹簧分别套设于两个第二滑杆的表面,两个所述第二插拔杆分别固定连接于两个第二滑杆的顶端,两个所述第二插拔杆分别卡接于两个第二固定块的顶端。
12.优选的,所述绑腰机构包括靠背、护腰带、两个护座、坐垫和两个弹簧布,两个所述护座分别转动连接于两个第二固定框的相靠近端,两个所述坐垫分别固定连接于两个护座的下端,两个所述弹簧布均固定连接于两个护座的相靠近端,所述靠背固定连接于两个护座的上端,所述护腰带固定连接于靠背的侧端。
13.优选的,两个所述脚垫板分别转动连接于两个第一插杆的下端,位于左侧的所述脚垫板的上端设置有正转开关,位移右侧的所述脚垫板的上端设置有反转开关,所述正转开关和反转开关均与正反电机电性连接。
14.优选的,所述缓冲机构包括两个压筒、两个缓冲杆、两个滑块和两个第三弹簧,两个所述压筒分别转动连接于两个第二固定框的侧端,两个所述缓冲杆分别转动连接于两个第一固定框的侧端,且两个所述缓冲杆分别滑动连接于两个压筒的内壁,两个所述滑块分别固定连接于两个缓冲杆的侧端,两个所述第三弹簧分别套设于两个缓冲杆的表面,且两个所述第三弹簧分别固定连接于两个第三弹簧的侧端。
15.优选的,两个所述第二固定框的相靠近端均固定连接有第二绑带,两个所述第一固定框的相靠近端均固定连接有第三绑带。
16.与现有技术相比,本发明提供了基于互联网的肝胆外科用手术辅助系统,具备以下有益效果:
17.1、该基于互联网的肝胆外科用手术辅助系统通过小腿机构中设置的两个第一插拔杆,可根据主刀医生的小腿长短调整两个第一固定框和两个第一插杆的位置关系,以便适用于不同主刀医生的身材长短。
18.2、该基于互联网的肝胆外科用手术辅助系统通过大腿机构中设置的两个第二插
拔杆,可根据主刀医生的大腿长短来调整两个第二固定框和两个第二插杆的位置关系,以便适用于不同主刀医生的身材长短。
19.3、该基于互联网的肝胆外科用手术辅助系统两个小腿分别通过两个第三绑带绑定在两个第一固定框的相靠近端,两条大腿分别通过两个第二绑带绑定在两个第二固定框的相靠近端,主刀医生坐在两个坐垫的上端,并通过护腰带将主刀医生的腹部包裹住,背部与两个护座贴合,使得主刀医生可与本发明贴合,方便医生原地休息。
20.4、该基于互联网的肝胆外科用手术辅助系统通过分别踩动两个脚垫板上的开关来控制正反电机的正反转,踩下左侧的脚垫板上端的正转开关,正反电机正转,正反电机带动齿轮旋转,齿轮与齿条啮合,且固定正反电机的固定架通过两个滑轮滑动在两个滑槽的内壁,因此即可带动固定架沿着齿条的边界进行顺时针位移,从而带动主刀医生沿着固定板边缘顺时针位移,无需医生自己挪动调整位置,主刀医生踩动右侧的脚垫板的上端的反转开关即可带动主刀医生沿着固定板边缘逆时针位移。
21.5、该基于互联网的肝胆外科用手术辅助系统通过两个第二固定框挤压两个压筒沿着两个缓冲杆挤压,两个滑块紧密卡接在两个压筒的内壁中,两个压筒的空气受到滑块的挤压后限制两个缓冲杆的行程,在医生不挪动时,两个第三弹簧抵住两个压筒的内壁后将缓冲杆向外回弹,将两个第二固定框和两个第一固定框绷直,方便医生在挪动大腿时可得到充分的休息。
22.本发明中,通过将主刀医生的大腿与大腿机构绑定,小腿与小腿机构绑定,大腿和小腿通过缓冲机构进行缓冲,医生腹部捆绑在绑腰机构处,将医生的体重通过两个脚垫板传递到地面上,通过分别踩动两个脚垫板上端的正反转开关控制位移机构沿着固定板的边缘进行位移,无需医生自己挪动位置,避免了主刀医生需要挪动自己的位置以便找到合适的角度进行手术作业,且在手术过程中主刀医生需要长时间弯腰操作,会给医生的身体带来很大的负担的问题。
附图说明
23.图1为本发明提出的基于互联网的肝胆外科用手术辅助系统的主视图;
24.图2为本发明提出的基于互联网的肝胆外科用手术辅助系统的位移机构处主视图;
25.图3为本发明提出的基于互联网的肝胆外科用手术辅助系统的位移机构处剖面图;
26.图4为本发明提出的基于互联网的肝胆外科用手术辅助系统的u型固定框处主视图;
27.图5为本发明提出的基于互联网的肝胆外科用手术辅助系统的u型固定框处侧视图;
28.图6为本发明提出的基于互联网的肝胆外科用手术辅助系统的绑腰机构处主视图;
29.图7为本发明提出的基于互联网的肝胆外科用手术辅助系统的大腿机构爆炸图;
30.图8为本发明提出的基于互联网的肝胆外科用手术辅助系统的小腿机构爆炸图;
31.图9为本发明提出的基于互联网的肝胆外科用手术辅助系统的缓冲机构处剖面
图。
32.图中:1、底柱;2、固定板;3、位移机构;301、滑槽;302、滑轮;303、固定架;304、正反电机;305、齿条;306、齿轮;4、病床;401、护栏;402、第一绑带;5、u型固定框;6、小腿机构;601、第一固定框;602、第一空槽;603、第一插杆;604、第一限位槽;605、第一固定块;606、第一滑杆;607、第一弹簧;608、第一插拔杆;7、大腿机构;701、第二固定框;702、第二空槽;703、第二插杆;704、第二限位槽;705、第二固定块;706、第二滑杆;707、第二弹簧;708、第二插拔杆;8、绑腰机构;801、护座;802、坐垫;803、弹簧布;804、靠背;805、护腰带;9、脚垫板;10、缓冲机构;1001、压筒;1002、缓冲杆;1003、滑块;1004、第三弹簧;11、第二绑带;12、第三绑带。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
34.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
35.实施例1:
36.参照图1-9,基于互联网的肝胆外科用手术辅助系统,包括底柱1,底柱1的上端固定连接有固定板2,固定板2的上端固定连接有病床4,固定板2的一侧设置有位移机构3,底柱1的一侧设置有小腿机构6,小腿机构6的上侧设置有大腿机构7,大腿机构7的上侧设置有绑腰机构8,大腿机构7的一侧设置有将大腿机构7和小腿机构6相连接的缓冲机构10,小腿机构6的下侧设置有两个脚垫板9,通过将主刀医生的大腿与大腿机构7绑定,小腿与小腿机构6绑定,大腿和小腿通过缓冲机构10进行缓冲,医生腹部捆绑在绑腰机构8处,将医生的体重通过两个脚垫板9传递到地面上,通过分别踩动两个脚垫板9上端的正转开关和反转开关来控制位移机构3沿着固定板2的边缘进行位移,无需医生自己挪动位置,避免了主刀医生需要挪动自己的位置以便找到合适的角度进行手术作业,且在手术过程中主刀医生需要长时间弯腰操作,会给医生的身体带来很大的负担的问题。
37.本发明中,位移机构3包括固定架303、正反电机304、齿条305、齿轮306、两个滑槽301和两个滑轮302,两个滑槽301分别开凿于固定板2的上下两端,两个滑轮302分别滑动连接于两个滑槽301的内壁,固定架303分别转动连接于两个滑轮302的相远离端,正反电机304固定连接于固定架303的侧端,齿轮306固定连接于正反电机304的输出轴,齿条305固定连接于固定板2的侧端,齿轮306与齿条305啮合连接,当正反电机304正转时,正反电机304带动齿轮306旋转,齿轮306与齿条305啮合,且固定正反电机304的固定架303通过两个滑轮302滑动在两个滑槽301的内壁,因此即可带动固定架303沿着齿条305的边界进行顺时针位移,当正反电机304反转时,即可带动固定架303沿着齿条305的边界进行逆时针位移,固定架303的侧端固定连接有u型固定框5,病床4的上端两侧均固定连接有护栏401,病床4的上端固定连接有四个第一绑带402,u型固定框5用于连接位移机构3和小腿机构6,两个护栏401防止病人挪动到床下,四个第一绑带402用于固定病人的四肢。
38.本发明中,小腿机构6包括两个第一固定框601、两个第一空槽602、两个第一插杆603、多个第一限位槽604、两个第一固定块605、两个第一滑杆606和两个第一弹簧607,两个第一固定框601均固定连接于u型固定框5的侧端,两个第一空槽602分别开凿于两个第一固定框601的侧端,两个第一插杆603分别滑动连接于两个第一空槽602的内壁,多个第一限位槽604分别开凿于两个第一插杆603的上端,两个第一固定块605分别固定连接于两个第一固定框601的上端,两个第一滑杆606分别滑动贯穿于两个第一固定块605的侧端且两个第一滑杆606分别滑动贯穿于两个第一固定框601的上端,两个第一弹簧607分别套设于两个第一滑杆606的表面,两个第一插拔杆608分别固定连接于两个第一滑杆606的顶端,两个第一插拔杆608分别卡接于两个第一固定块605的顶端。
39.本发明中,大腿机构7包括两个第二固定框701、两个第二空槽702、两个第二插杆703、多个第二限位槽704、两个第二固定块705、两个第二弹簧707和两个第二弹簧707,两个第二固定框701分别转动连接于两个第一固定框601的上端,两个第二空槽702分别开凿于两个第二固定框701的侧端,两个第二插杆703分别滑动连接于两个第二空槽702的内壁,多个第二限位槽704分别开凿于两个第二插杆703的上端,两个第二固定块705分别固定连接于两个第二固定框701的上端,两个第二滑杆706分别滑动贯穿于两个第二固定块705的侧端且两个第二滑杆706分别滑动贯穿于两个第二固定框701的上端,两个第二弹簧707分别套设于两个第二滑杆706的表面,两个第二插拔杆708分别固定连接于两个第二滑杆706的顶端,两个第二插拔杆708分别卡接于两个第二固定块705的顶端,根据主刀医生的小腿长短拔出两个第一插拔杆608,两个第一插拔杆608带动两个第一滑杆606沿着两个第一固定块605向外拔出,向上提拉两个第一固定框601,调整到合适位置后松开两个第一插拔杆608,两个第一滑杆606通过两个第一弹簧607的回弹力带动两个第一滑杆606插入合适的第一限位槽604的内槽,两个第一插拔杆608卡在两个第一固定块605的侧端,因此将第一插杆603限制在第一固定框601处,同理根据医生大腿长短拔出两个第二插拔杆708来将第二插杆703调整与第二固定框701的距离长短。
40.本发明中,绑腰机构8包括靠背804、护腰带805、两个护座801、坐垫802和两个弹簧布803,两个护座801分别转动连接于两个第二固定框701的相靠近端,两个坐垫802分别固定连接于两个护座801的下端,两个弹簧布803均固定连接于两个护座801的相靠近端,靠背804固定连接于两个护座801的上端,护腰带805固定连接于靠背804的侧端,腰部通过推动两个坐垫802和两个护座801,两个护座801通过与两个第二固定框701卡和配合使得两个护座801只能朝向固定板2方向弯腰,当两个护座801卡在两个第二固定框701的侧端无法继续转动,将医生的腰部拖住方便医生原地休息,主刀医生坐在两个坐垫802时,自身重量通过两个护座801传递到两个第二固定框701处,两个第二固定框701将压力传递到两个第一固定框601处,两个第一固定框601将压力继续传递到两个脚垫板9,两个脚垫板9将压力传递到地面,两个脚垫板9分别转动连接于两个第一插杆603的下端,位于左侧的脚垫板9的上端设置有正转开关,位移右侧的脚垫板9的上端设置有反转开关,正转开关和反转开关均与正反电机304电性连接,主刀医生通过分别踩动两个脚垫板9上端设置的正转开关和反转开关来控制正反电机304的正反转,踩下左侧的脚垫板9上端的正转开关,正反电机304正转,正反电机304带动齿轮306旋转,齿轮306与齿条305啮合,且固定正反电机304的固定架303通过两个滑轮302滑动在两个滑槽301的内壁,因此即可带动固定架303沿着齿条305的边界进
行顺时针位移,从而带动主刀医生沿着固定板2边缘顺时针位移,无需医生自己挪动调整位置,主刀医生踩动右侧的脚垫板9的反转开关即可带动主刀医生沿着固定板2边缘逆时针位移。
41.实施例2:
42.参照图1-9,基于互联网的肝胆外科用手术辅助系统,包括底柱1,底柱1的上端固定连接有固定板2,固定板2的上端固定连接有病床4,固定板2的一侧设置有位移机构3,底柱1的一侧设置有小腿机构6,小腿机构6的上侧设置有大腿机构7,大腿机构7的上侧设置有绑腰机构8,大腿机构7的一侧设置有将大腿机构7和小腿机构6相连接的缓冲机构10,小腿机构6的下侧设置有两个脚垫板9,通过将主刀医生的大腿与大腿机构7绑定,小腿与小腿机构6绑定,大腿和小腿通过缓冲机构10进行缓冲,医生腹部捆绑在绑腰机构8处,将医生的体重通过两个脚垫板9传递到地面上,通过分别踩动两个脚垫板9上端的正转开关和反转开关来控制位移机构3沿着固定板2的边缘进行位移,无需医生自己挪动位置,避免了主刀医生需要挪动自己的位置以便找到合适的角度进行手术作业,且在手术过程中主刀医生需要长时间弯腰操作,会给医生的身体带来很大的负担的问题。
43.本发明中,位移机构3包括固定架303、正反电机304、齿条305、齿轮306、两个滑槽301和两个滑轮302,两个滑槽301分别开凿于固定板2的上下两端,两个滑轮302分别滑动连接于两个滑槽301的内壁,固定架303分别转动连接于两个滑轮302的相远离端,正反电机304固定连接于固定架303的侧端,齿轮306固定连接于正反电机304的输出轴,齿条305固定连接于固定板2的侧端,齿轮306与齿条305啮合连接,当正反电机304正转时,正反电机304带动齿轮306旋转,齿轮306与齿条305啮合,且固定正反电机304的固定架303通过两个滑轮302滑动在两个滑槽301的内壁,因此即可带动固定架303沿着齿条305的边界进行顺时针位移,当正反电机304反转时,即可带动固定架303沿着齿条305的边界进行逆时针位移,固定架303的侧端固定连接有u型固定框5,病床4的上端两侧均固定连接有护栏401,病床4的上端固定连接有四个第一绑带402,u型固定框5用于连接位移机构3和小腿机构6,两个护栏401防止病人挪动到床下,四个第一绑带402用于固定病人的四肢。
44.本发明中,小腿机构6包括两个第一固定框601、两个第一空槽602、两个第一插杆603、多个第一限位槽604、两个第一固定块605、两个第一滑杆606和两个第一弹簧607,两个第一固定框601均固定连接于u型固定框5的侧端,两个第一空槽602分别开凿于两个第一固定框601的侧端,两个第一插杆603分别滑动连接于两个第一空槽602的内壁,多个第一限位槽604分别开凿于两个第一插杆603的上端,两个第一固定块605分别固定连接于两个第一固定框601的上端,两个第一滑杆606分别滑动贯穿于两个第一固定块605的侧端且两个第一滑杆606分别滑动贯穿于两个第一固定框601的上端,两个第一弹簧607分别套设于两个第一滑杆606的表面,两个第一插拔杆608分别固定连接于两个第一滑杆606的顶端,两个第一插拔杆608分别卡接于两个第一固定块605的顶端。
45.本发明中,大腿机构7包括两个第二固定框701、两个第二空槽702、两个第二插杆703、多个第二限位槽704、两个第二固定块705、两个第二弹簧707和两个第二弹簧707,两个第二固定框701分别转动连接于两个第一固定框601的上端,两个第二空槽702分别开凿于两个第二固定框701的侧端,两个第二插杆703分别滑动连接于两个第二空槽702的内壁,多个第二限位槽704分别开凿于两个第二插杆703的上端,两个第二固定块705分别固定连接
于两个第二固定框701的上端,两个第二滑杆706分别滑动贯穿于两个第二固定块705的侧端且两个第二滑杆706分别滑动贯穿于两个第二固定框701的上端,两个第二弹簧707分别套设于两个第二滑杆706的表面,两个第二插拔杆708分别固定连接于两个第二滑杆706的顶端,两个第二插拔杆708分别卡接于两个第二固定块705的顶端,根据主刀医生的小腿长短拔出两个第一插拔杆608,两个第一插拔杆608带动两个第一滑杆606沿着两个第一固定块605向外拔出,向上提拉两个第一固定框601,调整到合适位置后松开两个第一插拔杆608,两个第一滑杆606通过两个第一弹簧607的回弹力带动两个第一滑杆606插入合适的第一限位槽604的内槽,两个第一插拔杆608卡在两个第一固定块605的侧端,因此将第一插杆603限制在第一固定框601处,同理根据医生大腿长短拔出两个第二插拔杆708来将第二插杆703调整与第二固定框701的距离长短。
46.本发明中,绑腰机构8包括靠背804、护腰带805、两个护座801、坐垫802和两个弹簧布803,两个护座801分别转动连接于两个第二固定框701的相靠近端,两个坐垫802分别固定连接于两个护座801的下端,两个弹簧布803均固定连接于两个护座801的相靠近端,靠背804固定连接于两个护座801的上端,护腰带805固定连接于靠背804的侧端,腰部通过推动两个坐垫802和两个护座801,两个护座801通过与两个第二固定框701卡和配合使得两个护座801只能朝向固定板2方向弯腰,当两个护座801卡在两个第二固定框701的侧端无法继续转动,将医生的腰部拖住方便医生原地休息,主刀医生坐在两个坐垫802时,自身重量通过两个护座801传递到两个第二固定框701处,两个第二固定框701将压力传递到两个第一固定框601处,两个第一固定框601将压力继续传递到两个脚垫板9,两个脚垫板9将压力传递到地面,两个脚垫板9分别转动连接于两个第一插杆603的下端,位于左侧的脚垫板9的上端设置有正转开关,位移右侧的脚垫板9的上端设置有反转开关,正转开关和反转开关均与正反电机304电性连接,主刀医生通过分别踩动两个脚垫板9上端设置的正转开关和反转开关来控制正反电机304的正反转,踩下左侧的脚垫板9上端的正转开关,正反电机304正转,正反电机304带动齿轮306旋转,齿轮306与齿条305啮合,且固定正反电机304的固定架303通过两个滑轮302滑动在两个滑槽301的内壁,因此即可带动固定架303沿着齿条305的边界进行顺时针位移,从而带动主刀医生沿着固定板2边缘顺时针位移,无需医生自己挪动调整位置,主刀医生踩动右侧的脚垫板9的反转开关即可带动主刀医生沿着固定板2边缘逆时针位移。
47.本发明中,缓冲机构10包括两个压筒1001、两个缓冲杆1002、两个滑块1003和两个第三弹簧1004,两个压筒1001分别转动连接于两个第二固定框701的侧端,两个缓冲杆1002分别转动连接于两个第一固定框601的侧端,且两个缓冲杆1002分别滑动连接于两个压筒1001的内壁,两个滑块1003分别固定连接于两个缓冲杆1002的侧端,两个第三弹簧1004分别套设于两个缓冲杆1002的表面,且两个第三弹簧1004的一端分别固定连接于两个第三弹簧1004的侧端,两个第三弹簧1004的另一端分别固定连接于两个压筒的内壁,主刀医生挪动大腿时,两个第二固定框701前后挪动,两个第二固定框701挤压两个压筒1001沿着两个缓冲杆1002挤压,两个滑块1003紧密卡接在两个压筒1001的内壁中,两个压筒1001的空气受到滑块1003的挤压后限制两个缓冲杆1002的行程,在医生不挪动时,两个第三弹簧1004抵住两个压筒1001的内壁后将缓冲杆1002向外回弹,将两个第二固定框701和两个第一固定框601绷直,两个第二固定框701的相靠近端均固定连接有第二绑带11,两个第一固定框
601的相靠近端均固定连接有第三绑带12,两个小腿分别通过两个第三绑带12绑定在两个第一固定框601的相靠近端,两条大腿分别通过两个第二绑带11绑定在两个第二固定框701的相靠近端。
48.基于互联网的肝胆外科用手术辅助系统的使用方法,包括以下步骤:
49.s1:使用前,主刀医生踩在两个脚垫板9的上端,根据主刀医生的小腿长短拔出两个第一插拔杆608,两个第一插拔杆608带动两个第一滑杆606沿着两个第一固定块605向外拔出,向上提拉两个第一固定框601,调整到合适位置后松开两个第一插拔杆608,两个第一滑杆606通过两个第一弹簧607的回弹力带动两个第一滑杆606插入合适的第一限位槽604的内槽,两个第一插拔杆608卡在两个第一固定块605的侧端,因此将第一插杆603限制在第一固定框601处,同理根据医生大腿长短拔出两个第二插拔杆708来将第二插杆703调整与第二固定框701的距离长短;
50.s2:两个小腿分别通过两个第三绑带12绑定在两个第一固定框601的相靠近端,两条大腿分别通过两个第二绑带11绑定在两个第二固定框701的相靠近端,主刀医生坐在两个坐垫802的上端,并通过护腰带805将主刀医生的腹部包裹住,背部与两个护座801贴合;
51.s3:主刀医生通过分别踩动两个脚垫板9上端设置的正转开关和反转开关来控制正反电机304的正反转,踩下左侧的脚垫板9的正转开关,正反电机304正转,正反电机304带动齿轮306旋转,齿轮306与齿条305啮合,且固定正反电机304的固定架303通过两个滑轮302滑动在两个滑槽301的内壁,因此即可带动固定架303沿着齿条305的边界进行顺时针位移,从而带动主刀医生沿着固定板2边缘顺时针位移,无需医生自己挪动调整位置,主刀医生踩动右侧的脚垫板9上端的反转开关即可带动主刀医生沿着固定板2边缘逆时针位移;
52.s4:主刀医生站立时需要根据手术情况站直或弯曲腰部,腰部通过推动两个坐垫802和两个护座801,两个护座801通过与两个第二固定框701卡和配合使得两个护座801只能朝向固定板2方向弯腰,当两个护座801卡在两个第二固定框701的侧端无法继续转动,将医生的腰部拖住方便医生原地休息,主刀医生坐在两个坐垫802时,自身重量通过两个护座801传递到两个第二固定框701处,两个第二固定框701将压力传递到两个第一固定框601处,两个第一固定框601将压力继续传递到u型固定框5处,u型固定框5将压力传递到固定板2;
53.s5:主刀医生挪动大腿时,两个第二固定框701前后挪动,两个第二固定框701挤压两个压筒1001沿着两个缓冲杆1002挤压,两个滑块1003紧密卡接在两个压筒1001的内壁中,两个压筒1001的空气受到滑块1003的挤压后限制两个缓冲杆1002的行程,在医生不挪动时,两个第三弹簧1004抵住两个压筒1001的内壁后将缓冲杆1002向外回弹,将两个第二固定框701和两个第一固定框601绷直。
54.然而,如本领域技术人员所熟知的,正反电机304的工作原理和接线方法是司空见惯的,其均属于常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配。
55.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1