患者运送台车以及粒子射线照射系统的制作方法
1.本发明涉及患者运送台车以及粒子射线照射系统。
背景技术:
2.在粒子射线治疗中,进行如下的治疗法,即,将从加速器取出的质子射线、重粒子射线、或者中子射线等粒子射线向病灶和癌等肿瘤部分等(靶向)进行照射。为了提高粒子射线对靶向的剂量浓度,并且抑制对正常组织的影响,将粒子射线向靶向高精度地进行照射。
3.以往,在将粒子射线向患者照射之前,使患者搭乘在设有粒子射线的照射喷嘴的、在进行粒子射线治疗的房间(下面称为“粒子射线治疗室”)中放置的治疗台上,将从照射喷嘴照射的粒子射线的位置与应该照射粒子射线的部位进行位置吻合(称为患者位置设定或定位处理)。即,对粒子射线照射位置与患者位置进行调整,以使从照射喷嘴照射的粒子射线高精度地击中患者体内的靶向。
4.在患者位置设定中,首先,为了抑制患者与治疗台之间的偏差,使用固定件,将患者固定在治疗台的顶板。接着,利用在粒子射线治疗室内设置的激光指示器等,从患者的皮肤之上进行粒子射线所照射的位置与应该照射粒子射线的部位之间的粗定位。之后,拍摄患者的x射线图像、ct图像、或者mri图像,观察上述图像并对患者所搭乘的顶板的位置和倾斜度等进行调整,高精度(例如mm单位)地确定照射粒子射线的位置。然后,在患者位置设定后,开始粒子射线的治疗。
5.通常,患者位置设定需要数分钟~数十分钟的时间,占用粒子射线治疗的一大半治疗时间。粒子射线治疗室内长时间的患者位置设定也增加了每位患者占用粒子射线治疗室的时间。其结果是,无法增加单位时间内治疗的人数,挤压为了确保安全治疗照射而进行粒子射线质保(quality assurance(qa))测量的时间,增大医生、护士、及放射科医生等医疗从业人员的负担。
6.(日本)专利第6596679号公开了如下的发明,即,解决了因向在粒子射线治疗室设置的治疗台转移患者所搭乘的顶板而产生的位置偏差、以及永久设置在粒子射线治疗室内的固定治疗台使粒子射线治疗室增大、妨碍qa测量用设备的设置等问题。(日本)专利第6596679号公开了一种患者运送台车,该患者运送台车具有:顶板,其搭乘患者;驱动部,其使所述顶板平行移动和/或旋转;驱动控制部,其根据从在粒子射线治疗室设置的患者位置设定装置接收到的、所述顶板的平行移动量和/或旋转量,控制由所述驱动部进行的所述顶板的平行移动和/或旋转;底座锁止机构,其与在所述粒子射线治疗室设置的锁止接受部卡合,将患者运送台车固定在所述粒子射线治疗室。
7.美国专利第9554953号公开了一种全向底盘,该全向底盘能够在运动平面上向任意的方向移动医疗设备。美国专利第9554953号的底盘具有为了改变医疗设备移动的方向,不使该医疗设备旋转地在任意的规定方向上改变方向的结构。(日本)特开2018-122013号公报公开了如下的发明,即,相对于现有的用于患者位置设定的、具有在治疗室固定的机械
臂的治疗台,实现了患者方便乘降的顶板位置的可动范围。
技术实现要素:
8.发明所要解决的技术问题
9.在(日本)专利第6596679号所述的技术中,能够缩短粒子射线治疗室的占用时间,改善治疗效率。另一方面,因为患者仍然固定在患者运送台车的顶板,向粒子射线治疗室移送,所以,有时为了安全,护士等看护人员会与患者运送台车一起移动。在医院里,要求患者运送台车在存在各种障碍物、对其他患者等的关照、以及斜坡等的状况下稳定地行驶。另外,(日本)特开2018-122013号公报所述的技术是在治疗室的地板下埋入的固定式治疗台,需要大型装置。
10.鉴于上述问题,本发明的目的在于提供一种患者运送台车以及粒子射线照射系统。
11.用于解决技术问题的技术方案
12.本发明包括如下的方式。
13.〔1〕一种患者运送台车,该患者运送台车(100)具有:
14.顶板(110),其搭乘患者;
15.顶板驱动部(120),其使所述顶板移动和/或旋转;
16.运送部(130),其具有载置所述顶板驱动部的底座(131);
17.所述顶板驱动部具有:
18.第一旋转机构(121),其与所述顶板连接,使所述顶板旋转而构成;
19.第一臂部(124),其与所述第一旋转机构连接;
20.第二旋转机构(122),其与所述第一臂部连接,使所述第一臂部旋转而构成;
21.第二臂部(125),其与所述第二旋转机构连接;
22.第三旋转机构(123),其与所述第二臂部连接,使所述第二臂部旋转而构成;
23.支承部(126),其与所述第三旋转机构连接;
24.在所述患者运送台车的原始位置状态下,所述第一旋转机构、所述第一臂部、所述第二旋转机构、所述第二臂部、所述第三旋转机构、以及所述支承部在高度方向(z轴)上与所述顶板重叠而构成,以使所述顶板、所述第一臂部、以及所述第二臂部在高度方向(z轴)上为折叠的状态,
25.所述支承部在俯视中固定在与所述底座的中心偏离的位置,由此,在所述底座确保看护人员可搭乘的看护人员空间(135),
26.所述支承部在所述底座设置的凹部(138)进行固定。
27.〔2〕如〔1〕所述的患者运送台车,
28.使围绕所述z轴的旋转为偏摆旋转,当设定在与所述z轴垂直的平面上相互正交的x轴及y轴时,使围绕所述x轴的旋转为侧倾旋转,使围绕所述y轴的旋转为俯仰旋转,
29.所述第一旋转机构使所述顶板侧倾旋转、俯仰旋转、以及偏摆旋转而构成,
30.所述第二旋转机构使所述第一臂部侧倾旋转及偏摆旋转而构成,
31.所述第三旋转机构使所述第二臂部侧倾旋转及偏摆旋转而构成。
32.〔3〕如〔1〕或〔2〕所述的患者运送台车,
33.在所述底座安装有三个以上车轮(132),所述车轮为全向驱动车轮。
34.〔4〕一种粒子射线照射系统,该粒子射线照射系统(200)包括:
35.〔1〕~〔3〕中任一项所述的患者运送台车;
36.粒子射线照射装置(210),其向患者照射粒子射线;
37.综合控制装置(260),其控制所述患者运送台车的行驶;
38.所述综合控制装置包括:
39.路径生成部(261),其生成从设有所述粒子射线照射系统的设施内的起点连结终点的多条路径;
40.交通管制部(262),其指示所述患者运送台车通过从由所述路径生成部生成的多条路径之中选择的路径。
41.〔5〕如〔4〕所述的粒子射线照射系统,
42.所述运送部还具有传感器(136),
43.所述患者运送台车在由所述综合控制装置指示的路径中移动期间,由所述传感器获取包括所述路径的空间的信息,向所述综合控制装置发送通过将所述空间的信息与已知的地图信息进行对比而算出的所述患者运送台车的位置信息,
44.所述患者运送台车在所述路径移动期间,当由所述传感器检测出障碍物时,将检测信号向所述综合控制装置发送,
45.所述综合控制装置的所述交通管制部指示所述患者运送台车以从由所述路径生成部生成的多条路径之中通过其它的路径。
46.〔6〕如〔4〕或者〔5〕所述的粒子射线照射系统,
47.所述起点为所述设施内的定位室,所述终点为所述设施内的粒子射线治疗室,
48.所述患者运送台车维持所述原始位置状态,从所述定位室向所述粒子射线治疗室移动。
49.〔7〕如〔4〕~〔6〕中任一项所述的粒子射线照射系统,
50.所述粒子射线照射系统还包括:
51.患者位置设定装置(220、230),其为了使患者的患部相对于所述粒子射线的等中心进行定位,而分别设置在所述设施的定位室及粒子射线治疗室;
52.定位室管理装置(240),其对所述定位室的所述患者位置设定装置(220)及进入所述定位室的所述患者运送台车进行管理;
53.治疗室管理装置(250),其对所述粒子射线治疗室的所述患者位置设定装置(230)及进入所述粒子射线治疗室的所述患者运送台车进行管理;
54.所述定位室管理装置与所述治疗室管理装置经由网络(270),共用利用所述定位室及所述粒子射线治疗室的各所述患者位置设定装置生成的定位数据,
55.所述患者运送台车还具有底座锁止机构(137),所述底座锁止机构(137)与在所述定位室及所述粒子射线治疗室分别设置的锁止接受部(225、235)卡合,将所述患者运送台车固定在所述定位室及所述粒子射线治疗室,
56.当所述底座锁止机构与所述锁止接受部卡合时,所述运送部成为待机状态,所述顶板驱动部从待机状态恢复,
57.当解除所述底座锁止机构与所述锁止接受部的卡合时,所述运送部从待机状态恢
复,所述顶板驱动部成为待机状态。
58.〔8〕如〔7〕所述的粒子射线照射系统
59.在粒子射线照射期间,当所述治疗室管理装置从所述顶板驱动部和/或所述运送部接收到出错信号时,向所述粒子射线照射装置发送信号,使所述粒子射线照射装置的粒子射线的照射停止。
附图说明
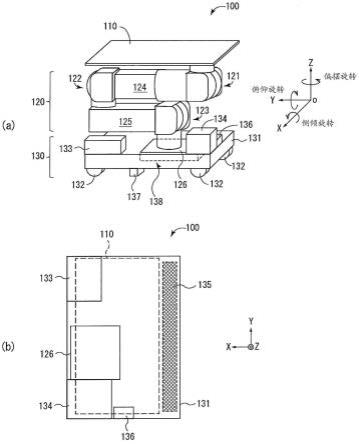
60.图1是本发明的一个实施方式的患者运送台车的结构概要图。
61.图2是说明患者运送台车的顶板的移动及旋转的图。
62.图3是患者运送台车的驱动控制部的块图。
63.图4是患者运送台车的运送控制部的块图。
64.图5是设施内的粒子射线照射系统的概要图。
65.图6是粒子射线照射系统的定位室的概要图。
66.图7是粒子射线照射系统的粒子射线治疗室的概要图。
67.图8是粒子射线照射系统的控制块图。
68.图9是说明患者运送台车的路径的图。
69.图10是表示使用粒子射线照射系统的粒子射线治疗的一系列流程的流程图。
具体实施方式
70.〔患者运送台车〕
71.针对本发明的一个实施方式的患者运送台车100进行说明。图1(a)是患者运送台车100的结构概要图,图1(b)是其俯视图。
72.在本发明中,使患者运送台车100的高度方向为z轴,使在与z轴垂直的平面上相互正交的轴为x轴及y轴。使围绕x轴的旋转为侧倾旋转,使围绕y轴的旋转为俯仰旋转,使围绕z轴的旋转为偏摆旋转。在图1的例子中,在俯视中,使长方形状的顶板110的短边方向为x轴,使顶板11的长边方向为y轴,使患者运送台车100的高度方向为z轴。需要说明的是,在顶板110为椭圆形状的情况下,也可以使短轴为x轴、长轴为y轴、以及与两轴垂直的轴为z轴。
73.患者运送台车100具有:搭乘患者的顶板110、使顶板110移动及旋转的顶板驱动部120、以及搭载顶板110及顶板驱动部120并移动的运送部130。
74.顶板110在俯视中不限于长方形状(长方形或者正方形),也可以为椭圆形状(包括圆形)。顶板110具有即使患者搭乘也稳定(不弯曲)、且可以固定使患者不能活动的形状及尺寸。
75.顶板110具有用于固定患者身体的固定件(未图示)。固定件是固定患者头部的器具、固定患者手脚的器具、固定患者躯干的器具、和/或顺着患者身体的形状而形成的缓冲材料等。另外,顶板110也可以使与患者的头部、腿部,和/或躯干接触的部分等顶板110的一部分可倾斜地构成。另外,也可以在顶板110设有呼吸孔等,以使患者即使为俯卧在顶板110上的状态也可以进行固定。
76.顶板驱动部120具有:与顶板110连接且使顶板110旋转而构成的第一旋转机构121、与第一旋转机构121连接的第一臂部124、与第一臂部124连接且使第一臂部124旋转而
构成的第二旋转机构122、与第二旋转机构122连接的第二臂部125、以及与第二臂部125连接且使第二臂部125旋转的第三旋转机构123。
77.第一~第三旋转机构121~123具有:接受来自在患者运送台车100装载的蓄电池(未图示)的电力使顶板110、第一臂部124、及第二臂部125移动及旋转的驱动马达(图3中的标记121a~123a)、以及算出移动量及旋转量(旋转方向)并向驱动控制部133输出的编码器(图3中的标记121b~123b)等。
78.第一臂部124与第一及第二旋转机构121、122连接,第二臂部125与第二及第三旋转机构122、123连接。第一及第二臂部124、125也可以伸缩而构成。在该情况下,第一及第二臂部124、125具有:接受来自在患者运送台车100装载的蓄电池(未图示)的电力来使第一及第二臂部124、125伸缩的驱动马达(图3中的标记124a、125a)、以及算出伸缩量并向驱动控制部133输出的编码器(图3中的标记124b、125b)等。在第一及第二臂部124、125为不伸缩的结构的情况下,不具有上述驱动马达及编码器。
79.在一个实施例中,第一旋转机构121使顶板110侧倾旋转、俯仰旋转、以及偏摆旋转而构成。第二旋转机构122使第一臂部124侧倾旋转及偏摆旋转而构成。第三旋转机构123使第二臂部125侧倾旋转及偏摆旋转而构成。另外,第一及第二臂部124、125不进行伸缩。
80.第三旋转机构123由支承部126支承,支承部126在运送部130的底座131设置的凹部138进行固定。凹部138是从底座131的表面下降的部分,优选由将支承部126整体埋入底座131内的尺寸形成。如图1(b)所示,支承部126在俯视中配置在与底座131的中心偏离的位置。由此,在高度方向(z轴)上相互重叠的顶板110、第一~第三旋转机构121~123、第一及第二臂部124、125、以及支承部126在俯视中配置在与中心偏离的位置,在底座131确保看护人员可搭乘的看护人员空间135。底座131的中心在底座131俯视为长方形的情况下是对角线的交点,在底座131俯视为圆形(或者椭圆形)的情况下为圆中心(或者短轴与长轴的交点)。看护人员空间135只要为至少一位看护人员可站立(或者可乘坐)程度的面积即可,例如可以为0.1m2以上、0.3m2以上、0.5m2以上、0.7m2以上、1m2以上、1.2m2以上、1.5m2以上、或者2m2以上。
81.如图1(a)所示,顶板110、第一~第三旋转机构121~123、以及第一及第二臂部124、125在高度方向(z轴)上重叠、在折叠的状态下可进行收纳而构成。将该状态称为患者运送台车100处于原始位置状态。即,患者运送台车100在原始位置状态下,是顶板110、第一臂部124、以及第二臂部125在高度方向(z轴)上折叠的状态。
82.再进一步说明,患者运送台车100在原始位置状态下,与顶板110的一端连接的第一旋转机构121、在顶板110的另一端之下配置的第二旋转机构122、以及与第一及第二旋转机构121、122连接的第一臂部124在高度方向(z轴)上与顶板110重叠而构成。另外,患者运送台车100在原始位置状态下,第二臂部125及第三旋转机构123在高度方向(z轴)上与第二旋转机构122及第一臂部124(以及第一旋转机构121)重叠而构成。
83.这样,当患者运送台车100处于原始位置状态时,能够抑制顶板110及顶板驱动部120在平面方向(xy平面)上扩展。患者运送台车100维持该原始位置状态,在顶板110上搭乘患者,在医院等设施内移动。
84.顶板驱动部120利用第一~第三旋转机构121~123,使顶板110、以及第一及第二臂部124、125移动及旋转(在第一及第二臂部124、125进行伸缩的情况下,上述伸缩也移动
及旋转),将顶板110移动至任意的位置。
85.如图1所示,使支承部126埋入底座131的凹部138而设置,尽量降低原始位置时顶板的高度,并且第三旋转机构123在高度方向上维持与地板面的空间,所以,第二臂部125能够在高度方向上降低顶板。例如,如图2(a)所示,顶板驱动部120能够将顶板110降下至地板面附近,由此,患者容易在顶板110上乘降。另外,如图2(b)~图2(d)所示,顶板驱动部120能够在粒子射线治疗时使顶板110移动及旋转,使患者为任意姿势地移动。
86.由第一~第三旋转机构121~123对顶板110、第一臂部124、及第二臂部125的旋转方向(侧倾旋转、俯仰旋转、和/或偏摆旋转)及旋转量在具体情况下可适当调整。在第一及第二臂部124、125为伸缩的结构的情况下,第一及第二臂部124、125的伸缩量在具体情况下也可适当调整。
87.运送部130具有:底座131、安装在底座131的多个(三个以上)车轮132、在底座131载置的驱动控制部133及运送控制部134、在底座131设置的一个或多个传感器136、以及在底座131设置的底座锁止机构137。传感器136具有空间识别传感器与障碍物传感器。空间识别传感器例如为2d、3d激光测距仪(3d激光定位器(lidar))等,为了推定患者运送台车100的位置,对周围的环境进行识别,例如生成三维点云数据(空间信息)。通过将来自空间识别传感器的空间信息与已知的地图信息进行对比,能够推定患者运送台车100的位置,生成位置信息。传感器136设置在患者运送台车100移动时可进行空间识别、且可检测障碍物的位置(前后、四角等),底座锁止机构137设置在底座131的地板面侧、或者前后左右的任意一个以上的侧面。患者运送台车100在由后面叙述的综合控制装置260指示的路径中移动期间,由传感器136获取包括该路径的空间的信息,通过将该空间的信息与在患者运送台车100中预先存储的已知的地图信息进行对比,算出自己(患者运送台车100)的位置信息,并将该算出的位置信息向所述综合控制装置发送。由此,综合控制装置260能够掌握患者运送台车100的位置。
88.患者运送台车100利用公知的技术在设施内自行行驶。优选是具有自我位置推定功能与行驶控制功能的自主移动式,但也可以为磁感应式、电磁感应式、或二维码等图像识别方式、或者激光引导式。另外,可以是追随看护人员等、或协调移动的追随式,也可以是根据状况切换行驶模式的组合。
89.车轮132是可在全向上移动的驱动车轮(全向驱动车轮),优选是麦克纳姆轮或全向轮。车轮132通过运送控制部134的控制,接受车轮用驱动马达(未图示)的力来旋转,使患者运送台车100行驶。虽然患者运送台车100自行行驶,但也可以看护人员等手动来移动。
90.患者运送台车100也可以为了在行驶时由搭乘在看护人员空间135的看护人员手动行驶而具有操作面板(未图示)和作为安全功能的紧急停止按钮(未图示),在紧急情况时使患者运送台车100紧急停止。也可以在患者运送台车100设有与驱动控制部133通过有线或无线通信的悬挂装置(遥控器),使看护人员等能够自该悬挂装置指示顶板驱动部120的移动。例如可以在患者病情骤变时等,在设施内的任意地方使患者从顶板110上下,也可以从看护人员空间135上下。另外,也可以在底座131设置清除小障碍物的除障器(未图示),以在患者运送台车100移动期间,例如不会使地板上小的障碍物卷入车轮132。另外,也可以在患者运送台车100行驶时作为安全功能而具有发光单元和音频单元(均未图示)。发光单元由led灯等构成,以光的颜色和闪烁的方式进行显示,以能够容易地识别患者运送台车100
的当前状态(行驶中/待机中/减速停止中/异常状态等)。另外,也可以具有信号灯功能。音频单元通过旋律和音频向周围通报行进方向和方向指示。
91.驱动控制部133是具有与后面叙述的粒子射线照射系统200的管理装置(后面叙述的定位室管理装置240及治疗室管理装置250)进行无线通信的天线等接口、用于基于来自上述管理装置的指示(控制信号)来控制顶板驱动部120的程序及处理器(或者asic等)、以及存储程序和各种信息的存储器等的计算机。驱动控制部133根据从上述管理装置通过无线通信而接收到的指示,对第一~第三旋转机构121~123、以及第一及第二臂部124、125的驱动进行控制,控制顶板110的移动、旋转及倾斜。
92.图3是驱动控制部133的功能块图。驱动控制部133作为在存储器中存储的程序及处理器协作等而实现的功能部,具有:与上述管理装置接收/发送信息的接收/发送部133a、以及分别控制第一~第三旋转机构121~123的第一旋转机构控制部133b、第二旋转机构控制部133c及第三旋转机构控制部133d。
93.第一旋转机构控制部133b基于从上述管理装置接收到的指示,控制第一旋转机构121的驱动马达121a,并控制顶板110的旋转(侧倾旋转、俯仰旋转、和/或偏摆旋转)。旋转量(侧倾旋转的旋转量、俯仰旋转的旋转量、和/或偏摆旋转的旋转量)由编码器121b算出,并向第一旋转机构控制部133b输出。第一旋转机构控制部133b经由接收/发送部133a,将旋转量的信息向上述管理装置发送。上述管理装置基于该信息,掌握第一旋转机构121的旋转量。
94.第二旋转机构控制部133c基于从上述管理装置接收到的指示,控制第二旋转机构122的驱动马达122,并控制第一臂部124的旋转(侧倾旋转、俯仰旋转、和/或偏摆旋转)。旋转量(侧倾旋转的旋转量、俯仰旋转的旋转量、和/或偏摆旋转的旋转量)由编码器122b算出,并向第二旋转机构控制部133c输出。第二旋转机构控制部133c经由接收/发送部133a,将旋转量的信息向上述管理装置发送。上述管理装置基于该信息,掌握第二旋转机构122的旋转量。
95.同样地,第三旋转机构控制部133d基于从上述管理装置接收到的指示,控制第三旋转机构123的驱动马达123a,并控制第二臂部125的旋转(侧倾旋转、俯仰旋转、和/或偏摆旋转)。旋转量(侧倾旋转的旋转量、俯仰旋转的旋转量、和/或偏摆旋转的旋转量)由编码器123b算出,并向第三旋转机构控制部133d输出。第三旋转机构控制部133d经由接收/发送部133a,将旋转量的信息向上述管理装置发送。上述管理装置基于该信息,掌握第三旋转机构123的旋转量。
96.在第一及第二臂部124、125为可伸缩的结构的情况下,驱动控制部133还具有第一臂部控制部133e及第二臂部的控制部133f。第一臂部控制部133e基于从上述管理装置接收到的指示,控制第一臂部124的驱动马达124a,并控制第一臂部124的伸缩。伸缩量由编码器124b算出,并向第一臂部控制部133e输出。第一臂部控制部133e经由接收/发送部133a,将伸缩量的信息向上述管理装置发送。上述管理装置基于该信息,掌握第一臂部124的伸缩量。针对第二臂部控制部133f也是相同的,省略说明。
97.运送控制部134是具有与后面叙述的粒子射线照射系统200的管理装置(后面叙述的定位室管理装置240、治疗室管理装置250、以及综合控制装置260)进行无线通信的天线等接口、用于基于来自上述管理装置的指示来控制运送部130的程序及处理器(或者asic
等)、以及存储程序和各种信息的存储器等的计算机。
98.图4是运送控制部134的功能块图。运送控制部134作为在存储器中存储的程序及处理器协作等而实现的功能部,具有:与上述管理装置接收/发送信号的接收/发送部134a、控制车轮132的车轮控制部134b、以及控制底座锁止机构137的底座锁止机构控制部134c。
99.车轮控制部134b基于从上述管理装置接收到的指示,控制驱动马达132a,并控制车轮132的旋转及方向。依照来自上述管理装置的指示,运送控制部134控制车轮132,使患者运送台车100在设施内自行行驶。车轮132的旋转量(速度及移动距离等)由编码器132b算出,并向车轮控制部134b输出。车轮控制部134b经由接收/发送部134a,将旋转量的信息向上述管理装置发送。
100.底座锁止机构控制部134c基于从上述管理装置接收到的指示,控制驱动马达137a,并控制底座锁止机构137的锁止状态(从底座131突出而与锁止接受部卡合)或者锁止解除状态(解除与锁止接受部的卡合,收纳在底座131)。
101.包含在传感器136中的障碍物传感器为非接触式,对距离患者运送台车100规定范围(例如数cm~数m)内的周围的障碍物进行检测,例如是二维或三维光学传感器、激光测量传感器、声响传感器、磁场传感器、电场传感器、感应传感器、电波传感器、或者上述传感器的组合。当传感器136检测到障碍物时,向运送控制部134及后面叙述的综合控制装置发送检测信号,接收上述信号后,运送控制部134及综合控制装置260进行控制,使患者运送台车100停止或者避开障碍物。需要说明的是,作为检出障碍物的传感器,也可以具有接触式传感器,其配置在底座131和顶板110等在平面方向(xy平面)上可最大扩展的部分的周围,当与障碍物接触时,则运送控制部使患者运送台车100减速停止。
102.底座锁止机构137是用于与在粒子射线治疗室及定位室的地板和墙壁等设置的锁止接受部(图6中的225、图7中的235)机械性卡合(锁止状态)、使患者运送台车100不会相对于地板运动地进行固定的机构。也可以替代或除了机械性卡合的机构以外,底座锁止机构137与锁止接受部使用利用空气压力的气压夹具或磁力进行固定。利用底座锁止机构137、以及在粒子射线治疗室及定位室的地板和墙壁等设置的锁止接受部,将患者运送台车100固定在房间,即使在相对于底座131使顶板驱动部移动至非对称位置的情况下,也能够维持所希望的患者的姿势并使之静止。需要说明的是,底座锁止机构137与锁止接受部卡合的机构也可以不设置在底座锁止机构137侧,而设置在锁止接受部侧。
103.底座锁止机构137也可以构成为,在未与锁止接受部卡合的状态(锁止解除状态)下收纳在底座131内,以在患者运送台车100的移动时不会成为障碍,在与设置于粒子射线治疗室等的锁止接受部卡合时从底座131突出,与锁止接受部卡合。需要说明的是,在锁止接受部设置在粒子射线治疗室等的壁面等的情况下,与其配合,底座锁止机构137也设置在底座131的侧面等。
104.需要说明的是,作为底座锁止机构137的变形例,底座锁止机构也可以不配备在患者运送台车100,而收纳在粒子射线治疗室等的墙壁和地板。在该情况下,底座锁止机构也可以构成为,在与配置于底座131的锁止接受部未卡合的状态(锁止解除状态)下,收纳在粒子射线治疗室等的墙壁和地板中,以在患者运送台车100移动时不会成为障碍,而在与锁止接受部卡合时,底座锁止机构从墙壁和地板突出,与锁止接受部卡合。另外,也可以在底座锁止机构设置xyz平台,以能够选择固定的位置。由此,患者运送台车100与底座锁止机构的
卡合位置不固定,能够形成在希望的位置上。另外,利用在底座锁止机构配备的位移传感器(未图示),对患者运送台车100与底座锁止机构之间的距离进行测量,根据其接近量,运送控制部134使运送部130的车轮132工作,以引导至与锁止接受部的固定位置。该位移传感器是对在患者运送台车100与在固定位置设置的底座锁止机构接触时受到的力或由于接近而引起的场的变化等进行检测的传感器,例如是接触式传感器、光学传感器、涡流传感器、或上述传感器的组合。
105.在患者运送台车100装载的蓄电池可以通过配置在底座锁止机构137等的汽车连接器(未图示)进行充电。
106.如上所述,本实施方式的患者运送台车100的特征在于主要具有如下的结构。患者运送台车100具有:搭乘患者的顶板110、使顶板110向任意的位置移动及旋转的顶板驱动部120、以及使患者运送台车100移动的运送部130。
107.顶板驱动部120利用第一~第三旋转机构121~123使第一及第二臂部124、125移动及旋转(在第一及第二臂部124、125能够伸缩的情况下,也使它们伸缩),使顶板110移动至任意的位置。由此,例如顶板驱动部120能够使顶板110移动至地板面附近,使患者容易上/下顶板110。
108.患者运送台车100在原始位置状态下,第一~第三旋转机构121~123、以及第一及第二臂部124、125在高度方向(z轴)上与顶板110重叠而构成,以使顶板110、第一臂部124、及第二臂部125在高度方向(z轴)上为折叠的状态。由此,能够抑制顶板110及顶板驱动部120在平面方向(xy平面)上的扩展,在患者运送台车100移动时不会成为障碍。另外,因为支承部126埋入底座131的凹部138而设置,所以能够尽量降低原始位置时顶板的高度,在患者上/下时能够使顶板110尽量下降至地板面附近,使患者容易上/下。
109.另外,支承第三旋转机构123的支承部126在俯视中固定在与底座131的中心偏离的位置,由此,在底座131确保看护人员可搭乘的看护人员空间135。
110.〔粒子射线照射系统〕
111.针对使用本实施方式的患者运送台车100的粒子射线照射系统200进行说明。粒子射线照射系统200包括:一辆或者多辆患者运送台车100、以及粒子射线照射装置210、患者位置设定装置220、230、定位室管理装置240、治疗室管理装置250、及综合控制装置260。
112.图5是在进行粒子射线治疗的设施(例如医院)设置的粒子射线照射系统200的例子。在进行粒子射线治疗的设施中至少包括:向患者照射粒子射线的粒子射线照射装置210所放置的一个或者多个粒子射线治疗室、以及进行使患者的患部位置与粒子射线照射装置210的照射位置(等中心ic)一致的定位处理的一个或者多个定位室。
113.粒子射线照射装置210包括:生成粒子射线的加速器211、包括在内部通过粒子射线的真空管及调整粒子射线的方向、强度、以及尺寸等的各种电磁体装置的粒子射线引导器212、将粒子射线向患者的应该照射的部位射出的照射喷嘴213、以及控制粒子射线照射装置210整体的照射控制部214。
114.加速器211是生成质子射线、中子射线、或者重粒子射线即粒子射线的装置,例如是同步加速器、回旋加速器、同步回旋加速器、或者直线加速器。由加速器211生成的粒子射线由粒子射线引导器212被引导至照射喷嘴213。粒子射线引导器212的各种电磁体装置包括(日本)专利第6364141号、(日本)专利第6387476号、以及(日本)专利6734610号所述的四
极电磁体装置、转向电磁体装置、分配电磁体装置、会聚电磁体装置、和/或超导电磁体装置等。另外,粒子射线引导器212的各种电磁体装置此外也可以包括:对粒子射线的形状和/或剂量进行调整的射线缝(
ビームスリット
)装置、以及用于对粒子射线的射线位置进行微调的转向电磁体装置。上述(日本)专利第6364141号、(日本)专利第6387476号、以及(日本)专利6734610号所述的内容通过引用而包含在本发明中。
115.照射喷嘴213设置在粒子射线治疗室内,将来自粒子射线引导器212的粒子射线向患部射出。照射喷嘴213具有:扫描电磁体213a、射线监测器213b、以及能量调制部件213c(图7)。照射喷嘴213例如为(日本)专利第6387476号所述的照射喷嘴。
116.扫描电磁体213a是用于通过调整流动的电流量和电流的方向,对从照射喷嘴213射出的粒子射线的行进方向进行微调,并在规定的范围内可扫描(scan)的电磁体。射线监测器213b是对粒子射线进行监视、并对剂量、射线位置及平坦度进行测量的监测器。测量到的信息从射线监测器213b向粒子射线照射装置210的照射控制部214反馈,应用在扫描电磁体213a的控制和粒子射线的高精度的照射中。能量调制部件213c对粒子射线的能量进行调整,从而调整粒子射线到达患者体内的深度,例如为射程调制器、散射器、脊形过滤器、患者准直器、患者丸剂、或者涂药器等。
117.照射控制部214是与粒子射线治疗室的治疗室管理装置250通信,从治疗室管理装置250接受粒子射线照射装置210的指示,并基于该指示对粒子射线照射装置210的加速器211、粒子射线引导器212、以及照射喷嘴213进行控制的计算机。
118.在定位室配备有患者位置设定装置220、以及与患者运送台车100的底座锁止机构137卡合的锁止接受部225(图6)。搭乘有患者的患者运送台车100在设施内通过,并向定位室内运送,在使底座锁止机构137与在定位室设置的锁止接受部225卡合并固定后,仍然作为定位用测量台加以利用。不需要从运送患者的台车向定位用测量台转移,减轻患者的负担。另外,在定位室内不需要配备固定的测量台,有助于缩小定位室的空间。
119.在图6的结构中,虽然锁止接受部225形成在地板面,但在底座锁止机构137设置在底座131的侧面(或者其它的部位)等不同的部分的情况下,设置在与之对应的位置。另外,在患者运送台车100设有多个底座锁止机构137的情况下,在定位室内配备与其数量对应数量的的锁止接受部225。
120.患者位置设定装置220具有:多个x射线管221(图中为221a、221b)、以及检出ccd区域图像传感器,cmos区域图像传感器,或者平板探测器等的x射线的多个检出器222(图中为222a、222b)。患者位置设定装置220例如是x射线拍摄装置或者x射线ct装置。作为患者位置设定装置220,可以使用mri装置,在该情况下,替代x射线管221,使用磁场发生装置(电磁体等),作为检出器222,使用磁场检出装置(rf接收线圈等)。
121.图6中绘制有两组与x射线管221a、221b对应的检出器222a、222b,但可以为一组,也可以为三组以上。数量越多,精度越高,但处理变得繁琐,所以,优选两组~四组。
122.在定位室,使用患者位置设定装置220,进行患部相对于粒子射线的照射位置(等中心ic)的定位(图6(a))。等中心坐标数据(xyz坐标)及x射线图像数据、以及顶板驱动部120的第一~第三旋转机构121~123及第一及第二臂部124、125的定位数据(即,用于在粒子射线治疗室中再现定位时采取的顶板110及顶板驱动部120的姿势的各种数据)被发送给定位室管理装置240,并经由网络270,从定位室管理装置240向治疗室管理装置250发送。在
定位室中粒子射线照射位置的定位完成后,患者运送台车100返回处于患者仍然搭乘在顶板110的原始位置的状态(图6(b)),直接向粒子射线治疗室移动。
123.粒子射线治疗室为了防止不必要的放射线向外部泄漏而由厚混凝土等掩体包围周围(图5)。粒子射线治疗室的入口为具有转角的迷路结构,采取了防止粒子射线泄漏的措施。
124.粒子射线治疗室配备有粒子射线照射装置210(特别是照射喷嘴213)、进行粒子射线照射位置的定位的患者位置设定装置230、以及与患者运送台车100的底座锁止机构137卡合德锁止接受部235(图7)。患者搭乘的患者运送台车100在设施内通过,向粒子射线治疗室内运送,在使底座锁止机构137与在粒子射线治疗室设置的锁止接受部235卡合并固定后,仍然作为粒子射线治疗的治疗台而加以利用。不需要从运送患者的台车向患者治疗用的治疗台转移,减轻患者的负担。另外,在粒子射线治疗室内不需要配备固定的治疗台,能够缩小粒子射线治疗室的空间。
125.在图7中,锁止接受部235形成在地板面,但在底座锁止机构137设置在底座131的侧面(或者其它的部位)的情况下,配置在与之对应的位置。另外,在具有多个底座锁止机构137的情况下,在粒子射线治疗室内配备有与其数量对应数量的锁止接受部235。
126.在粒子射线治疗室中,基于从定位室管理装置240接收到的定位数据,再次进行患部相对于粒子射线的照射位置的定位处理。需要说明的是,在粒子射线治疗室配备的患者位置设定装置230也可以为与在定位室配备的患者位置设定装置220不同的结构,但通过形成为相同的结构,容易进行粒子射线治疗室中的定位与定位室中的定位之间的位置配合,因而优选之。
127.定位室的患者位置设定装置220也可以一部分设置在定位室内,剩余的部分设置在定位室外。同样地,粒子射线治疗室的患者位置设定装置230也可以一部分设置在粒子射线治疗室内,剩余的部分设置在粒子射线治疗室外。因此,只要患者位置设定装置220、230的一部分设置在定位室或者粒子射线治疗室内时,则称为“在定位室设置的患者位置设定装置”及“在粒子射线治疗室设置的患者位置设定装置”。
128.患者位置设定装置220具有:各种通信接口、用于各种控制的程序及处理器(或者asic等)、以及进行定位处理时计算位移量和读取获取图像的存储器等。患者位置设定装置220作为在存储器中存储的程序及处理器协作等而实现的患者位置设定装置220的功能部,而具有x射线拍摄控制部(未图示)。
129.x射线拍摄控制部根据来自定位室管理装置240的指示或者在规定的周期内,控制x射线管221及检出器222,生成患者的患部的x射线图像,并向患者位置设定部输出。患者位置设定部将输入的x射线图像与预先存储的该患者的患部的基准x射线图像进行比较,算出双方的误差量(位置误差),将该信息向定位室管理装置240输出。另外,由在底座锁止机构137配置的位移传感器进行检测的、底座锁止机构与底座131(即患者运送台车100)之间的接近量也可以作为对患者运送台车100的固定位置的校正量而向定位室管理装置240发送,在位置误差中增加校正量来更新位置误差。
130.定位室管理装置240为了减少上述位置误差(或者为0),算出患者运送台车100的顶板110及顶板驱动部120的移动量和/或旋转量,并将该信息向患者运送台车100的驱动控制部133发送。接收该信息后,驱动控制部133启动顶板驱动部120,调整顶板110的位置。另
外,定位室管理装置240从患者运送台车100接受实际上移动的移动量和/或旋转量的信息。
131.定位室管理装置240经由网络270,向治疗室管理装置250发送各种信息。各种信息包括定位室管理装置240从驱动控制部133接收到的移动量和/或旋转量的信息。另外,在患者运送台车100和底座锁止机构137发生问题的情况下,从患者运送台车100向定位室管理装置240发送出错信号。接受到出错信号的定位室管理装置240进行工作,在患者位置设定装置220的显示界面等显示警告以重新进行定位处理,或向操作者进行出错显示,督促以确保患者安全等。
132.关于粒子射线治疗室的患者位置设定装置230及治疗室管理装置250,也与定位室的患者位置设定装置220及定位室管理装置240相同,从而省略说明。特别是治疗室管理装置250在粒子射线治疗(照射)期间,从患者运送台车100的顶板驱动部120和/或运送部130接收因移动和误操作等而产生的出错信号时,向粒子射线照射装置210发送信号,进行紧急行动,使粒子射线照射装置210停止粒子射线的照射。
133.综合控制装置260是对患者运送台车100的行驶进行管理的计算机。综合控制装置260与患者运送台车100的驱动控制部133及运送控制部134通信,对其进行控制,并且交换各种信息。另外,综合控制部260与定位室管理装置240及治疗室管理装置250通信,交换各种信息(图8)。
134.综合控制装置260是具有接口、用于控制粒子射线照射系统200整体的程序及处理器(或者asic等)、以及存储程序和各种信息的存储器等的计算机。综合控制装置260作为在存储器中存储的程序及处理器协作等而实现的功能部,而具有用于控制患者运送台车100的移动的路径生成部261及交通管制部262。
135.为了提高粒子射线治疗的效率,要求缩短每位患者占用治疗室的时间、以及在患者的粒子射线治疗结束后下一位患者立即进入粒子射线治疗室。有时具有多辆患者运送台车在粒子射线治疗室和粒子射线治疗室外的设施内运行,多辆患者运送台车的运行需要掌握各辆患者运送台车状况的管理装置。鉴于上述问题,综合控制装置260对在设施内患者运送台车100的移动进行管理。
136.路径生成部261具有生成粒子射线治疗设施内的地图、并进行存储的功能。路径生成部261在将粒子射线治疗设施内的一个或者多个粒子射线治疗室及一个或者多个定位室分别作为起点、终点的情况下,生成连结起点及终点的多条路径。在此,通常在粒子射线治疗设施内,为了使患者之间不会照面、以及确保医疗从业人员的动线,即使具有相同起点与终点之间的路径,也会存在多条路径。
137.路径生成部261在生成起点及终点间的路径的过程中,利用公知的技术,预先绘制设施内的结构。路径生成部261优选利用nfn方式(natural feature navigation:自然特征导航)进行绘制。由路径生成部261生成的多条路径与交通管制部262共用。
138.交通管制部262从路径生成部261生成的多条移动路径中选择最佳路径,指示患者运送台车100的运送控制部134在已选择的路径移动。运送控制部134依照来自交通管制部262的指示,使运送部130工作,使患者运送台车100沿选择的路径移动。
139.在多台患者运送台车100在设施内行驶的情况下,可能会在通路上发生拥堵。在某第一患者运送台车100以粒子射线治疗室a为起点、另一第二患者运送台车100以粒子射线治疗室a为终点的情况下,当以治疗室a为起点的第一患者运送台车100未从治疗室a退出
时,第二患者运送台车100必须待机,使设施整体的治疗效率降低。因此,交通管制部262在恒定的周期内(例如1秒钟的周期)获取各患者运送台车100的位置信息,时时选择最佳的路径。
140.例如,在图9中,表示存在路径生成部261生成的、从第一定位室(起点)向第一粒子射线治疗室(终点)的三条路径r1~r3,并存在从第二定位室(起点)向粒子射线治疗室3(终点)的三条路径r4~r6的情况。
141.例如,在某患者运送台车100在第一定位室完成定位后、去往第一粒子射线治疗室的情况下,在路径r1~r3的任意一条路径上移动。此时,交通管制部262在判断存在从第一粒子射线治疗室1返回准备室的另一患者运送台车100的情况下(图9中的虚线),为了避免两辆患者运送台车碰撞和拥堵,将从定位室1出来的患者运送台车100的路径指定为r1或者r2,并发送指示。
142.例如,在某患者运送台车100在第二定位室完成定位后、去往第三粒子射线治疗室的情况下,在路径r4~r6的任意一条路径上移动。此时,当判断从第三粒子射线治疗室返回准备室的另一患者运送台车100延迟而需要少许时间时,为了避免两辆患者运送台车发生碰撞和拥堵,交通管制部262指定绕远的路径r5作为从第二定位室出来的患者运送台车100的路径,而不是最短路径r4。另外,在患者运送台车100于路径r5上移动期间,当患者运送台车100的传感器136检测到意料之外的障碍物时,将检测信号向综合控制装置260发送。在接收该信号、交通管制部262判断在路径r5不能通行的情况下,交通管制部262考虑移动期间其它的患者运送台车100的位置,向患者运送台车100发送指示,将路径从r5切换为路径r6或者r4。
143.例如,在某患者运送台车100在第二定位室完成定位后、去往第三粒子射线治疗室的情况下,假设综合控制装置260在第三粒子射线治疗室未从治疗室管理装置接收到将其它的患者运送台车100的运送控制部134从待机状态(standby状态)恢复的指示。此时,综合控制装置260判断在第三治疗室中尚未完成治疗,通过与放射线治疗的计划管理装置(未图示)通信,将该患者分配到任一空闲的治疗室,由此而重新生成治疗计划。例如当分配到第二治疗室时,综合控制装置260将从第二定位室出来的患者运送台车100的路径指定为r7,并发送指示。放射线治疗的计划管理装置例如为(日本)专利6632015号所述的装置。
144.当由在患者运送台车100配置的传感器136检测到未被路径生成部261掌握的障碍物时,患者运送台车100被控制,以进行避开障碍物的行动(包括行驶的停止)。未被路径生成部261掌握的障碍物例如是在通路中步行的医疗从业人员和患者、以及临时放置在通路中的货物等。当由传感器136检测出障碍物时,检测信号被发送给交通管制部262,根据来自交通管制部262的指示,运送控制部134使运送部130的车轮132工作,以避开障碍物。在患者运送台车100彼此错车的情况下也是相同的,各自的传感器136相互检测为障碍物,检测信号被发送给交通管制部262。交通管制部262向各自的运送控制部134指示患者运送台车100各自应该如何避开,以不妨碍各自的行驶。
145.接着,针对在进入定位室及粒子射线治疗室时,患者运送台车100的控制切换进行说明。
146.当患者运送台车100进入定位室、底座锁止机构137与锁止接受部225完成卡合时(锁止状态),将表示已为锁止状态的信号向定位室管理装置240发送。在接受该信号后,定
位室管理装置240为了防止患者运送台车100意外运动而指示运送控制部134为待机状态(standby状态)时,发送将驱动控制部133从待机状态恢复的指示。
147.在定位完成后,定位室管理装置240向驱动控制部133发送完成定位的信号,驱动控制部133接受该信号后,使顶板110返回为原始位置状态。在返回为原始位置状态后,驱动控制部133将表示已返回为原始位置状态的信号向定位室管理装置240发送。接受该信号后,定位室管理装置240向运送控制部134发送指示,当接收到来自定位室管理装置240的指示时,运送控制部134从待机状态恢复,使驱动控制部133成为待机状态。然后,运送控制部134使底座锁止机构137成为锁止解除状态,并将表示已为锁止解除状态的信号向定位室管理装置240发送。接受该信号后,定位室管理装置240向运送控制部134发送允许患者运送台车100移动的指示(包括路径的指定)。接受该指示后,运送控制部134使患者运送台车100移动,从定位室退出,向粒子射线治疗室移动。
148.同样地,当患者运送台车100进入粒子射线治疗室、底座锁止机构137与锁止接受部235的卡合完成时,将表示已为锁止状态的信号向治疗室管理装置250发送。接受该信号后,治疗室管理装置250在为了防止患者运送台车100意外运动而指示运送控制部134为待机状态时,发送使驱动控制部133从待机状态恢复的指示。
149.在粒子射线治疗完成后,治疗室管理装置250向驱动控制部133发送向驱动部120的原始位置复位的信号,驱动控制部133接受该信号后,使顶板110返回为原始位置状态。在返回为原始位置状态后,驱动控制部133将表示已返回为原始位置状态的信号向治疗室管理装置250发送。接受该信号后,治疗室管理装置250向运送控制部134发送指示,当接收到来自治疗室管理装置250的指示时,运送控制部134从待机状态恢复,驱动控制部133成为待机状态。然后,运送控制部134使底座锁止机构137成为锁止解除状态,将表示已为锁止解除状态的信号向治疗室管理装置250发送。接受该信号后,治疗室管理装置250向运送控制部134发送允许患者运送台车100移动的指示(包括路径的指定)。接受该指示后,运送控制部134使患者运送台车100移动,从粒子射线治疗室退出。
150.图10是说明粒子射线照射系统200的粒子射线治疗的一系列流程的流程图。需要说明的是,该流程图的步骤顺序不限于此,可以根据需要适当调整。
151.在粒子射线治疗时,进入设施的患者在准备室等中搭乘患者运送台车100,由固定件不能行动地固定在顶板110。在患者搭乘顶板110时,驱动控制部133启动顶板驱动部120,使顶板110向地板面附近移动,使患者容易搭乘(图2(a))。搭乘有患者的顶板110返回为原始位置状态,做好患者运送台车100的移动准备。
152.表示已完成移动准备的信号被从运送控制部134向综合控制装置260发送,综合控制装置260的交通管制部262向患者运送台车100的运送控制部134发送指示(包括路径的指定)。接受该指示后,驱动控制部133成为待机状态,运送控制部134沿指定的路径,使患者运送台车100向指定的定位室移动(步骤s1)。
153.在定位室内运送控制部134使底座锁止机构137成为锁止状态,并将表示已完成锁止的信号向定位室管理装置240发送(步骤s2)。接受该信号后,定位室管理装置240发送使运送控制部134为待机状态的指示、以及使驱动控制部133从待机状态恢复的指示(步骤s3)。驱动控制部133启动顶板110及顶板驱动部120,进行粒子射线的照射位置的定位(步骤s4)。定位数据经由网络270,从定位室管理装置240向治疗室管理装置250发送。
154.当定位完成时,定位室管理装置240向驱动控制部133发送向驱动部120的原始位置复位的信号,接受该信号后,驱动控制部133使顶板110返回为原始位置状态。之后,驱动控制部133将表示已返回为原始位置状态的信号向定位室管理装置240发送,定位室管理装置240发送将运送控制部134从待机状态恢复的指示、以及使驱动控制部133成为待机状态的指示。接受该指示后,驱动控制部133成为待机状态,运送控制部134从待机状态恢复(步骤s5)。运送控制部134使底座锁止机构137成为锁止解除状态(步骤s6)。
155.运送控制部134将表示已为锁止解除状态的信号向定位室管理装置240发送,接受该信号的定位室管理装置240向综合控制装置260发送也可以使患者运送台车100移动的允许指示。接受该指示后,运送控制部134沿由综合控制装置260指定的路径,使患者运送台车100向粒子射线治疗室移动(步骤s7)。
156.在粒子射线治疗室内,运送控制部134使底座锁止机构137成为锁止状态,将表示已为锁止状态的信号向治疗室管理装置250发送(步骤s8)。接受该信号后,治疗室管理装置250发送使运送控制部134成为待机状态的指示、以及将驱动控制部133从待机状态恢复的指示。接受该指示后,运送控制部134成为待机状态,驱动控制部133从待机状态恢复,能够控制顶板110及顶板驱动部120(步骤s9)。驱动控制部133从治疗室管理装置250接收由定位室确定的粒子射线的照射位置的信息(包括顶板110及顶板驱动部120的姿势信息),基于该信息,再现患者位置(步骤s10)。之后,也可以在需要时,由粒子射线治疗室的患者位置设定装置230进一步进行定位处理(步骤s11)。
157.当定位完成时,综合控制装置260使粒子射线照射装置210工作,开始粒子射线治疗(步骤s12)。
158.当粒子射线治疗结束时,治疗室管理装置250向驱动控制部133发送表示患者定位已完成的信号,驱动控制部133接受该信号后,使顶板110返回为原始位置状态。治疗室管理装置250发送使运送控制部134从待机状态恢复的指示、以及使驱动控制部133成为待机状态的指示。接受该指示后,驱动控制部133成为待机状态,运送控制部134从待机状态恢复(步骤s13)。然后,运送驱动部134使底座锁止机构137成为锁止解除状态(步骤s14)。运送控制部134将表示已为锁止解除状态的信号向治疗室管理装置250发送,接受了该信号的治疗室管理装置250向运送控制部134发送也可以使患者运送台车100移动的允许指示。接受该指示后,运送控制部134使患者运送台车100移动,从粒子射线治疗室退出,向准备室等移动(步骤s15)。
159.在上述实施方式中说明的尺寸、材料、形状、结构主要部件的相对位置等是任意的,可根据应用本发明的装置的结构或各种条件进行变更,这一点本领域的技术人员是可以理解的。另外,本发明不限于具体说明的上述实施方式。
160.附图标记说明
161.100患者运送台车;110顶板;120顶板驱动部;121第一旋转机构;122第二旋转机构;123第三旋转机构;124第一臂部;125第二臂部;126支承部;130运送部;131底座;132车轮;133驱动控制部;134运送控制部;135看护人员空间;136传感器;137底座锁止机构;138凹部;200粒子射线照射系统;210粒子射线照射装置;220,230患者位置设定装置;240定位室管理装置;250治疗室管理装置;260综合控制装置;270网络。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1