一种智能医疗保健按摩设备的制作方法
1.本发明涉及医疗保健领域,具体涉及一种智能医疗保健按摩设备。
背景技术:
2.按摩可分为医疗按摩和保健按摩,其中医疗按摩又称推拿疗法、伤科按摩,是以中医的脏腑、经络学说为理论基础,并结合西医的解剖和病理诊断,运用推拿手法作用于人体特定的部位和穴位,以达到防病治病目的的一种治疗方法,也是人类最古老的一种外治疗法;保健按摩属于保健医学的一个分支,主要是解除人体的疲劳,包括精神疲劳和身体疲劳,让患者从心理和身体上得到充分放松;按摩也有利于循环系统和新陈代谢,对于一般慢性病或身体过度虚弱的患者,是非常安全可靠的。
3.在实际操作中,按摩必须由具有专业知识和经验的医师进行一对一操作,通过按、摩、推、拿等手法作用于患者的身体上,长时间操作后医师的双手极易产生疲累,导致按摩效率降低,按摩质量变差;因此,研制一种智能医疗保健按摩设备来代替专业医师在按摩过程中的作用,不仅可以降低患者的治疗成本,提高按摩效率,还能减轻医务人员的工作压力,具有明显的经济效益和社会效益。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一中成本低、智能化程度高、效果好的医疗保健按摩设备。
5.本发明采取的技术方案为:一种智能医疗保健按摩设备,包括床、竖移机构、转盘机构、并联机构、执行机构。
6.作为优选,床上侧设有床板,床板前端设有让位孔和头枕可供患者仰卧和俯卧,立柱安装于床右侧并构成移动副,纵移电机安装于立柱下端并可驱动立柱的纵向移动。
7.作为优选,竖移机构中的第二齿条安装于立柱上端,横臂与立柱构成移动副,电机架与横臂紧固连接,蜗杆与电机架转动连接,并与第二齿条构成蜗杆齿条传动,竖移电机与电机架紧固连接并通过同步带驱动蜗杆的转动,从而实现横臂的升降和定位。
8.作为优选,转盘机构中设置有五个卡位,分别对应放置筋膜枪、按摩杆、经络刷、按摩叉和按摩轮,五个按摩头可根据需要进行自动选择和更换。
9.作为优选,并联机构由横臂、第一支臂、第二支臂、第三支臂、移动板构成,其中横臂是静平台,移动板是动平台,第一电机可驱动第一支臂的伸缩,第二电机可驱动第二支臂的伸缩,第三电机可驱动第三支臂的伸缩,第四电机可驱动第三支臂的摆动,从而使并联机构具有四个自由度。
10.作为优选,执行机构中的执行板通过导向柱与移动板连接,两者之间设置有压力传感器,执行板前端设置有摄像头,执行板通过莫氏锥面结构与按摩头进行定位连接,第五电机与执行板固定连接,按摩头又可通过花键结构与第五电机连接。
11.作为优选,按摩设备可由上位机进行控制,将患者病情参数输入上位机后,上位机
可自动制定适合患者的按摩方案,并记录患者的按摩情况。
12.作为优选,压力传感器的数量为三个,并且成三角形布置。
13.作为优选,压力传感器可实时监测按摩头对患者的压力,不仅能获得较好的按摩效果,也能防止按摩头压力过大而对患者造成伤害。
14.作为优选,摄像头可采集患者身体图像信息并进行视觉定位,经上位机处理后可得到患者各穴道的空间位置。
15.作为优选,第五电机的输出轴上设置有外花键,外花键每个齿的下端两侧均设置为75
°
的夹角。
16.作为优选,筋膜枪在第五电机的驱动下,可通过棘轮盘结构实现对患者身体的高频冲击,实现对软组织的按摩。
17.作为优选,第五电机可根据按摩需要实时改变按摩杆、经络刷、按摩叉、按摩轮的方向。
18.本发明的有益效果:
①
患者可由按摩设备进行自动对症按摩,不再需要专业医师进行一对一的操作,节省了医务资源,降低了患者的按摩成本,提高了按摩效率;
②
并联机构具有四个自由度,第五电机又可驱动按摩头的转动,从而按摩头具有五个自由度,丰富的自由度可使按摩头具有极高的灵活度,进而可使按摩设备能够获得很好的效果;
③
五中按摩头可针对不同按摩类型进行自动选择和切换,丰富的按摩头种类也使按摩设备具有广泛的应用性;
④
摄像头可采集患者体型数据,经由上位机处理后可得到患者穴位的空间坐标,进而根据穴位经络对患者进行对应按摩,智能化程度高;
⑤
执行板与移动板之间设置有压力传感器,可实时监测按摩头对皮肤的压力,从而可根据需要实时调整按摩压力,进而取得较好的按摩效果,同时也能防止压力过大对患者造成伤害;
⑥
横臂的上下运动由蜗杆齿条结构进行传动,蜗杆齿条结构具有传动比大、传动稳定和位置自锁的特点,不仅结构紧凑还能使横臂在任意位置悬停,不会自发向下溜车,具有较高的安全性和可靠性;
⑦
立柱设置于床一侧,可为患者上下床提供较大空间,可使患者获得较好的治疗体验。
附图说明
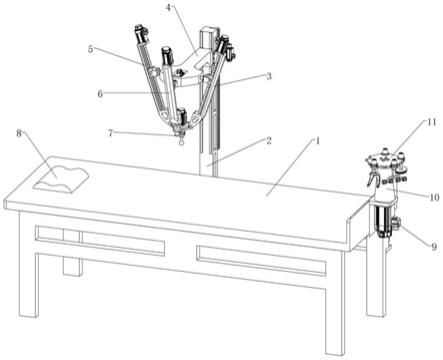
19.图1为本发明的整体结构示意图。
20.图2为本发明的整体结构示意图。
21.图3为并联机构的局部放大结构示意图。
22.图4为动平台位置的爆炸结构示意图。
23.图5为横臂竖移机构的放大结构示意图。
24.图6为转盘机构的放大结构示意图。
25.图7为筋膜枪的爆炸结构示意图。
26.图8为按摩杆的局部剖视结构示意图。
27.图9为五个按摩头的整体结构示意图。
28.附图标号:1床、1.1让位孔、1.2第一齿条、2立柱、3第一臂、4横臂、5第二臂、6第三臂、7摄像头、8头枕、9转盘电机、10转盘支架、11转盘、12齿轮、13纵移电机、14第一电机、15第一丝杠、16第一滑块、17第一转架、18移动板、18.1第一转耳、18.2第二转耳、18.3球窝、19执行板、19.1导向柱、19.2传感器安装位、19.3锥套、20第五电机、20.1外花键、21第二转架、
22第二滑块、23第二丝杠、24第二电机、25第四电机、26第三转架、27第三丝杠、28第三滑块、29第三电机、30压力传感器、31蜗杆、32同步带、33第二齿条、34电机架、35竖移电机、a筋膜枪、a1第一锥轴、a1.1凸起条、a2上转轴、a2.1第一内花键、a2.2下棘轮盘、a3震动杆、a3.1上棘轮盘、a3.2凹槽、a4弹簧、b按摩杆、b1第二锥轴、b2指杆、b2.1第二内花键、c经络刷、d按摩叉、e按摩轮。
具体实施方式
29.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
30.如图1、图2所示,所述的床1下侧设有四个支腿并形成稳定支撑,床1上侧设有平整的床板,可供患者躺卧,床板前端设有让位孔1.1,让位孔1.1为上宽下窄的通孔结构,可供患者俯卧时脸部放置于让位孔1.1中,头枕8上侧设有波浪结构的海绵支撑,头枕8下侧设有凸起,凸起形状与让位孔1.1形状相同,头枕8下侧的凸起可插入让位孔1.1中,从而头枕8上侧的海绵支撑可供患者在仰卧时支撑头部,床1右侧纵向设置有第一齿条1.2和两个平行的导轨。
31.如图2、图6所示,所述的转盘支架10下端通过螺钉与床板后端固定连接,转盘支架10上端设有锥圆柱形的支架结构,支架结构内部设置有传动轴,传动轴与支架结构构成转动副,传动轴上端与转盘11同轴紧固连接,传动轴下端与转盘电机9的输出轴同轴紧固连接,转盘电机9通过螺钉固定安装于转盘支架10下侧,从而转盘电机9可驱动转盘11的转动。
32.所述的转盘11周向均布设有五个卡位,每个卡位均可对应放置一个按摩头,每个卡位两侧均设置有两个卡片结构,可利用材料自身的弹性变形将按摩头卡紧。
33.如图2所示,所述的立柱2竖向设置于床1右侧,立柱2下端固定设置有两个滑块,两个滑块分别与床1右侧的两个导轨配合安装,从而使立柱2与床1构成移动副,纵移电机13通过螺钉紧固安装于立柱2下端,齿轮12与纵移电机13的输出轴同轴紧固连接,齿轮12与第一齿条1.2配合安装构成齿轮齿条啮合传动结构,从而纵移电机13可驱动立柱2相对于床1的移动。
34.如图5所示,所述的第二齿条33通过螺钉竖向紧固安装于立柱2后侧上端,第二齿条33的齿牙为斜齿,立柱2前侧竖向设置有两个平行导轨,横臂4后端设有两个滑块,两个滑块分别与立柱2前侧的两个导轨配合安装,从而横臂4与立柱2构成移动副,电机架34通过螺钉紧固安装于横臂4后端,蜗杆31安装于电机架34右端内侧并构成转动副,蜗杆31为单头蜗杆并与第二齿条33配合构成具有自锁性能的蜗杆齿条传动,蜗杆31上端同轴设置有一个同步带轮,竖移电机35通过螺钉紧固安装于电机架34右端外侧,竖移电机35输出轴上同轴紧固设置有一个同步带轮,同步带32安装于竖移电机35上的同步带轮与蜗杆31上的同步带轮之间构成同步带传动,从而竖移电机35可通过同步带32驱动蜗杆31的转动,进而驱动横臂4在立柱2上的移动和定位。
35.如图3所示,所述的第一支臂由第一臂3、第一电机14、第一滑块16、第一转架17、第一丝杠15构成,其中第一臂3内侧设置有两个平行的导轨,第一电机14通过螺钉紧固安装于第一臂3上端,第一滑块16下侧设置有两个滑块,两个滑块分别与第一臂3内侧的两个导轨配合安装,从而第一滑块16可在第一臂3内侧上下移动,第一丝杠15转动安装于第一臂3内
侧,第一丝杠15上端与第一电机14的输出轴同轴紧固连接,第一滑块16内部设有丝杠螺纹孔,第一丝杠15穿过丝杠螺纹孔并与第一滑块16构成丝杠传动结构,从而第一电机14可驱动第一滑块16在第一臂3上的移动和定位,第一滑块16横向设置有短轴,短轴与第一转架17左端转动连接,第一转架17右端与横臂4左侧转动连接。
36.所述的第二支臂由第二臂5、第二电机24、第二滑块22、第二转架21、第二丝杠23构成,其中第二臂5内侧设置有两个平行的导轨,第二电机24通过螺钉紧固安装于第二臂5上端,第二滑块22下侧设置有两个滑块,两个滑块分别与第二臂5内侧的两个导轨配合安装,从而第二滑块22可在第二臂5内侧上下移动,第二丝杠23转动安装于第二臂5内侧,第二丝杠23上端与第二电机24的输出轴同轴紧固连接,第二滑块22内部设有丝杠螺纹孔,第二丝杠23穿过丝杠螺纹孔并与第二滑块22构成丝杠传动结构,从而第二电机24可驱动第二滑块22在第二臂5上的移动和定位,第二滑块22横向设置有短轴,短轴与第二转架21右端转动连接,第二转架21左端与横臂4右侧转动连接。
37.所述的第三支臂由第三臂6、第三电机29、第三滑块28、第三转架26、第三丝杠27、第四电机25构成,其中第三臂6下端设置有一个球面,第三臂6内侧设置有两个平行的导轨,第三电机29通过螺钉紧固安装于第三臂6上端,第三滑块28下侧设置有两个滑块,两个滑块分别与第三臂6内侧的两个导轨配合安装,从而第三滑块28可在第三臂6内侧上下移动,第三丝杠27转动安装于第三臂6内侧,第三丝杠27上端与第三电机29的输出轴同轴紧固连接,第三滑块28内部设有丝杠螺纹孔,第三丝杠27穿过丝杠螺纹孔并与第三滑块28构成丝杠传动结构,从而第三电机29可驱动第三滑块28在第三臂6上的移动和定位,第三滑块28横向设置有短轴,短轴与第三转架26前端转动连接,第三转架26后端与横臂4前端转动连接,横臂4前端设有空位,第四电机25通过螺钉紧固安装于横臂4前端的空位内,并且第三转架26后端与第四电机25的输出轴同轴紧固连接。
38.如图3、图4所示,所述的移动板18左侧设有第一转耳18.1,右侧设置有第二转耳18.2,前侧设置有球窝18.3,下侧设置有三个传感器安装位,移动板18内部还设置有四个导向孔,所述的执行板19上侧设有四个导向柱19.1和三个传感器安装位19.2,执行板19安装于移动板18下侧,且四个导向柱19.1分别穿过移动板18内部的四个导向孔,执行板19上的三个传感器安装位19.2中均安装有一个压力传感器30,且每个压力传感器30上端均对应安装于移动板18下侧的三个传感器安装位中,从而三个压力传感器30可实时监测执行板19与移动板18之间的压力,执行板19下侧设置有锥套19.3,锥套19.3内部设置有内锥面,内锥面采用莫氏锥度;所述的第五电机20通过螺钉紧固安装于执行板19上侧,第五电机20的输出轴上设置有外花键20.1,外花键20.1每个齿下端两侧均设置为75
°
的夹角;所述的摄像头7可采集患者身体图像信息并进行视觉定位,摄像头7安装于执行板19前端下侧。
39.如图3所示,所述的第一臂3下端与第一转耳18.1转动连接,第二臂5下端与第二转耳18.2转动连接,第三臂6下端的球面与球窝18.3配合安装构成球面副,从而横臂4、第一支臂、第二支臂、第三支臂、移动板18构成具有三个移动自由度和一个转动自由度的并联机构,其中横臂4是静平台,移动板18是动平台。
40.如图7所示,所述的筋膜枪a是一种软组织康复工具,通过高频率冲击放松身体的软组织,筋膜枪a由第一锥轴a1、上转轴a2、震动杆a3、弹簧a4组成,其中第一锥轴a1为中空结构,其上端外侧设置有外锥面,外锥面采用与锥套19.3内部的内锥面相同角度的莫氏锥
度,第一锥轴a1下端周向均布设置有四个凸起条a1.1,所述的上转轴a2上端设置有第一内花键a2.1,上转轴a2下端设置有下棘轮盘a2.2,震动杆a3下端为圆球结构,圆球结构外侧包覆软质硅胶,震动杆a3上端设有上棘轮盘a3.1,靠近震动杆a3上端位置周向均布设置有四个凹槽a3.2,震动杆a3同轴安装于第一锥轴a1内部,且上棘轮盘a3.1与下棘轮盘a2.2啮合构成棘轮啮合结构,四个凸起条a1.1分别与凹槽a3.2配合,从而震动杆a3与第一锥轴a1构成移动副,弹簧a4同轴安装于第一锥轴a1内部,且弹簧a4上端与上棘轮盘a3.1下侧压紧,弹簧a4下端与第一锥轴a1内部下端压紧,从而在弹簧a4弹力作用下上棘轮盘a3.1始终与下棘轮盘a2.2压紧。
41.如图8所示,所述的按摩杆b由第二锥轴b1和指杆b2构成,其中第二锥轴b1为中空结构,其上端外侧设置有外锥面,外锥面采用与锥套19.3内部的内锥面相同角度的莫氏锥度,指杆b2上端设有第二内花键b2.1,并同轴安装于第二锥轴b1内部构成转动副,指杆b2下端设置为模拟手指的弯曲结构。
42.如图9所示,所述经络刷c上端设有的第三锥轴与第二锥轴b1结构相同,刷杆同轴转动安装于第三锥轴内部,刷杆上端设有的第三内花键与第二内花键b2.1结构相同,刷杆下端设有刷毛,刷毛为tpu材质;所述的按摩叉d上端设有的第四锥轴与第二锥轴b1结构相同,叉杆同轴转动安装于第四锥轴内部,叉杆上端设有的第四内花键与第二内花键b2.1结构相同,叉杆下端设有分叉结构,用来模拟两个手指同时作用时的按摩效果;所述的按摩轮e上端设有的第五锥轴与第二锥轴b1结构相同,轮杆同轴转动安装于第五锥轴内部,轮杆上端设有的第五内花键与第二内花键b2.1结构相同,轮杆下端转动安装有四个按摩轮,每个按摩轮外圆柱面上周向均布设置有凸起。
43.实施例一:按摩头的种类数量为五个,分别为筋膜枪a、按摩杆b、经络刷c、按摩叉d、按摩轮e,其中筋膜枪a可对患者软组织进行高频冲击,达到放松身体,缓解肌肉酸痛疲劳的效果;按摩杆b可模仿单个手指对患者穴道进行揉压,并且按摩杆b可进行旋转,具有很高的灵活性;经络刷c可对患者皮肤表面进行揉刷,舒缓皮肤表面经络,经络刷c可根据需要进行旋转;按摩叉d可对患者脊柱两侧肌肉进行揉压,舒缓背部肌肉,按摩叉d可根据需要进行转动,以调整方向;按摩轮e可在患者皮肤表面进行滚动,缓解肌肉酸痛和精神紧张,按摩轮e可根据需要朝任意方向进行滚动按摩;五个按摩头均安装于转盘11上对应的卡位中。
44.实施例二:第一锥轴a1、第二锥轴b1、第三锥轴、第四锥轴、第五锥轴上端均设有相同的外锥面,外锥面与锥套19.3内部的内锥面采用角度相同的莫氏锥度,从而外锥面和内锥面接触并施加一定压力后便可紧紧贴合,实现按摩头与执行板19的连接。
45.实施例三:第一锥轴a1上端的外锥面与锥套19.3内部的内锥面连接后,可将筋膜枪a安装至执行板19下侧,同时第五电机20输出轴上的外花键20.1会插入到上转轴a2上端的第一内花键a2.1中构成花键传动结构,从而第五电机20逆时针转动后下棘轮盘a2.2通过上棘轮盘a3.1推动震动杆a3向下移动,下棘轮盘a2.2转过一个棘齿后,震动杆a3在弹簧a4的弹力作用下向上移动,使上棘轮盘a3.1再次与下棘轮盘a2.2啮合,第五电机20连续转动可使震动杆a3持续上下振动,从而震动杆a3下端的圆球结构可对患者软组织实现持续的冲击,达到按摩的效果。
46.实施例四:安装按摩头时,以筋膜枪a为例,首先转盘电机9转动,使筋膜枪a转动至最前工位,立柱2移动至床1后端,并联机构动作,使执行板19下侧的锥套19.3移动至筋膜枪
a正上方,之后执行板19下降使筋膜枪a中第一锥轴a1上端的外锥面插入到锥套19.3内部的内锥面中并施加一定压力后,向前平移执行板19使筋膜枪a脱离转盘11上的卡位,从而完成筋膜枪a的安装;安装其他按摩头的过程和原理与上述相同。
47.实施例五:更换按摩头时,以卸载筋膜枪a并安装按摩杆b为例,首先转盘11转动将空置的卡位旋转至最前工位,立柱2移动至床1后端,并联机构动作,使筋膜枪a移动至空置卡位前端,之后向后平移执行板19,使筋膜枪a进入到转盘11的卡位中,之后执行板19向上移动使锥套19.3与第一锥轴a1脱离,接着转盘11转动使按摩杆b转动至最前工位,之后执行板19向下移动,使第二锥轴b1锥轴上端的外锥面插入锥套19.3内部的内锥面中并施加一定压力,同时第五电机20输出轴上的外花键20.1插入到指杆b2上端的第二内花键b2.1中,之后向前平移执行板19使按摩杆b脱离转盘11上的卡位,从而完成按摩头的更换;更换其他按摩头的过程和原理与上述相同。
48.实施例六:按摩设备可由上位机进行控制,将患者病情参数输入上位机后,上位机可自动制定适合患者的按摩方案,并记录患者的治疗情况。
49.实施例七:在按摩时,不同的部位需要不同的按摩力度,压力传感器30可实时监测刮板对患者的压力,能获得较好的按摩效果;在上位机中设置压力阈值后,可防止按摩压力过大而对患者造成伤害。
50.实施例八:摄像头7可采集患者的体型图像信息,经上位机进行处理后可得到患者体型数据和穴位的空间位置,从而并联机构可根据具体的按摩方式选择合适的按摩头对患者的相关经络穴道进行按摩。
51.实施例九:初始状态时,立柱2位于床1后端,按摩头上升至高位,从而在床1左侧留出较大空间,便于患者上下床1。
52.实施例十:按摩背部时,首先将头枕8取走,露出床板前端设有让位孔1.1,患者可俯卧在床板上,并将面部放置于让位孔1.1中,从而可使背部平整,使患者具有较为舒适的姿态,也便于设备进行自动按摩;
53.按摩腹部时,首先将头枕8下侧的凸起插入让位孔1.1中实现头枕的固定,患者可仰卧于床板上,并将头部放置于头枕8上,使患者具有较为舒适的姿态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1