一种基于模板的手术导航装置的制作方法
1.本技术涉及医疗器械及应用技术领域,具体而言,涉及一种基于模板的手术导航装置。
背景技术:
2.目前,粒子植入全称为“放射性粒子植入治疗技术”,是一种将放射源植入肿瘤内部,让其以摧毁肿瘤的治疗手段。粒子植入治疗技术涉及放射源,其核心是放射粒子。临床运用的是一种被称为碘125的物质。每个碘125粒子就像一个小太阳,其中心附近的射线最强,可最大限度降低对正常组织的损伤。粒子植入治疗可以追溯到上世纪初。放射性粒子植入治疗早期前列腺癌在美国等成为标准治疗手段,在国内其治疗理念也渐渐得到认可。
3.现有技术中,现阶段的3d打印模板应用于粒子植入主要流程如下:病人扫描术前ct图像;将病人扫描术前ct图像导入tps(treatment planning system,计划治疗系统)软件,医生在tps软件中做计划;根据医生所做治疗计划打印3d模板;将模板放置在病人身上,进行粒子植入手术。但现阶段使用存在如下问题:模板的放置有时候会出现偏差,放置的偏差必定会带来植入针位置的不准确;以及进行粒子植入针放置的过程中,缺少实时的术中导航,使医生不能实时的知道粒子植入针的实时位置以及入针角度等信息,影响治疗效果。
技术实现要素:
4.本技术实施例的目的在于提供一种在ct引导下基于模板的手术导航装置及方法,该手术导航装置可以通过光学模板示踪器实现3d打印模板的精准放置,并在进行微创介入针治疗的过程中实现实时引导和定位,从而提高微创介入手术的治疗效果。
5.第一方面,本技术实施例提供了一种基于模板的手术导航装置,包括3d打印模板、光学模板示踪器以及双球器械示踪器;
6.所述3d打印模板上设置有微创介入针针道和光学模板示踪器插接口,亦可直接将光学模板示踪器打印在3d模板上(这时就不需要打印光学模板示踪器插接口);所述3d打印模板与目标部位相互贴合,所述微创介入针针道的位置与所述示踪器插接口的位置相互错开;
7.所述光学模板示踪器安装在所述示踪器插接口上(如上所述也可以直接是和3d打印模板同时打印出来),所述双球器械示踪器与微创介入针固定安装。
8.在上述实现过程中,该手术导航装置通过在3d打印模板上安装光学模板示踪器,在进行微创介入手术时,通过光学模板示踪器对3d打印模板进行定位,有效避免3d打印模板放置时的偏差,可以实现3d打印模板的精准放置;同时,在进行微创介入治疗的过程中,通过将双球器械示踪安装到微创介入针上可以实现对微创介入针进行实时引导和定位,使医生可以实时的知道微创介入针的位置以及入针角度等信息,提高微创介入手术的治疗效果。
9.进一步地,所述光学模板示踪器包括示踪器连接口和示踪器支架,所述示踪器连
接口接入所述示踪器插接口,所述示踪器连接口固定安装在所述示踪器支架上。亦可将光学模板示踪器直接通过3d打印技术打印到3d模板上。
10.在上述实现过程中,通过将光学模板示踪器连接口插入光学模板示踪器插接口,将光学模板示踪器固定安装在3d打印模板上,两者相互固定,通过定位光学模板示踪器的位置即可定位3d打印模板的位置。
11.进一步地,所述光学模板示踪器还包括多个反光小球,所述示踪器支架设置有多个安装位置,所述多个反光小球分别安装在所述示踪器支架的多个安装位置上。
12.在上述实现过程中,通过导航相机对多个反光小球进行定位,可以精确追踪光学模板示踪器的位置,进而精确追踪3d打印模板的位置。
13.进一步地,所述光学模板示踪器还至少包括不在同一条直线上的三个反光小球。
14.在上述实现过程中,不在同一条直线上的至少三个的反光小球可建立三维的直角坐标系,从而通过导航相机即可确定光学模板示踪器的示踪器坐标系。
15.进一步地,所述双球器械示踪器用来安装到微创介入针上。
16.在上述实现过程中,将双球器械示踪器安装到微创介入针上,在微创介入手术的过程中即可通过追踪双球器械示踪器对微创介入针实现实时引导和定位。
17.进一步地,所述双球器械示踪器还包括两个反光小球,所述双球器械示踪器支架设置有两个安装位置,所述两个反光小球分别安装在所述示踪器支架的两个安装位置上,且所述两个反光小球均处于所述穿刺针的延长线位置。
18.在上述实现过程中,双球结构的光学器械示踪器,体积更小,在3d打印模板的微创介入针针道密集的情况下,针与针的相互干涉更少,可以更有效的应用于术中实时导航,从而辅助医生更好的完成粒子植入手术。
19.进一步地,所述双球器械示踪器还包括固定机构,所述固定机构固定安装在所述双球器械示踪器支架上,通过所述固定机构将双球器械示踪器安装到微创介入针上。
20.第二方面,本技术实施例提供了一种基于模板的手术导航方法,应用于第一方面任一项所述的基于模板的手术导航装置,所述方法包括:
21.根据预设微创介入针针道位置打印3d模板,所述3d模板通过光学模板示踪器接口安装有光学模板示踪器、或者直接打印出带有光学模板示踪器支架的3d模板;
22.基于所述光学模板示踪器的原点位置从患者的术前ct图像中选取用于术前比对的参考层面图像;
23.获取术中ct图像,根据所述光学模板示踪器的原点位置选取术中比对的层面图像;
24.调整所述3d打印模板的位置,以使所述术前比对的参考层面图像和术中比对的层面图像重合一致;
25.根据所述双球器械示踪器的导航,完成微创介入针的操作,即完成微创介入针的实时引导和定位。
26.进一步地,所述术前ct图像和所述术中ct图像为病患在同一体位下进行ct扫描后获得。
27.在上述实现过程中,病患在同一体位下进行ct扫描获得术前ct图像和术中ct图像,从而在进行微创介入手术的过程中,可将术前比对的参考层面图像和术中比对的层面
图像进行对比:术前比对的参考层面图像和术中比对的层面图像重合一致时,则说明3d打印模板正确放置在病患的目标部位上。
28.进一步地,所述根据所述双球器械示踪器的导航,完成微创介入针的操作,包括:
29.将所述双球器械示踪器安装到所述微创介入针上;
30.根据所述微创介入针的长度设置所述微创介入针的针尖位置信息;
31.根据所述双球器械示踪器的位置信息和所述针尖位置信息计算所述微创介入针的针尖在所述术中ct图像中的位置,完成所述微创介入针的实时引导和定位。
32.本技术公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本技术公开的上述技术即可得知。
33.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
34.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
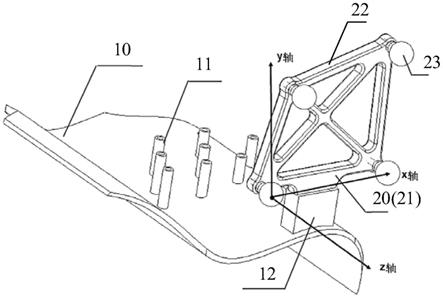
35.图1为本技术实施例提供的一种基于模板的手术导航装置的结构示意图;
36.图2为本技术实施例提供的双球器械示踪器的结构示意图;
37.图3为本技术实施例提供的一种基于模板的手术导航方法的流程示意图;
38.图4为本技术实施例提供的光学模板示踪器导航的流程示意图。
具体实施方式
39.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
41.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本技术中的具体含义。
42.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或点连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的联通。对于本领域
普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
43.此外,术语“第一”、“第二”等主要是用于区分不同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量。除非另有说明,“多个”的含义为两个或两个以上。
44.基于模板的手术最典型的应用是放射性粒子植入以及不可逆电穿孔等消融手术。本技术实施例以放射性粒子植入作为典型来进行描述。
45.本技术实施例提供了一种基于模板的手术导航装置及方法,可以应用于粒子植入手术、纳米消融等手术中,例如对粒子植入针将进行实时引导和定位;该手术导航装置通过在3d打印模板上安装光学模板示踪器,在进行微创介入手术时,通过光学模板示踪器对3d打印模板进行定位,可以对3d打印模板进行精准放置;同时,在进行微创介入治疗的过程中,将微创介入针安装到双球器械示踪器上可以对实现对微创介入针进行实时引导和定位,使医生可以实时的知道微创介入针的位置以及入针角度等信息,提高微创介入手术的治疗效果。
46.请参见图1和图2,图1为本技术实施例提供的一种基于模板的手术导航装置的结构示意图,图2为本技术实施例提供的双球器械示踪器的结构示意图,该手术导航装置包括3d打印模板10、光学模板示踪器20以及双球器械示踪器30光学模板示踪器20包括示踪器连接口21、示踪器支架22和反光小球23。
47.示例性地,3d打印模板10上设置有微创介入针道11和示踪器插接口12,3d打印模板10与目标部位相互贴合,微创介入针道11的位置与示踪器插接口12的位置相互错开。
48.示例性地,3d打印(3dp)即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。3d打印通常是采用数字技术材料打印机来实现的。常在模具制造、工业设计等领域被用于制造模型,后逐渐用于一些产品的直接制造,已经有使用这种技术打印而成的零部件。该技术在珠宝、鞋类、工业设计、建筑、工程和施工、汽车,航空航天、牙科和医疗产业、教育、地理信息系统、土木工程、枪支以及其他领域都有所应用。
49.示例性地,3d打印模板10通过3d打印获得;可选地,医生通过tps软件规划病患的微创介入手术计划,然后输出模板数据,通过模板数据打印输出3d打印模板10。
50.示例性地,微创介入针道11为医生通过tps软件所规划的微创介入针的针道;光学模板示踪器20上设置有多个位置固定的反光小球23,通过导航相机和反光小球23,可以追踪光学模板示踪器20的位置,进而追踪3d打印模板10的位置。
51.在一些实施方式中,微创介入针道11的位置与示踪器插接口12的位置相互错开,从而示踪器插接口12处打印的位置不会对微创介入针道11造成干扰,可选地,示踪器插接口12可以设置在在所有微创介入针道11的最前端;其在ct扫描下的坐标可以通过tps软件读到,从而光学模板示踪器20的反光小球23在ct扫描坐标系下的位置即可得到,进而可以得到光学模板示踪器20的示踪器坐标系和ct扫描坐标系的对应关系,示踪器坐标系和ct扫描坐标系可相互转换系。
52.示例性地,光学模板示踪器20的示踪器坐标系的各个轴的方向如图1所示。
53.示例性地,光学模板示踪器20安装在示踪器插接口12上。
54.示例性地,光学模板示踪器20通过示踪器插接口12固定安装在3d打印模板10上,
通过定位光学模板示踪器20的具体位置,即可定位3d打印模板10的具体位置;从而,将3d打印模板10放置在病患的目标部位处时,可有效避免3d打印模板10的放置偏差。
55.在一些实施场景中,该手术导航装置通过在3d打印模板10上安装光学模板示踪器20,在进行微创介入手术时,通过光学模板示踪器20对3d打印模板10进行定位,可有效避免3d打印模板10放置时的偏差,引导精准放置的功能;同时,在进行微创介入针放置的过程中,通过将微创介入针安装在双球器械示踪器上可以进行微创介入针的实时的术中引导和放置,使医生可以实时的知道微创介入针的位置以及入针角度等信息,从而可以提高微创介入手术的治疗效果。
56.也可以将光学模板示踪器直接通过3d打印,打印到3d模板上(此时就不需要打印示踪器插接口)。
57.示例性地,通过将示踪器连接口21插入示踪器插接口12,将光学模板示踪器20固定安装在3d打印模板10上,两者相互固定,通过定位光学模板示踪器20的位置即可定位3d打印模板10的位置。
58.请参见图2,图2为本技术实施例提供的双球器械示踪器的结构示意图,该双球器械示踪器30包括双球器械示踪器支架32、反光小球33固定机构35其作用是用于固定安装在微创介入针上。
59.示例性地,通过导航相机对多个反光小球23进行定位,可以精确追踪光学模板示踪器20的位置,进而精确追踪3d打印模板10的位置。
60.示例性地,四个反光小球23可建立三维的直角坐标系,从而通过导航相机即可确定光学模板示踪器20的示踪器坐标系。
61.示例性地,在通过光学模板示踪器20对3d打印模板10进行定位,将3d打印模板10精确放置在病患的目标部位后,固定3d模板;将微创介入针34固定安装在双球器械示踪器30下,在微创介入手术的过程中即可通过双球器械示踪器30对微创介入针实现实时定位和引导。
62.示例性地,双球器械示踪器30还包括两个反光小球33,示踪器支架32设置有两个安装位置,两个反光小球33分别安装在示踪器支架32的两个安装位置上,且两个反光小球33均处于微创介入针34的延长线位置(微创介入针34不是本实用新型的内容,是现有的产品)。
63.示例性地,双球结构的光学器械示踪器30,体积更小,在3d打印模板10的微创介入针道11密集的情况下,针与针的相互干涉更少,可以更有效的应用于术中实时导航,从而辅助医生更好的完成粒子植入手术。
64.在一些实施方式中,在微创介入手术规划的针道比较密集的情况下,可首先通过四球结构的光学模板示踪器20对3d打印模板10进行定位,将3d打印模板精确放置在病患的目标部位处并固定;然后采用双球器械示踪器30对微创介入针进行定位,可很好的解决针与针之间的相互干涉,满足多针微创介入手术的要求。
65.示例性地,双球器械示踪器还包括固定机构35,固定机构35固定安装在示踪器支架32上,通过固定机构35可将双球器械示踪器固定在微创介入针34上(微创介入针34不是本实用新型的内容,是现有的产品)。
66.请参见图3,图3为本技术实施例提供的一种基于模板的手术导航方法的流程示意
图,应用于图1至图2所示的基于模板的手术导航装置,该手术导航方法包括如下步骤:
67.s100:根据预设微创介入针针道位置打印3d模板,3d模板通过光学模板示踪器接口安装有光学模板示踪器、或者直接打印出带有光学模板示踪器支架的3d模板;
68.s200:基于光学模板示踪器的原点位置从患者的术前ct图像中选取用于术前比对的参考层面图像;
69.s300:获取术中ct图像,根据光学模板示踪器的原点位置选取术中比对的层面图像;
70.s400:调整3d打印模板的位置,以使术前比对的参考层面图像和术中比对的层面图像重合一致;
71.s500:根据双球器械示踪器的导航,完成微创介入针的操作。
72.示例性地,术前ct图像为病患在进行微创介入手术之前,通过ct扫描获得的ct图像;术中ct图像为病患在进行微创介入手术时,通过ct扫描实时获得的ct图像。
73.在一些实施方式中,术前ct图像和术中ct图像为病患在同一体位下进行ct扫描后获得。
74.示例性地,病患在同一体位下进行ct扫描获得术前ct图像和术中ct图像,从而在进行微创介入手术的过程中,可将术前比对的参考层面图像和术中比对的层面图像基本重合一致:当术前比对的参考层面图像和术中比对的层面图像基本重合一致时,则说明3d打印模板正确放置在病患的目标部位上。
75.请参见图4,图4为本技术实施例提供的双球器械示踪器导航的流程示意图,包括如下步骤:
76.s510:将双球器械示踪器安装到微创介入针上;
77.s520:根据微创介入针的长度设置微创介入针的针尖位置信息;
78.s530:根据双球器械示踪器的位置信息和针尖位置信息计算微创介入针的针尖在术中ct图像中的位置,完成微创介入针的实时引导和定位。
79.在一些实施方式中,病患进行ct扫描,并获得术前ct图像,将术前ct图像传至tps软件,医生根据病灶位置和区域进行微创介入计划,待计划做完以后,在不影响针道放置的3d打印模板的最前端打印上一个示踪器插接口,示踪器插接口用来放置光学模板示踪器,并且将示踪器插接口的位置记录并输入到术前模板生成软件中,完成光学模板示踪器的示踪器坐标系和术前ct扫描坐标系之间的坐标转换。
80.在一些实施方式中,将医生用于进行微创介入计划的术前ct图像传输到术前模板生成软件中,并且将打印好的带有示踪器插接口的3d打印模板和光学模板示踪器连接好;然后,将3d打印模板放置到导航相机可以看到地方,术前模板生成软件中可以根据光学模板示踪器的原点位置进行轴状位和矢状位的切片生成,同时可以根据医生需求设置所生成切片的层厚。将生成的术前模板切片图像保存,等待术中实时手术时使用。
81.在一些实施方式中,在对病患进行微创介入手术的过程中,先让病患以和术前体位相同的体位进行ct扫描,并且将术中扫描的ct图像传输到术中实时导航软件,放置打印好的带有光学模板示踪器的3d打印模板在病患的目标部位上,导入术前模板切片图像,同时开启术中模板实时生成功能,即可将当前模板所生成的术中模板切片图像与术前模板的术前模板切片图像进行实时的对比,如果术中模板切片图像和术前模板切片图像差距比较
多,微调3d打印模板,直到术中模板切片图像和术前模板切片图像基本完全一致,从而实现3d打印模板的精准放置,可以按照规划进行微创介入手术。
82.在一些实施方式中,医生将双球器械示踪器安装到微创介入针安装上,可以根据微创介入针的不同长度在导航软件中设置针尖的位置,设置完以后,导航相机可以追踪到双球器械示踪器的位置,从而根据设置的针尖位置计算出实际微创介入针的针尖在导航相机坐标系下的位置,从而得到微创介入针的针尖在ct图像中的位置,实现微创介入针的实时定位和引导功能。
83.示例性地,由于双球器械示踪器体积小,易拆卸的特点。即使在tps软件中规划的植入针道比较密集,也可以很好的完成每根针的导航。
84.在本技术所有实施例中,“大”、“小”是相对而言的,“多”、“少”是相对而言的,“上”、“下”是相对而言的,对此类相对用语的表述方式,本技术实施例不再多加赘述。
85.应理解,说明书通篇中提到的“在本实施例中”、“本技术实施例中”或“作为一种可选的实施方式”意味着与实施例有关的特定特征、结构或特性包括在本技术的至少一个实施例中。因此,在整个说明书各处出现的“在本实施例中”、“本技术实施例中”或“作为一种可选的实施方式”未必一定指相同的实施例。此外,这些特定特征、结构或特性可以以任意适合的方式结合在一个或多个实施例中。本领域技术人员也应该知悉,说明书中所描述的实施例均属于可选实施例,所涉及的动作和模块并不一定是本技术所必须的。
86.在本技术的各种实施例中,应理解,上述各过程的序号的大小并不意味着执行顺序的必然先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
87.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应与权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1