一种具备自锁能力的长度调节装置的制作方法
1.本实用新型涉及康复医疗设备技术领域,具体为一种具备自锁能力的长度调节装置。
背景技术:
2.康复机器人作为一种医疗康复训练设备,能够辅助那些因疾病或意外事故而导致的肢体运动功能损伤患者进行康复训练。和康复治疗师“一对一”辅助患者进行康复训练相比,康复机器人具有动作模式丰富、动作重复精度高、动作准确可控等优点,机器人化康复训练,不仅可以将康复医师从繁重而重复的体力劳动中解脱出来,而且可以显著增强康复治疗效果。
3.根据肢体参与程度的不同,上肢康复训练分为单侧训练和双侧训练。双侧训练在早期康复治疗过程中,可通过健侧带动患侧的方式提高患者康复训练的主观参与度,进而增强治疗效果;在中后期康复治疗过程中,可通过双臂联动的方式训练双臂协调运动能力,使患者早日恢复生活自理能力。一般而言,在物理治疗师的指导和监督下,双臂康复机器人可有效辅助患者完成双侧康复训练。在使用过程中,双臂康复机器人肩关节之间的距离需要与患者肩宽相匹配,机械手臂肩关节中心需要与患者肩关节中心对齐,否则会影响患者康复训练的舒适性甚至对患者造成伤害。为了适应不同体型的患者,提高康复机器人的适应性,有效的辅助患者的康复,双臂外骨骼康复机器人肩部之间的宽度需要可连续的无级对称调节,并且调节到合适的长度可进行锁定,以保持两机械手臂肩关节之间的距离不变。为此,我们提出一种具备自锁能力的长度调节装置。
技术实现要素:
4.本实用新型的目的在于提供一种具备自锁能力的长度调节装置,用于调节上肢双臂康复机器人肩关节之间的距离,以适应不同患者的肩部宽度。
5.为实现上述目的,本实用新型提供如下技术方案:一种具备自锁能力的长度调节装置,包括调节手柄、长度调节及自锁机构和固定基座;所述调节手柄固定于长度调节及自锁机构上,并用于控制长度调节及自锁机构的解锁和锁定,所述固定基座用于固定长度调节及自锁机构;
6.所述长度调节及自锁机构包括上移动块、蜗杆、直线导轨限位块、竖直传动轴、蜗轮、下移动块、齿轮、水平传动轴、齿条、直线导轨、滑块;
7.所述调节手柄通过紧定螺钉固定于竖直传动轴上端,所述调节手柄与竖直传动轴可同轴转动,所述蜗轮同轴固定于水平传动轴上并与蜗轮相互啮合;
8.所述齿轮同轴固定于水平传动轴上并与上下两个齿条相互啮合,上下两个齿条互相平行且沿水平方向安装,上下两个齿条前表面沿水平方向设有安装孔,分别用于安装上移动块和下移动块,上下两个滑块前表面分别设有安装孔,分别用于固定在上移动块和下移动块后表面;
9.上下两个滑块分别安装于上下两个直线导轨的前表面上,所述直线导轨关于水平传动轴上下对称布置并被直线导轨限位块固定于后侧固定板内侧面,所述左侧安装板与右侧安装板内侧面分别与上下两个直线导轨的左右两端重合,所述导轨限位块分别位于上下两个直线导轨左右两端,呈对称分布。
10.固定基座包括u型固定板、左侧密封外观、左侧安装板、后侧固定板、右侧密封外观、右侧安装板、轴承固定块;u型固定板上下侧板留有安装孔,用于安装轴承固定块,u型固定板上下侧板固定于后侧固定板上,左侧安装板及右侧安装板内侧留有安装孔,用于安装轴承固定块,左侧安装板及右侧安装板分别固定于后侧固定板左右两侧,左侧密封外观及右侧密封外观对称固定于u型固定板左右两侧。
11.优选的,所述竖直传动轴的上下两端分别与深沟球轴承同轴安装,所述轴承固定块设有安装孔,上下两个深沟球轴承同轴固定于轴承固定块中。
12.优选的,所述水平传动轴的前后两端与深沟球轴承同轴安装,前后两端的深沟球轴承同轴固定于所述轴承固定块中。
13.与现有技术相比,本实用新型的有益效果如下:
14.可实现连续的、无级的、对称的长度调节功能,并具备自锁能力,无需外加锁定装置,具有结构简单、操作便捷、长度调节的范围大、性能可靠的特点,可以作为专门长度调节模块用于上肢双臂外骨骼康复机器人肩部宽度的调节装置或其他需要调节长度的机械装置上,能够提高上肢双臂外骨骼康复机器人对于不同患者的适用性,提高机器人的使用率。
附图说明
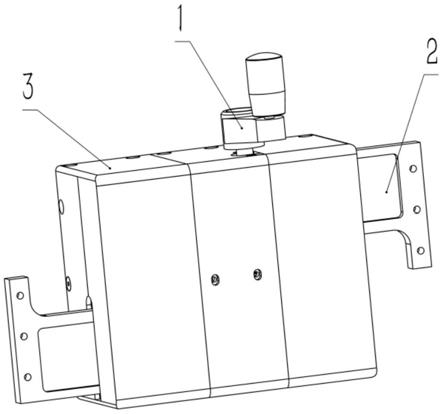
15.图1为本发明的具备自锁能力的长度调节装置前视整体轴测结构示意图;
16.图2为本发明的具备自锁能力的长度调节装置后视整体轴测结构示意图;
17.图3为隐藏左侧密封外观、右侧密封外观及u型固定板后的内部结构示意图。
18.图中:1、调节手柄;2、长度调节及自锁机构;201、上移动块;202、蜗杆;203、深沟球轴承;204、直线导轨限位块;205、竖直传动轴;206、蜗轮;207、下移动块;208、齿轮;209、水平传动轴;210、齿条;211、直线导轨;212、滑块;3、固定基座;301、u型固定板;302、左侧密封外观; 303、左侧安装板;304、后侧固定板;305、右侧密封外观;306、右侧安装板;307、轴承固定块。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.如图1所示,本技术提供了一种具备自锁能力的长度调节装置,包含调节手柄1、长度调节及自锁机构2、固定基座3。调节手柄1固定于长度调节及自锁机构2上,并用于控制长度调节及自锁机构2,固定基座3用于固定长度调节及自锁机构2。
21.如图2所示,固定基座3包括u型固定板301、左侧密封外观302、左侧安装板303、后侧固定板304、右侧密封外观305、右侧安装板306、轴承固定块307;u型固定板301上下侧板
留有安装孔,用于安装轴承固定块307,u 型固定板301上下侧板固定于后侧固定板304上,左侧安装板303及右侧安装板306内侧留有安装孔,用于安装轴承固定块307,左侧安装板303及右侧安装板306分别固定于后侧固定板304左右两侧,左侧密封外观302及右侧密封外观305对称固定于u型固定板301左右两侧。
22.如图3所示,长度调节及自锁机构2包括上移动块201、蜗杆202、深沟球轴承203、直线导轨限位块204、竖直传动轴205、蜗轮206、下移动块207、齿轮208、水平传动轴209、齿条210、直线导轨211、滑块212。调节手柄1 通过紧定螺钉固定于竖直传动轴205上端,调节手柄1与竖直传动轴205可同轴转动,竖直传动轴205上下两端分别与深沟球轴承203同轴安装,轴承固定块307设有安装孔,上下深沟球轴承203可同轴固定于轴承固定块307 中,蜗轮206同轴固定于水平传动轴209上并与蜗轮206相互啮合,水平传动轴209前后两端与深沟球轴承203同轴安装,前后两端深沟球轴承203同轴固定于轴承固定块307中,齿轮208同轴固定于水平传动轴209上并与上下齿条210相互啮合,上下齿条210互相平行且沿水平方向安装,上下齿条 210前表面沿水平方向设有安装孔,分别用于安装上移动块201和下移动块 207,上下滑块212前表面分别设有安装孔,分别用于固定在上移动块201和下移动块207后表面,上下滑块212分别安装于上下直线导轨211的前表面上,直线导轨211关于水平传动轴209上下对称布置并被直线导轨限位块204 固定于后侧固定板304内侧面,左侧安装板303与右侧安装板306内侧面分别与上下直线导轨211左右两端重合,导轨限位块分别位于上下直线导轨211 左右两端,呈对称分布。
23.工作原理:
24.当需要增加长度时,此时调节手柄1转动的方向应使蜗杆202带动蜗轮 206顺时针旋转。通过连续同一方向转动调节手柄1,带动竖直传动轴205与蜗杆202同轴转动,蜗杆202与蜗轮206相互啮合,使蜗轮206顺时针旋转并带动水平传动轴209与齿轮208同轴转动,齿轮208与上下齿条210相互啮合,并分别带动上齿条210与上移动块201沿上直线导轨211水平向右移动,下齿条210与下移动块207沿下直线导轨211水平向左移动,使上移动块201与下移动块207左右两端之间的距离逐渐对称增加,当距离增加到合适的位置时,停止转动调节手柄1,使上移动块201与下移动块207停止移动,此时蜗轮206与蜗杆202之间无相对运动处于自锁状态。
25.同理,当需要减小长度时,此时调节手柄1转动的方向应使蜗杆202带动蜗轮206逆时针旋转。通过连续转动调节手柄1,带动竖直传动轴205与蜗杆202同轴转动,蜗杆202与蜗轮206相互啮合,使蜗轮206逆时针旋转并带动水平传动轴209与齿轮208同轴转动,齿轮208与上下齿条210相互啮合,并分别带动上齿条210与上移动块201沿上直线导轨211水平向左移动,下齿条210与下移动块207沿下直线导轨211水平向右移动,使上移动块201 与下移动块207左右两端之间的距离逐渐对称减小,当距离减小到合适的位置时,停止转动调节手柄1,使上移动块201与下移动块207停止移动,此时蜗轮206与蜗杆202之间无相对运动处于自锁状态。
26.本技术方案中,可实现连续的、无级的、对称的长度调节功能,并具备自锁能力,无需外加锁定装置,具有结构简单、操作便捷、长度调节的范围大、性能可靠的特点,可以作为专门长度调节模块用于上肢双臂外骨骼康复机器人肩部宽度的调节装置或其他需要调节长度的机械装置上,能够提高上肢双臂外骨骼康复机器人对于不同患者的适用性,提高机
器人的使用率。
27.长度调节及自锁机构2中采用上下齿条210与齿轮208啮合,调节手柄1 可连续任意角度旋转带动蜗杆202连续任意角度旋转,进而带动蜗轮206连续任意角度旋转,齿轮208可与蜗轮206同轴连续任意角度转动,进而带动上下齿条210水平方向连续任意距离的对称移动,从而带动移动块连续任意距离的对称移动,实现上移动块201与下移动块207之间的长度的连续无级的对称调节,调节手柄1的转动方向不同,可实现长度的增加或减小,并可在结构强度允许的情况下,可增加移动块和上下齿条210的长度来增加装置的长度调节范围,当调节完毕时,蜗杆202相对于蜗轮206自锁,从而使齿轮208和齿条210无法相对运动,实现装置的自锁。
28.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1