一种飞秒激光眼科近视手术用辅助关节的制作方法
1.本实用新型涉及医疗技术领域,尤其涉及一种飞秒激光眼科近视手术用辅助关节。
背景技术:
2.医疗机器人具有定位准确、运行稳定、灵巧性强、工作范围大、不怕辐射和感染等优点,不仅可以协助医生完成手术部位的精确定位,而且可以实现手术最小损伤,提高疾病诊断、手术治疗的精度和质量,提高手术安全,缩短治疗时间,降低医疗成本。近年来其研究已经成为机器人应用的新领域,尤其是多功能医疗机器人已经成为医疗机器人发展的一个新方向。
3.目前,外科手术机器人一般采用主从遥控作业方式。外科手术机器人的使用,有助于提高外科医生手术的精度,解决医生手部的颤抖、疲劳、肌肉神经的反馈,使医生能够在最舒适的状态下进行手术操作,对于提高手术的成功率、减轻患者痛苦具有重要价值。目前已成功用在微创外科、眼科、骨科等手术中。
4.飞秒激光眼科近视矫正手术是当前最为流行的近视眼矫正手术技术,通过激光聚焦从眼角膜中切出透镜状的组织,然后将组织取出,从而改变眼角膜的曲率,达到改变视焦距点的移动,从而治愈近视眼和散光。本项目在手术中的具体负责环节是在角膜切割之后将原有组织之间的角膜通过镊状机械结构取出,当前这个过程完全由医师手动完成,由于人体的生理性抖动和长时间手术所需求的集中力,使用精密,稳定的机械方式辅助医生可以极大地改善手术条件,提高手术成功率,同时降低手术难度,使手术的技术成本下降。
5.现有技术cn201610548724.9的单孔微创蛇形机器人,通过使用两部分预先弯曲的弹性薄片应力应变的叠加,以及由运动机构控制中间部分弹性薄片与外部弹性薄片的相对运动,行成机械臂不同的运动,可以避免多个机械臂之间的干涉,实现预期的运动轨迹。现有技术中,为了便于球铰接中的球头与球形凹槽相对转动,其配合间隙选取较大,同时也为了防止位于两个相邻关节单元之间的灰尘等杂质会直接进入球形铰接部位,继而会导致球头与球形凹槽之间的接触面随着关节单元之间的相对转动而产生磨损、划伤,在关节单元的球头部上设置阻隔环,阻隔环与环形槽配合,以将灰尘等杂物阻挡在球铰接外侧,保护球铰接的质量,同时,由于阻隔环与环形槽之间的接触面小,可以选取其之间的配合关系为间隙配合,继而进一步防止灰尘串入阻隔环与球形凹槽之间。但现有的关节单元因为阻隔环的设置,使得关节单元在进行球铰接时很复杂,不易安装。
技术实现要素:
6.本实用新型提出了一种飞秒激光眼科近视手术用辅助关节。
7.为了实现上述目的,本实用新型采用了如下技术方案:
8.一种飞秒激光眼科近视手术用辅助关节,包括关节段和偶数根驱动线,所述关节段包括若干个依次球铰接的关节单元,所述关节单元包括关节单元本体,所述关节单元本
体包括座体和筒体,所述筒体设置在座体上端,所述筒体上端设置有球头部,所述关节单元本体内部设置有球形凹槽,所述球形凹槽下部设置有环形槽,所述球形凹槽上端设置有螺栓孔,所述螺栓孔上端设置有升降槽,所述升降槽上端设有通孔,所述环形槽、球形凹槽、螺栓孔、升降槽、通孔依次相连通,所述筒体侧面设置有若干安装槽,所述安装槽通过连接槽与升降槽相连通,所述连接槽中通过铰接安装有摆动块,所述摆动块上设置有压板,所述螺栓孔中装有控制板,所述控制板上端通过连杆与升降杆连接,所述控制板由控制杆控制。
9.进一步地,所述球头部上设置有橡胶圈。
10.进一步地,所述控制板包括板体,所述板体中心设置有圆孔,所述圆孔周边设置有若干键槽。
11.进一步地,所述控制杆包括杆体,所述杆体侧壁上设置有若干轴向延伸的花键,所述控制杆的花键与控制板的键槽相配合,所述杆体末端设置有把手。
12.进一步地,所述螺栓孔上端设置有挡环。
13.进一步地,所述球头部的球径与球形凹槽的球径一致。
14.进一步地,所述环形槽也呈球状,所述环形槽的球心与球形凹槽的球心重合,且球心位于环形槽中,环形槽的球径大于球形凹槽的球径。
15.进一步地,所述球头部与球形凹槽配合,所述摆动块与环形槽配合。
16.进一步地,所述座体底部可拆卸的设置有挡板。
17.本实用新型具有以下有益之处:本实用新型通过设置可以摆动展开的摆动块方便了两个关节单元本体的球铰接安装,并且通过关节单元本体上的橡胶圈,完成了现有技术中防尘的功能。
附图说明
18.图1为本实用新型的摆动块展开时的结构示意图;
19.图2为本实用新型的摆动块收回时的结构示意图;
20.图3为本实用新型中关节单元本体的剖视结构示意图一;
21.图4为本实用新型中关节单元本体的剖视结构示意图二;
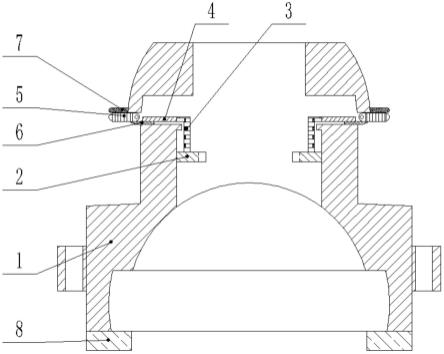
22.图5为本实用新型中两个关节单元本体组装时的结构示意图;
23.图6为本实用新型图1中控制杆、连杆和升降杆的立体结构示意图;
24.图7为本实用新型图6的俯视结构示意图;
25.图8为本实用新型的控制杆的结构示意图;
26.图9为本实用新型图8的俯视结构示意图。
27.图中:1关节单元本体,2控制板,3连杆,4升降杆,5摆动块, 6压板,7橡胶圈,8挡板,9控制杆;
28.101座体,102筒体,103螺栓孔,104升降槽,105通孔,106 球头部,107球形凹槽,108环形槽,109挡环,110连接槽,111安装槽;
29.201板体,202圆孔,203键槽;
30.901杆体,902花键,903把手。
具体实施方式
31.下面对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
32.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.参照图1-7,一种飞秒激光眼科近视手术用辅助关节,包括关节段和偶数根驱动线,所述关节段包括若干个依次球铰接的关节单元,所述关节单元包括关节单元本体1,所述关节单元本体1包括座体101 和筒体102,所述筒体102设置在座体101上端,所述筒体102上端设置有球头部106,所述关节单元本体1内部设置有球形凹槽107,所述球形凹槽107下部设置有环形槽108,所述球形凹槽107上端设置有螺栓孔103,所述螺栓孔103上端设置有升降槽104,所述升降槽104上端设有通孔105,所述环形槽108、球形凹槽107、螺栓孔 103、升降槽104、通孔105依次相连通,所述筒体102侧面设置有若干安装槽111,所述安装槽111通过连接槽110与升降槽104相连通,所述连接槽110中通过铰接安装有摆动块5,所述摆动块5上设置有压板6,所述螺栓孔103中装有控制板2,控制板2外壁设有螺纹,控制板2通过该螺纹与螺栓孔103相连接,所述控制板2上端通过连杆3与升降杆4连接,所述控制板2由控制杆9控制。安装槽 111与连接槽110均设有四个,且四个安装槽111等距离设置,夹角为180
°
的两个摆动块5均处于水平位置时,两个摆动块5前端之间的直线距离等于环形槽108的球径,且该两个摆动块5前端之间的连线经过球头部106的球心。
34.所述球头部106上设置有橡胶圈7。橡胶圈7的直径小于环形槽 108的球径。橡胶圈7位于摆动块5上方,橡胶圈7的直径小于环形槽108球径3-8mm。
35.所述控制板2包括板体201,所述板体201中心设置有圆孔202,所述圆孔202周边设置有若干键槽203。键槽203设有四个,且四个键槽203等角度设置。
36.参照图8-9,所述控制杆9包括杆体901,所述杆体901侧壁上设置有若干轴向延伸的花键902,所述控制杆9的花键902与控制板 2的键槽203相配合,所述杆体901末端设置有把手903。花键902 的数量与键槽203的数量一致,花键902也设有四个,且四个花键 902等角度设置。
37.所述螺栓孔103上端设置有挡环109。挡环109用于限制控制板 2上移的最高位置。所述球头部106的球径与球形凹槽107的球径一致。所述环形槽108也呈球状,所述环形槽108的球心与球形凹槽 107的球心重合,且球心位于环形槽108中,环形槽108的球径大于球形凹槽107的球径。所述球头部106与球形凹槽107配合,所述摆动块5与环形槽108配合。
38.所述座体101底部可拆卸的设置有挡板8。挡板8通过螺栓可拆卸的固定在座体101底部。
39.安装时,将第一个关节单元本体1下端的挡板8拆下,并将第二个关节单元本体1上端的球头部106插入第一个关节单元本体1的球头凹槽中,此时第二个关节单元本体1的控制板2位于螺栓孔103的最上方,摆动块5藏在安装槽111中,摆动块5藏在安装槽111中时,由于升降槽104上端设置有斜槽,摆动块5始终与竖直方向存在一定的夹角,方便了压板6与升降板的配合,使得第二个关节单元本体1 的球头部106与第一个关节单元本体1的球头凹槽
相配合,插入完成后,然后将控制杆9从第二个关节单元本体1底部插入,并使得控制杆9上的花键902插入第二个关节单元本体1的控制板2的键槽203 中,插入后使得第一个关节单元本体1与第二个关节单元本体1的中心线重合,方便了摆动块5的展开。然后通过把手903转动控制杆9,控制杆9通过花键902带着控制板2在螺栓孔103中向下移动,控制板2移动的同时,通过连杆3带着升降板向下移动,升降板下移的同时压着摆动块5上的压板6向下运动,使得摆动块5绕着铰接点摆动,最终使得升降板将压板6压在升降槽104底部,此时的摆动块5处于水平状态,摆动块5的前端为球状结构,处于水平状态时,摆动块5 前端的球状结构与环形槽108内壁相切。最后再将挡板8通过螺栓固定在座体101底部,从而将第二个关节单元本体1封锁在第一个关节单元本体1中。
40.现有技术中,为了便于球铰接中的球头与球形凹槽107相对转动,其配合间隙选取较大,同时也为了防止位于两个相邻关节单元之间的灰尘等杂质会直接进入球形铰接部位,继而会导致球头与球形凹槽107之间的接触面随着关节单元之间的相对转动而产生磨损、划伤,在关节单元的球头部106上设置阻隔环,阻隔环与环形槽108配合,以将灰尘等杂物阻挡在球铰接外侧,保护球铰接的质量,同时,由于阻隔环与环形槽108之间的接触面小,可以选取其之间的配合关系为间隙配合,继而进一步防止灰尘串入阻隔环与球形凹槽107之间。但现有的关节单元因为阻隔环的设置,使得关节单元在进行球铰接时很复杂,不易安装。本技术实施例中通过设置可以摆动展开的摆动块5方便了两个关节单元本体1的球铰接安装,并且通过关节单元本体1上的橡胶圈7,完成了现有技术中防尘的功能。
41.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1