一种剖宫产辅助结构的制作方法
1.本实用新型涉及助产设备领域,具体涉及一种剖宫产辅助结构。
背景技术:
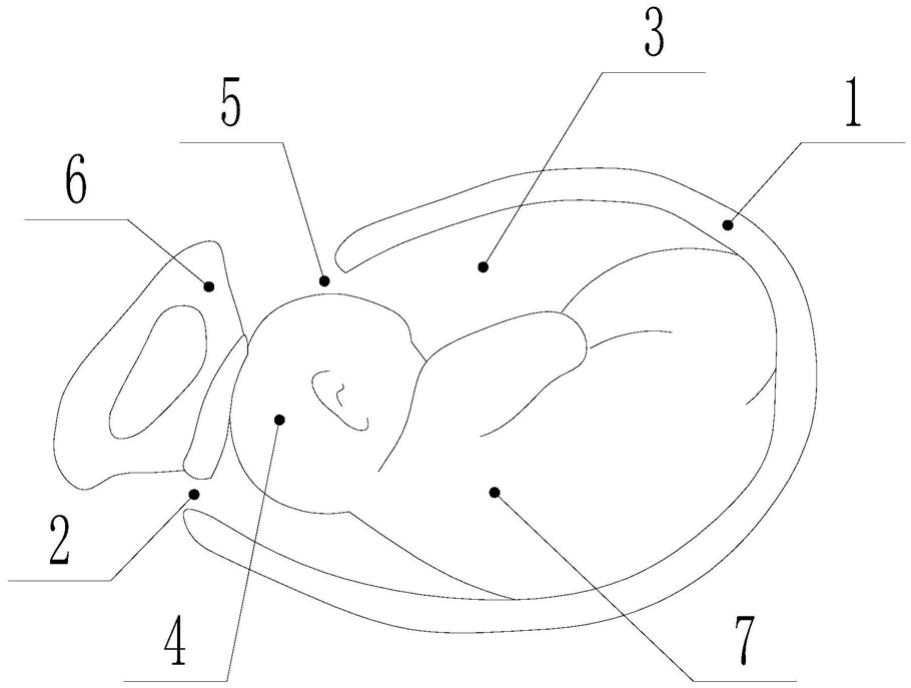
2.如图1所示,剖宫产手术的过程包括在子官下段制造切口(横切),刺破羊膜囊并将羊水清干净之后,先取出胎头4,接着取出整个胎儿7。在取出胎头4的过程中,一般都是采用手娩胎头的方法,医生的一只手(图中未示)通过横切口5伸入宫腔3中,将该手耻骨6和胎头4之间,托住胎头4;医生的另一只手按压(隔着腹部的皮肤以及脂肪组织等进行按压)子宫的远离宫口2的宫底1一侧。医生的两只手配合,将胎儿7通过横切口5从宫腔3中取出。在上述过程中,托起胎头4的一只手需要向横切口5处施力,以保证胎头4朝向横切口5处运动,在上述过程中,主要是该手的掌指关节处和近侧指间关节处对胎头4施力,掌指关节和近侧指间关节会承受较大的压力。如果手娩胎头的时间过长,手容易疲软,则会出现支撑力不足的情况,影响正常分娩过程。如果在剖宫产手术时出现了勉头困难,将胎儿7取出的过程将会耗费更长时间,为避免出现手疲软造成的支撑力不足的情况,医生会使用单叶产钳代替托起胎头4的手协助勉头,即将单叶产钳插入宫腔3中,并位于胎头4和耻骨6之间。使用时,单叶产钳以耻骨6为支点将胎头4向上托起(使用单叶产钳将胎头4向横切口5处小角度地撬起),医生用手按压宫底1,配合单叶产钳将胎头4取出。杠杆力量持久,但是使用单叶产钳容易造成胎儿7的头面部损伤。
技术实现要素:
3.本实用新型意在提供一种剖宫产辅助结构,解决了手娩胎头时由于手疲软造成的支撑力不足的技术问题。
4.为达到上述目的,本实用新型采用如下技术方案:
5.一种剖宫产辅助结构,包括手套本体和固定在手套本体上的气囊组合,所述气囊组合包括气囊,所述气囊包括掌指关节气囊和指间关节气囊。
6.本方案的使用方法、原理及优点是:在进行剖宫产手术并使用手辅助取出胎头时,医生可以佩戴剖宫产辅助结构。将手套本体戴在手上后,掌指关节气囊正好位于人手的掌指关节处(具体是食指、中指、无名指和小指的掌指关节)。在手娩胎头的过程中,掌指关节是对胎头施力的主要部位,掌指关节会承受较大的压力,所以在掌指关节处设置了掌指关节气囊。将佩戴剖宫产辅助结构的手通过横切口伸入宫腔中,托住胎头。然后向掌指关节气囊中充气,气囊变大到一定程度,掌指关节气囊对胎头形成支撑。医生的另一只手按压子宫的远离宫口的宫底一侧。医生的两只手配合,将胎儿通过横切口从宫腔中取出。气囊的增大可以辅助医生施力,避免了手容易疲软(由于手娩胎头的时间过长)的现象的产生,从而避免了出现对胎头的支撑力不足的情况,使得分娩过程顺利进行。采用本方案的剖宫产辅助结构,可以一定程度上避免使用单叶产钳等辅助结构,减少胎儿的头面部损伤。
7.其中,掌指关节是由掌骨小头与近节(第一节)指骨底构成的关节,属于球窝关节。
8.优选的,作为一种改进,所述指间关节气囊的数量为一个;当手套本体处于佩戴状态时,指间关节气囊用于覆盖食指、中指和无名指的近侧指间关节以及小指的远侧指间关节。
9.优选的,作为一种改进,所述指间关节气囊的数量为四个;当手套本体处于佩戴状态时,四个指间关节气囊分别位于人手的食指、中指和无名指的近侧指间关节处、以及小指的远侧指间关节处。
10.人手的食指、中指和无名指的近侧指间关节以及小指的远侧指间关节,均为手娩胎头时的施力部位,故在这几个部位设置了指间关节气囊,可辅助医生在剖宫产手术时,将胎儿头部抬起,从而完成将胎儿从宫腔中取出的过程。使用分指式的手套本体可采用四个指间关节气囊的形式,使用并指式的手套本体可采用单个长条状的指间关节气囊的形式。
11.其中,近侧指间关节位于第一指骨(近节)和第二指骨(中节)之间。远侧指间关节位于第二指骨(中节)和第三指骨(远节)之间。
12.优选的,作为一种改进,所述气囊组合还包括充气管;所述充气管包括用于向指间关节气囊充气的支充气管和用于向掌指关节气囊充气的总充气管。这样,通过设置充气管的方式调整气囊的大小,结构简单,易于制作。
13.优选的,作为一种改进,所述总充气管远离掌指关节气囊的一端设有单向阀。这样,可以保证气体只从外界进入气囊中,避免气囊中的气体泄漏,保证气囊对于胎头的支撑效果。
14.优选的,作为一种改进,所述支充气管的两端分别与指间关节气囊和掌指关节气囊连通。这样,通过向总充气管充气,可实现对指间关节气囊和掌指关节气囊的同时充气,比单独设置针对指间关节气囊和掌指关节气囊的充气结构,更为简单。
15.优选的,作为一种改进,所述总充气管远离掌指关节气囊的一端固定有固定带,所述固定带的两端与手套本体一体成型。这样,通过固定带将总充气管远离掌指关节气囊的一端固定在手套本体上,避免总充气管随意偏移和影响医生操作。
16.优选的,作为一种改进,所述掌指关节气囊包括第一上支撑板、第一下支撑板和第一侧壁;第一侧壁的上端和下端分别同第一上支撑板和第一下支撑板固定。上述气囊结构简单易于制作。
17.优选的,作为一种改进,所述指间关节气囊包括第二上支撑板、第二下支撑板和第二侧壁;第二侧壁的上端和下端分别同第二上支撑板和第二下支撑板固定。上述气囊结构简单易于制作。
18.优选的,作为一种改进,所述第一上支撑板用于与所述第一下支撑板接触,所述第二上支撑板用于与第二下支撑板接触;当掌指关节气囊充气时,第一上支撑板和第一下支撑板分离;当指间关节气囊充气时,第二上支撑板和第二下支撑板分离。这样,可以保证在不需要气囊辅助施力的时候,气囊处于收紧状态,便于医生进行手术操作(例如,将戴有本剖宫产辅助结构的手伸入宫腔并定位到胎头处的操作过程)。
附图说明
19.图1为现有技术的剖宫产手术的示意图。
20.图2为实施例1的剖宫产辅助结构的正视图(气囊处于充气状态)。
21.图3为实施例1的掌指关节气囊的仰视图(充气状态)。
22.图4为实施例1的指间关节气囊的仰视图(充气状态)。
23.图5为实施例1的掌指关节气囊的正视图(未充气状态)。
24.图6为实施例2的剖宫产辅助结构的正视图(气囊处于充气状态)。
25.图7为实施例2的指间关节气囊的仰视图(充气状态)。
具体实施方式
26.下面通过具体实施方式进一步详细说明:
27.说明书附图中的附图标记包括:宫底1、宫口2、宫腔3、胎头4、横切口5、耻骨6、胎儿7、手套本体8、掌指关节气囊9、指间关节气囊10、支充气管11、总充气管12、固定带13、接头端14、单向阀15、第一上支撑板16、第一下支撑板17、第一侧壁18、第一充气孔19、第二上支撑板20、第二下支撑板21、第二侧壁22、第二充气孔23。
28.实施例1
29.如图2所示,一种剖宫产辅助结构包括手套本体8和气囊组合(此处的手套本体8为现有技术中常规的分指式手套,即食指、中指、无名指和小指分别位于不同指套中),其中气囊组合包括气囊和充气管,气囊包括掌指关节气囊9和指间关节气囊10。当手套本体8戴在手上的时候(图2是以左手为例,也可以制作戴在右手上的剖宫产辅助结构,手套本体8手掌一侧朝向观察者),掌指关节气囊9的数量为一个,位于人手的四个(食指、中指、无名指和小指)掌指关节处;指间关节气囊10的数量为四个,分别位于人手的食指、中指和无名指的近侧指间关节处,以及小指的远侧指间关节处。因为在手娩胎头4时,食指、中指、无名指和小指的掌指关节、食指、中指和无名指的近侧指间关节以及小指的远侧指间关节,这几个部位是主要的对胎头4的施力部位,所以需要在这几个部位设置气囊,辅助人手对胎头4施力,从而将胎儿7通过横切口5从宫腔3中取出。
30.掌指关节气囊9和指间关节气囊10的结构参见图3和图4。掌指关节气囊9包括第一上支撑板16、第一下支撑板17和第一侧壁18。第一上支撑板16和第一下支撑板17为硬质医用塑料板,以保证对胎头4施加稳定的向横切口5托起的力,第一下支撑板17粘接固定在手套本体8上。第一上支撑板16和第一下支撑板17也可以为可以形变的医用橡胶材质的板状结构。第一侧壁18为软质的医用橡胶,掌指关节气囊9充满气的时候,第一侧壁18为上下开口的长方体,第一侧壁18的上端和下端分别同第一上支撑板16和第一下支撑板17粘接固定且形成密封连接。第一侧壁18上设有第一充气孔19和第三充气孔(图中未示)。指间关节气囊10的结构与掌指关节气囊9相似,指间关节气囊10包括第二上支撑板20、第二下支撑板21和第二侧壁22,第二侧壁22的上端和下端分别同第二上支撑板20和第二下支撑板21粘接固定且形成密封连接。第二侧壁22上设有第二充气孔23。第二上支撑板20和第二下支撑板21为硬质医用塑料板,第二侧壁22为软质的医用橡胶,第二下支撑板21粘接固定在手套本体8上。第二上支撑板20和第二下支撑板21也可以为可以形变的医用橡胶材质的板状结构。在未对掌指关节气囊9和指间关节气囊10充气时,掌指关节气囊9和指间关节气囊10中的气体被抽出,掌指关节气囊9和指间关节气囊10处于塌陷的状态,第一上支撑板16和第一下支撑板17相接触,第二上支撑板20和第二下支撑板21相接触。作为一种优化方案,图5以掌指关节气囊9为例,展示了气囊未充气的状态,指间关节气囊10的情况同掌指关节气囊9。掌指关
节气囊9未充气的时候,第一上支撑板16和第一下支撑板17通过普通双面胶粘接在一起,第一侧壁18呈塌陷状态。当充气时候,由于气压的作用,将第一上支撑板16和第一下支撑板17之间撑开。第一上支撑板16和第一下支撑板17通过普通双面胶粘接的设置,可以保证在不需要气囊辅助施力的时候,气囊处于收紧状态,便于医生进行手术操作(例如,将戴有本剖宫产辅助结构的手伸入宫腔3并定位到胎头4处的操作过程)。
31.结合图2和图5,充气管包括支充气管11和总充气管12。总充气管12的一端插入如图3所示的第一充气孔19,总充气管12与第一充气孔19粘接并密封固定。总充气管12的另一端为接头端14,用于连接现有技术的常规充气设备。接头端14处的管腔内安装有现有技术中常规的单向阀15,以保证气体只从外界进入气囊中。为了固定总充气管12,在手套本体8的开口端设有固定带13,固定带13的两端与手套本体8一体成型,总充气管12穿设并粘接固定在固定带13与手套本体8形成的环状容腔中。支充气管11的数量为四个,用于连通掌指关节气囊9和指间关节气囊10。支充气管11的一端插入如图4所示的第二充气孔23,另一端插入第三充气孔。支充气管11与第三充气孔和第二充气孔23均粘接固定并密封连接。
32.具体实施过程如下:在手娩胎头4的时候,医生一只手戴上本方案的剖宫产辅助结构,并将该手通过横切口5伸入宫腔3中,托住胎头4。使用充气设备向气囊中充气,将第一上支撑板16和第一下支撑板17之间撑开,并将第二上支撑板20和第二下支撑板21之间撑开,气囊变大到一定程度,停止充气,掌指关节气囊9和指间关节气囊10对胎头4形成支撑。医生的另一只手按压子宫的远离宫口2的宫底1一侧。医生的两只手配合,将胎儿7通过横切口5从宫腔3中取出。此过程中,如果还需要增大气囊,进而将胎头4上抬,可以由其他医生协助开启充气设备,继续向气囊中充气。
33.实施例2
34.本实施例在实施例1的基础上对方案进行改进,如图6所示,采用的手套本体8为现有技术中常规的并指式手套(即食指、中指、无名指和小指位于同一指套中)。在本实施例中,指间关节气囊10不再采用实施例1的方式,而是整体的一个长条状的指间关节气囊10。佩戴时,指间关节气囊10可覆盖食指、中指和无名指的近侧指间关节以及小指的远侧指间关节。设置一个指间关节气囊10可以只设置一根支充气管11,减少了支充气管11的数量,一定程度上减少了充气管对手术操作的影响,并使得剖宫产辅助结构的制作过程更加简单。本实施例的指间关节气囊10的结构如图7所示,指间关节气囊10包括第二上支撑板20、第二下支撑板21和第二侧壁22,第二侧壁22的上端和下端分别同第二上支撑板20和第二下支撑板21粘接且形成密封固定。第二侧壁22上设有第二充气孔23。第二上支撑板20和第二下支撑板21为软质的橡胶板(因为将手伸入宫腔3的时候,需要长条状的指间关节气囊10产生一定形变,方便将手伸入胎头4处),第二侧壁22为软质的医用橡胶,第二下支撑板21粘接固定在手套本体8上。
35.以上结合附图对本实用新型的实施方式作了详细说明,所述的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型的发明构思的前提下,还可以作出若干变形和改进,本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以对其作出各种变化。这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本发明所省略描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1