一种长度及角度可调节的膀胱自主神经探测器
1.本实用新型涉及医疗器械领域。具体而言,本实用新型涉及外科手术如宫颈癌根治术中探测神经的神经探测器。
背景技术:
2.根据美国国立癌症综合网络(nccn)的指南,宫颈癌根治术(也称为广泛全子宫切除术)及系统性的淋巴切除是治疗早期宫颈癌的标准方案。不同类型的宫颈癌根治术都需要切除一定范围的宫旁组织以实现肿瘤切除的彻底性。在宫旁组织中分布着大量盆腔自主神经,术中极易被损伤,进而导致患者术后发生膀胱、直肠及性功能障碍,其中膀胱功能障碍最为突出。文献报道,宫颈癌术后排尿困难、压力性尿失禁、急迫性尿失禁、尿频和尿急的发生率分别为36%-47%、20%-76%、8%-45%、23%和19%。这些严重影响了癌症生存者的生活质量。保留盆腔自主神经的宫颈癌根治术(nsrh)是querleu-morrow新分型(q-m分型)的c1型手术,通过保留支配膀胱的自主神经、盆腔内脏神经及腹下神经以减少患者术后功能障碍的发生率,已成为宫颈癌治疗的主流术式。
3.主要含交感神经成分的腹下神经源自t10-12发出的上腹下丛,走行于腹主动脉前方,经骶前分成两支腹下神经移行于输尿管下方,紧贴直肠系膜到达盆腔子宫动脉水平;主要为副交感神经的盆腔内脏神经起自s2-s4由骶前孔发出的分支。盆腔自主神经由腹下神经与盆腔内脏神经在子宫动脉水平交汇形成下腹下神经丛(又称为盆丛,ihp),走行于直肠前外侧,发出子宫支、直肠支、膀胱支和阴道支,分别支配子宫、直肠、膀胱、阴道和阴蒂。膀胱支经宫颈和阴道侧壁达膀胱底,是宫颈癌根治术中最容易损伤破坏的ihp分支。膀胱支从ihp的腹侧发出,分布于膀胱宫颈韧带的浅层和深层,紧邻输尿管的远端,位于膀胱中静脉和膀胱下静脉的背内侧。
4.ihp神经纤维细小,很难肉眼准确识别。术中能量器械的不当使用对神经组织可能有直接或间接的破坏,造成术后患者膀胱排尿功能障碍。因此,精准识别ihp的膀胱支是nsrh术的关键环节,借助神经探测装置是必要的。
5.muallem m z,et al.nerve sparing radical hysterectomy:short-term oncologic,surgical,and functional outcomes[j].cancers,2020,12(2):483.研究中使用isis xpert神经监测系统,包括手动引导的一次性400毫米球头刺激探头和针电极,信号放大器及操作软件neuroexplorer。膀胱内留置带有压力传感器的导尿管以反映ihp膀胱支收缩引起的膀胱内压力改变。该检测系统复杂,刺激探头及针电极无法调节长度及角度以适应nsrh手术需求。
[0006]
katahira a,et al.intraoperative electrical stimulation of the pelvic splanchnic nerves during nerve-sparing radical hysterectomy[j].gynecologic oncology,2005,98(3):462-466.研究中使用单根长手柄双极电极(直径8毫米,长40厘米)刺激ihp,通过膀胱内压力传感器观察膀胱收缩及膀胱内压力增高情况。该神经探测电极为银质,术中操作不当易损伤ihp,且无法调节长度及角度以适应宫颈癌nsrh手术需求。
[0007]
然而,现有文献报道的神经探测装置并不适合诸如nsrh这种盆腔深部手术。本领域仍然需要适合盆腔深部手术的深度及灵活度的膀胱自主神经探测器。
技术实现要素:
[0008]
本文提供一种长度及角度可调节的膀胱自主神经探测器,以适合本手术的深度及灵活度需求。本文提供的神经探测器特别适合盆腔深部手术如nsrh。
[0009]
本文提供一种长度及角度可调节的膀胱自主神经探测器,能够便于实施宫颈癌nsrh手术操作,解决在分离过程中实时探测ihp神经位置并进行功能检测,做到对支配膀胱的ihp神经支精准保留。这将有利于克服神经结构细小、识别困难问题,减小分离神经的难度,提高nsrh的手术效果。
[0010]
在一些实施方案中,本文提供了下述各项所述的神经探测器。
[0011]
1.一种神经探测器,其包括:神经探头,导电杆,导电杆长度调节元件,导电杆角度调节元件,和操作手柄,其中导电杆远端与神经探头连接,导电杆近端与操作手柄连接,所述导电杆长度调节元件与导电杆连接调节其长度,所述导电杆角度调节元件与导电杆连接调节其角度。
[0012]
2.项目1所述的神经探测器,其中导电杆包括内层导电杆和外层导电杆,形成内外双层嵌套结构,其中内层导电杆与神经探头连接,外层导电杆与操作手柄连接,所述导电杆长度调节元件包括滑动元件,所述滑动元件与内层导电杆连接,通过滑动元件使嵌套结构的内层导电杆和外层导电杆相对移动,从而调节导电杆的长度。
[0013]
3.项目2所述的神经探测器,其中内层导电杆直径为0.50-0.90cm,外层导电杆直径为0.80-1.20cm,并且内层导电杆直径小于外层导电杆直径,形成内外双层嵌套结构。
[0014]
4.项目1-3任一项所述的神经探测器,其中导电杆角度调节元件为弹性元件,所述弹性元件包括操作构件、弹簧构件和弹片构件,所述弹性元件通过弹片构件与导电杆连接,通过所述弹性元件调节导电杆的角度。
[0015]
5.项目4所述的神经探测器,其中弹性元件中的弹簧构件的压缩程度与导电杆的角度相关,通过调节压缩程度来调节导电杆的角度。
[0016]
6.项目1-5任一项所述的神经探测器,其中神经探头包括多根丝构成的毛刷状结构。
[0017]
7.项目6所述的神经探测器,其中丝的长度为0.80-1.20cm,单根丝的直径为0.08-0.12cm,丝的数目为8-10根,所述丝排列成圆形、多边形或不规则形状。
[0018]
8.项目1-7任一项所述的神经探测器,其中操作手柄采用防滑材料或手柄表面包括防滑纹或防滑颗粒。
[0019]
9.项目1-8任一项所述的神经探测器,其中神经探头和/或导电杆为导电硅胶材料。
[0020]
10.项目1-9任一项所述的神经探测器,其中操作手柄包括导线接口,通过所述导线接口与导线连接,传输来自神经探头的电信号。
[0021]
本文提供的神经探测器可以用于种膀胱自主神经探测,探头部可以为高导电硅胶材料,可以设置为毛刷状结构,在导电的同时拥有材质柔软的特点,可减少术中探测盆腔自主神经可能造成的神经损伤。
[0022]
本文提供的神经探测器长度可滑动调节,同时满足于妇科开腹及腹腔镜下宫颈癌nsrh术对神经探测器械力臂长度的需求,并适合不同体型患者的手术操作深度。
[0023]
本文提供的神经探测器头部可调节角度,以适应盆腔内解剖结构及角度变化,方便术者操作。
[0024]
本文提供的神经探测器可以配合包括探测器电流发射模块与膀胱内压力传感器信号分析模块的神经监护仪使用,操作简单,可直接获得膀胱内压力变化波形,方便术者使用及分析数据。
附图说明
[0025]
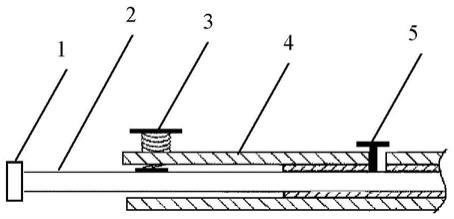
图1显示了本文公开的一种实施方式的神经探测器剖面示意图,其中:1,神经探头;2,导电杆;3,导电杆角度调节元件;4,操作手柄;5,导电杆长度调节元件。
[0026]
图2显示了本文公开的一种实施方式的神经探测器的神经探头侧面示意图,其中:11,神经探头的丝(长度可以为例如1.00cm);2,导电杆。
[0027]
图3显示了本文公开的一种实施方式的神经探测器的神经探头正面示意图,其中:11,神经探头的丝(直径可以为例如0.10cm),神经探头的丝可以排列形成正方形或圆形(其边长或直径可以为例如1.00cm)。
[0028]
图4显示了本文公开的一种实施方式的神经探测器的导电杆角度调节元件(例如弹性元件)的松弛状态示意图,其中:31,操作构件;32,弹簧构件(显示松弛状态);33,弹片构件。
[0029]
图5显示了本文公开的一种实施方式的神经探测器的导电杆角度调节元件(例如弹性元件)的压缩状态示意图,其中:31,操作构件;32,弹簧构件(显示压缩状态,虚线显示水平线,通过弹簧压缩调节导电杆角度);33,弹片构件。
[0030]
图6显示了本文公开的一种实施方式的神经探测器的导电杆长度调节元件侧面示意图,其中:21,内层导电杆;51,滑动元件;22,外层导电杆。
[0031]
图7显示了本文公开的一种实施方式的神经探测器的导电杆长度调节元件正面示意图,其中:21,内层导电杆(直径可以为例如0.80cm);51,滑动元件;22,外层导电杆(直径可以为例如1.00cm)。
[0032]
图8显示了本文公开的一种实施方式的神经探测器的操作示意图,其中:4,操作手柄;41,防滑纹;42,导线接口;6,电信号传导线;7,压力传感器信号传导线;8,神经监护仪;81,电流发射模块;82,传感器数据分析模块;9,带有压力传感器的双腔导尿管;91,压力传感元件;92,内层导尿腔,顶端有导尿孔及微缩压力传感元件,远端可连接尿袋;93,外层腔,可注水,固定尿管于膀胱内;94,尿袋连接口。
具体实施方式
[0033]
下文结合附图对本文的示例性实施方案进行了描述。本领域技术人员将理解应理解可以所述探测器进行修改,而不违背本文公开的精神和范围。因此,本文附图和详细描述仅是示例性而非限制性的。在一些附图和示例中,没有详细显示本领域技术人员熟知的结构,以便能够清楚简要的对相应实施方式进行描述。然而,应当理解,本技术涵盖能够实现相应功能的各种实施方式。
[0034]
在一些实施方案中,本文提供一种神经探测器,其包括:神经探头1,导电杆2,导电杆长度调节元件5,导电杆角度调节元件3,和操作手柄4,其中导电杆2远端与神经探头1连接,导电杆近端与操作手柄4连接,所述导电杆长度调节元件5与导电杆连接调节其长度,所述导电杆角度调节元件3与导电杆连接调节其角度。在一些实施方案中,神经探测器中的导电杆2可以包括内层导电杆21和外层导电杆22,形成内外双层嵌套结构,其中内层导电杆21与神经探头1连接,外层导电杆22与操作手柄4连接,所述导电杆长度调节元件5可以包括滑动元件51,所述滑动元件与内层导电杆21连接,通过滑动元件使嵌套结构的内层导电杆21和外层导电杆22相对移动,从而调节导电杆2的长度。在一些实施方案中,滑动元件51可以包括任何适当的构件,例如包括通过自卷式齿轮连接到内层导电杆的可牵拉线,通过拉线的传动使得内层导电杆和外层导电杆相对移动。在一些实施方案中,神经探测器中的内层导电杆21直径可以为0.50-0.90cm(例如0.50cm、0.60cm、0.70cm、0.80cm、0.90cm或任何其间的范围,例如0.85cm),外层导电杆直径22可以为0.80-1.20cm(例如0.80cm、0.90cm、1.00cm、1.10cm、1.20cm或任何其间的范围,例如1.05cm),并且其中内层导电杆直径小于外层导电杆直径,形成内外双层嵌套结构。在一些实施方案中,神经探测器中的导电杆可以采用其它方式调节长度,例如可以包括远端部分(与神经探头连接)和近端部分(与操作手柄连接),远端部分和近端部分之间通过弹性构件连接,从而通过弹性构件的压缩调节导电杆的总长度。当采用弹性构件连接导电杆的远端部分和近端部分时,远端部分和近端部分的直径不受限制,可以为远端部分的直径大于、等于或小于近端部分的直径;导电杆长度调节元件可以包括滑动元件,所述滑动元件可以与导电杆的远端部分连接,通过滑动元件使远端部分和近端部分之间的弹性构件的压缩和松弛,从而调节导电杆的长度。在一些实施方案中,神经探测器中的导电杆角度调节元件3可以为弹性元件,所述弹性元件包括操作构件31、弹簧构件32和弹片构件33,所述弹性元件通过弹片构件与导电杆连接,通过所述弹性元件调节导电杆的角度。在一些实施方案中,弹簧构件32和弹片构件33之间可以直接连接或通过传动机构间接连接。在一些实施方案中,可以采用本领域已知的任何适当方式通过弹性元件调节调节导电杆角度。在一些实施方案中,弹性元件中的弹簧构件的压缩程度与导电杆的角度相关,通过调节压缩程度来调节导电杆的角度。在一些实施方案中,神经探头包括多根丝11构成的毛刷状结构。在一些实施方案中,毛刷状结构中的丝的长度可以为0.80-1.20cm(例如0.80cm、0.90cm、1.00cm、1.10cm、1.20cm或任何其间的范围,例如1.05cm),单根丝的直径可以为0.8-1.2mm(例如0.80mm、0.90mm、1.00mm、1.10mm、1.20mm或任何其间的范围,例如1.05mm),丝的数目可以为8-10根(例如8、9、10根),所述丝排列成圆形、多边形或不规则形状。在一些实施方案中,神经探测器的操作手柄4表面包括防滑纹41或防滑颗粒。在一些实施方案中,神经探头和/或导电杆可以为导电硅胶材料。在一些实施方案中,操作手柄4包括导线接口42,通过所述导线接口与导线连接6,传输来自神经探头的电信号。
[0035]
在一些实施方案中,神经探头,导电杆和操作手柄可以采用本领域已知的任何适当结构或材料。例如,神经探头的形状没有任何限制,可以采用球形,柱形、环形、扁平型、勺型、钩形、棱形、针形等。在神经探头设置毛刷结构时,毛刷同样可以形成球形,柱形、环形、扁平型、勺型、钩形、棱形、针形等形状。在形成上述形状时,可以调节构成毛刷的各部分丝的长度,使得形成平面、凸面或凹面的探头与组织接触面,以适合灵活探测组织中的神经。在一些实施方案中,导电杆可以采用中间导线而外层为刚性材料的形式,只要能够传导电
信号并具有一定刚性即可。在一些实施方案中,操作手柄可以形成为适合操作的形状和尺寸,也可以采用防滑材料、设置防滑螺纹和/或颗粒,从而适合灵活操作。在一些实施方案中,操作手柄上还可以设置操作开关或控制电路装置。
[0036]
在一些实施方案中,本文提供长度及角度可调节的神经探测器,其中探头部分采用高导电硅胶材料,同时满足导电及柔性,探头由多根硅胶丝构成毛刷状结构,长1.00cm,总直径1.00cm,单根硅胶丝直径0.10cm,探头以外的导电硅胶杆外层有绝缘涂层,远端与手柄相连。硅胶杆呈内外双层嵌套结构,外层直径1.00cm,内层直径0.80cm,嵌套结构连接滑动元件,可外推或内收内层硅胶杆,达到调节硅胶杆长度的目的。内层硅胶杆接触性连接弹性元件,当弹簧呈放松状态时,硅胶杆及硅胶头呈水平状态,当弹簧向下压缩时,压缩元件远端的金属弹片相应地向下压缩硅胶杆,因手柄端固定,则硅胶探头端可呈角,角度与弹簧压缩程度呈正相关,达到调节角度的目的。手柄表面有螺纹,起到防滑作用,手柄与导线相连,可传输电流刺激信号。在一些实施方案中,本文提及的连接可以为固定连接或柔性连接。
[0037]
在一些实施方案中,本文提供的神经探头可以与带有压力传感器的双腔尿管9联合使用。尿管材质可以为橡胶,外层腔含有可充盈球囊,当把导尿管插入患者膀胱后,向外层腔93内注射生理盐水6-8ml可固定尿管,防止脱落。内层腔92顶端有微型传感器91,可感受膀胱内压力变化,将信号传输至神经监护仪分析模块,内层腔顶端另有小孔,可将尿液通过尿袋连接口94引流至尿袋中。在一些实施方案中,本文提供的神经探头可以进一步与神经监护仪8联合使用。神经监护仪可以含有电流发射模块81及数据分析模块82。电流发射模块可通过导线向神经探测器发射刺激电流及脉冲,数据分析模块可回收由膀胱内的压力传感器传输回的压力变化信号,分析形成波形。
[0038]
本文提供的神经探测器可以如下操作。患者麻醉后,将头端带有压力传感器的双腔导尿管置入膀胱,向外层腔注入生理盐水8ml,固定尿管,内层腔向外连接尿袋,连接传感器信号传导线7至神经监护仪模块。将神经探测器电信号传导线6连接至神经监护仪模块。
[0039]
进行nsrh手术,解剖出盆腔自主神经及各分支,术中使用此神经探测器识别其中的膀胱支,并进行精准保留。具体而言:当盆腔自主神经及各分支分离后,拆除尿袋,向膀胱内注射温生理盐水400ml,使膀胱充盈,夹闭尿管。打开神经监护仪,发射电信号:30ma,10s,10hz单相短阵脉冲,持续1ms。选择切除子宫前、后两个时相分别用神经探测器的头端轻扫双侧ihp起始段及膀胱支,观察神经监护仪模块所显示的膀胱内压力变化曲线,记录数据并分析。术中可以根据需要适当调节探测器长度及角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1