便携式手功能康复机器人
1.本实用新型涉及医疗器械的技术领域,特别是涉及一种便携式手功能康复机器人。
背景技术:
2.手是人类进化的产物,也是创造世界文明的特殊劳动工具,无论在工作或是日常生活中,我们的双手都起着重要的感知、活动、握持、操控等作用。正因如此,手功能障碍病人益增多。
3.目前我国手外科治疗的技术也趋于成熟,然而大多数医院仅局限于自身水平及条件所限,治疗上停留于“消灭创面、组织修复、功能重建”,对于手功能康复治疗,大多只是嘱咐“注意功能锻炼”或指导必要的康复训练。其实,目前在世界上,包括手功能康复治疗在内的康复医学已得到广泛的重视,已提升至与临床、保健、预防同等重要的地位。
4.欧美国家自60年代后期开始强调手功能康复的重要性,并有专门从事手治疗的理疗师及作业治疗师,由于康复治疗的早期介入,手功能障碍病人的手术效果和功能恢复有了明显的提高,取得了巨大的经济效益和社会效益。因此,手功能障碍后,从组织愈合到功能恢复,从职业训练到重返社会,都需要康复治疗。
5.现在有一些手功能康复装置,大多数为机械式的,瞬间冲击载荷大,重量大,安全性差,同时重量大不便携带。气动式软体手套可有效避免患者手部二次受伤;现有的气动式软体手套只能对所有的手指进行康复运动,不能根据人们手部的偏瘫情况进行针对性的康复训练;现有的气动式软体手套只能根据气泵设置的固有频率进行训练,不能结合人们手部的训练情况随心所欲地改变训练节奏。
技术实现要素:
6.本实用新型的目的是为了解决上述问题,提供一种便携式手功能康复机器人。
7.本实用新型的技术方案是:一种便携式手功能康复机器人,包括气泵、患侧手套;患侧手套包括患侧手套本体、柔性伸缩管及固定柔性伸缩管的固定座、扭动阀门、汇总块、螺旋软管;其特征在于,气泵为扇形块,内置泵体,侧面设有与螺旋软管配套的患侧手气接口;
8.患侧手套本体手背面,食指、中指、无名指、小拇指的近端指骨、中节指骨、远端指骨处均设有一截柔性伸缩管;拇指的近端指骨、远端指骨处两侧均对称设有一截柔性伸缩管;从远端指骨向近端指骨的柔性伸缩管依次相连;柔性伸缩软管的尾部通过气管甲分别与患侧手套本体手背相对应的手腕上的扭动阀门相连;拇指上的柔性伸缩管通过y形连接管与扭动阀门相连;扭动阀门通过气管乙与汇总块前端相连;汇总块末端通过螺旋软管与气泵相连;汇总块内部为空腔;
9.患侧手套本体手心面,食指、中指、无名指、小拇指的远端指骨和中节指骨处设有手指套;手指套和患侧手套本体拇指处均设有侧开缝;拇指处的侧开缝朝向内侧虎口;侧开
缝单边固定有横向的束缚带;束缚带的两面分别附着有相互配合的魔术贴庚、魔术贴辛;拇指上的束缚带设于近端指骨处;食指、中指、无名指、小拇指上的束缚带设于中节指骨处;患侧手套本体大、小鱼际之间设有缺口;患侧手套本体于大鱼际向手腕延伸部位上设有魔术贴甲;患侧手套本体于小鱼际向手腕延伸部位下部设有与魔术贴甲相匹配的魔术贴乙,上部设有魔术贴丙;
10.患侧手套本体手背面虎口处固定有加固带;加固带另一顿绕过虎口通过魔术贴丁与魔术贴丙相配合。
11.优选的,气泵前端设有开关键。
12.优选的,气泵前端设有充电口;充电口连接气泵内部的锂电池。
13.优选的,气泵前端设有健康手接口。
14.优选的,还包括健康手套;健康手套包括健康手套本体、四按钮开关;
15.健康手套本体手心面中心设有鼓包;鼓包一侧开口,塞入四按钮开关;
16.健康手套本体手背面,大、小鱼际之间设有缺口;健康手套于大鱼际向手腕延伸部位上设有魔术贴戊;健康手套本体于小鱼际向手腕延伸部位下部设有与魔术贴戊相匹配的魔术贴己;
17.四按钮开关通过电线与健康手接口相连。
18.优选的,气泵顶面设有控制触摸屏。
19.本实用新型的有益效果是:本实用新型的便携式手功能康复机器人,包括患侧手套、气泵、健康手套;患侧手套上设有柔性伸缩管;柔性伸缩管通过扭动阀门、螺旋软管与气泵相连;健康手套手心处设有四按钮开关,对应着健康手的食指、中指、无名指、小拇指;对应的手指按下或松开四按钮开关,向气泵传递或切断信息,以控制患侧手套上的柔性伸缩管的进气或排气,进而控制患侧手套的工作状态;人们可以自主地通过四按钮开关随心所欲地改变训练节奏。增设控制触摸屏后可以设置气泵每次的工作时长和上、下次工作间隔;扭动阀门对应控制患侧手套的拇指、食指、中指、无名指、小拇指上的柔性伸缩管的气路通断;针对手部的偏瘫情况可以设置扭动阀门的不同状态,来进行针对性的康复训练。
附图说明
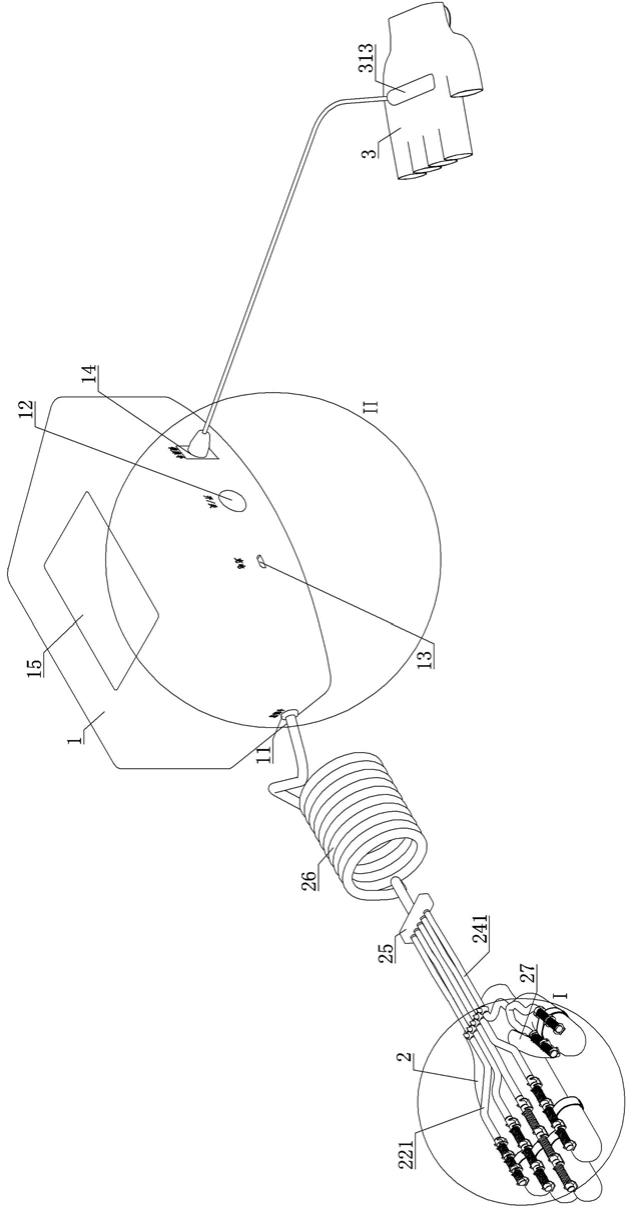
20.图1是本实用新型便携式手功能康复机器人的结构示意图;
21.图2是图1的i放大视图;
22.图3是图1的ii放大视图;
23.图4是本实用新型便携式手功能康复机器人患侧手套的结构示意图;
24.图5是图4的仰视图;
25.图6是图5的a
‑
a截面图;
26.图7是图5的b
‑
b截面图;
27.图8是本实用新型便携式手功能康复机器人健康手套的仰视图;
28.图9是图8的c
‑
c截面图;
29.图10是本实用新型便携式手功能康复机器人健康手套的俯视局部剖视图;
30.图11是本实用新型实施例一的电路原理图;
31.图中:1.气泵、11.患侧手气接口、12.开关键、13.充电口、14.健康手接口、15.控制
触摸屏、2.患侧手套、21.患侧手套本体、211.手指套、2111.侧开缝、2112.束缚带、2113.魔术贴庚、2114.魔术贴辛、2115.束缚带、212.魔术贴甲、213.魔术贴乙、214.魔术贴丙、22.柔性伸缩管、221.气管甲、222.y形连接管、23.固定座、24.扭动阀门、241.气管乙、25.汇总块、26.螺旋软管、27.加固带、271.魔术带丁、3.健康手套、31.健康手套本体、311.魔术贴戊、312.魔术贴己、313.鼓包、32.四按钮开关、321.电线。
具体实施方式
32.实施例一:参见图1
‑
11,一种便携式手功能康复机器人,包括气泵、患侧手套;气泵为患侧手套提供动力源;患侧手套包括患侧手套本体、柔性伸缩管及固定柔性伸缩管的固定座、扭动阀门、汇总块、螺旋软管;气泵为扇形块,内置泵体,侧面设有与螺旋软管配套的患侧手气接口;气泵通过患侧手气接口与螺旋软管配合为患侧手套提供气源;螺旋软管可根据需要拉伸以调整患侧手套到气泵的距离,使患侧手套更加自由;柔性伸缩管根据是否得到气源而改变固定座之间的距离;
33.患侧手套本体手背面,食指、中指、无名指、小拇指的近端指骨、中节指骨、远端指骨处均设有一截柔性伸缩管;柔性伸缩管通气,固定座之间距离变大,借助手指上的关节,使手指完成曲指动作;柔性伸缩管泄气,手部恢复原始状态,完成展指动作;拇指的近端指骨、远端指骨处两侧均对称设有一截柔性伸缩管;拇指上设置的柔性伸缩管共计四截,其他任一手指都只有三截;拇指几乎参与全部的手部运动,而对于偏瘫的病人来说,他们手部的张力高,拇指的硬度也会比较大,需要更多的动力驱动才能弯曲;从远端指骨向近端指骨的柔性伸缩管依次相连;柔性伸缩软管的尾部通过气管甲分别与患侧手套本体手背相对应的手腕上的扭动阀门相连;拇指上的柔性伸缩管通过y形连接管与扭动阀门相连;扭动阀门可以控制所连接的手指上的柔性伸缩管是否通有气体;扭动阀门通过气管乙与汇总块前端相连;汇总块末端通过螺旋软管与气泵相连;汇总块内部为空腔;
34.患侧手套本体手心面,食指、中指、无名指、小拇指的远端指骨和中节指骨处设有手指套,用以束缚患者远端指骨和中节指骨;手指套和患侧手套本体拇指处均设有侧开缝;拇指处的侧开缝朝向内侧虎口;通过侧开缝可以把患者的五根手指相对应地放入患侧手套本体内;侧开缝单边固定有横向的束缚带;束缚带的两面分别附着有相互配合的魔术贴庚、魔术贴辛;束缚带可以从柔性伸缩管与患侧手套本体之间的缝隙穿过,绕着手指缠绕一周,束缚带通过魔术贴庚、魔术贴辛相互配合,进行固定;不同患者的患侧手手指粗细亦不相同,束缚带可以通过调整束缚带末端的位置进行适应性调整;束缚带末端拇指上的束缚带设于近端指骨处;食指、中指、无名指、小拇指上的束缚带设于中节指骨处;束缚带对各个手指进行束缚,使患侧手套便利稳定地套在患侧手上;患侧手套本体大、小鱼际之间设有缺口;患侧手套本体于大鱼际向手腕延伸部位上设有魔术贴甲;患侧手套本体于小鱼际向手腕延伸部位下部设有与魔术贴甲相匹配的魔术贴乙,上部设有魔术贴丙;魔术贴甲、乙相配合,束缚住手腕部;
35.患侧手套本体手背面虎口处固定有加固带;加固带另一顿绕过虎口通过魔术贴丁与魔术贴丙相配合;魔术贴丁、丙相配合,通过加固带束缚手心位置。
36.气泵前端设有开关键,用以开启或关闭整个康复机器人的电路。
37.气泵前端设有充电口;充电口连接气泵内部的锂电池;通过充电口为锂电池充电,
单次满电可工作5小时,使本实用新型能够不依赖外部电源也能工作,增加便携性。
38.便携式手功能康复机器人还包括健康手套;健康手套包括健康手套本体、四按钮开关;
39.气泵前端设有健康手接口;
40.健康手套本体手心面中心设有鼓包;鼓包一侧开口,塞入四按钮开关;四按钮开关分别对应的食指、中指、无名指、小拇指;握拳时四根指头对应按下相应按钮;
41.健康手套本体手背面,大、小鱼际之间设有缺口;健康手套于大鱼际向手腕延伸部位上设有魔术贴戊;健康手套本体于小鱼际向手腕延伸部位下部设有与魔术贴戊相匹配的魔术贴己;魔术贴戊、己相互配合束缚腕部;
42.四按钮开关通过电线与健康手接口相连,以把按钮的开断信息传递到气泵内部。
43.患侧手套、健康手套与气泵可被归纳到同一个袋子里,便于携带,这样患者在户外也可以完成手指的曲展训练。
44.实施例一的使用过程:
45.准备过程,患侧手套入患侧手套,健康手套入健康手套内,按下开关键;
46.揭开魔术贴丁、魔术贴乙,拉平束缚带,通过侧开缝把患侧手套入患侧手套内,拇指、食指、中指、无名指、小拇指对应套入相应的手指套内,患侧手腕部也套入患侧手套内部;束缚带从柔性伸缩管与患侧手套本体之间的缝隙穿过,缠绕手指一周,通过魔术贴庚、魔术贴辛进行固定,然后使魔术贴甲、乙相互粘连,再把加固带绕过虎口,跨过患侧手手心,使魔术贴丙、丁相互粘连;患侧手完全套入患侧手套内;
47.揭开魔术贴己,把健康手套入健康手套内,患侧手腕部也套入患侧手套内部;魔术贴戊、己相互配合束缚腕部;
48.患侧手套进行主动模式工作,
49.健康手弯曲,食指、中指、无名指、小拇指弯曲按下手心处的四按钮开关;四按钮开关通过电线向气泵内传递握拳信号,四个按钮开关中的任一一个接通,气泵内的泵体启动;气泵内的泵体输出的气流通过患侧手气接口、螺旋软管向汇总块输送,汇总块内部为空腔;汇总块再把该股气流分流,分别通过各个手指相对应的扭动阀门流向各个手指上方的柔性伸缩管内,使柔性伸缩管开始伸张;由于架设柔性伸缩管的固定座与患侧手手套相互固定,而柔性伸缩管强迫固定座相互远离,患侧手手套只能借助患者患侧手上对应的指关节转动,以适应柔性伸缩管的伸张;而指关节的转动即为实质意义上的患侧手弯曲动作;
50.健康手伸展,食指、中指、无名指、小拇指伸直离开手心处的四按钮开关;四按钮开关通过电线传递的握拳信号被隔断,气泵进行排气;柔性伸缩管内充满的气体形成反向气流,沿着健康手弯曲时进入柔性伸缩管的通道,返回气泵内的泵体处;由于柔性伸缩软管内的气体被抽离,柔性伸缩软管收缩,固定座相互靠近,患侧手套借助患者指关节反向转动,以适应柔性伸缩管的收缩;指关节的反向转动只能转动到各个手指伸直为止,患侧手完成伸直动作;
51.通过四指按下或离开四按钮开关,进而使患侧手反复切换握拳、伸展两种状态,以进行康复训练。
52.调整患侧手套对应的手指,
53.根据患侧手各个手指的状态不一样,可以通过开闭相应的扭动阀门来控制相应的
手指上的柔性伸缩管的气路,进而控制该手指是否进行弯曲伸直动作。
54.为了实现实施例一的工作过程,提供一幅继电器电路图,该电路图用于实施例一的工作过程的实现,其他能够满足上述工作过程电路也可以用于实施例一中。
55.如图11所示,按下开关键后,按下四按钮开关,使继电器km1形成通路,常开开关km1闭合,常闭开关km1断开;常开开关km1的闭合使继电器km2形成通路;常开开关km2闭合使继电器km2自锁,同时开启了通往气泵泵体的电路;锂电池的正极通过继电器km1的常开开关连接气泵泵体的正极,锂电池的负极通过继电器km1的常开开关连接气泵泵体的负极,气泵正转,向柔性伸缩软管内输送气流;随后松开四按钮开关,继电器km1断电,继电器km1的常闭开关关闭,常开开关打开,锂电池的正极通过继电器km1的常闭开关连接气泵泵体的负极,锂电池的负极通过继电器km1的常闭开关连接气泵泵体的正极,气泵反转,抽取柔性伸缩软管内的气体。
56.实施例二:参见图1
‑
7,实施例二与实施例一基本相同,相同之处不再赘述,不同之处是:气泵顶面设有控制触摸屏,气泵内设有与控制触摸屏连接的控制电路板,用以控制气泵的上、下次工作间隔和每次工作的时长,以控制患侧手套每次弯曲的时长和上下次的间隔。
57.实施例二的工作过程:
58.准备过程,
59.通过控制触摸屏设定患侧手套每次弯曲的时长和上下次的间隔;患侧手如实施例一患侧手套入患侧手套内,按下开关键;
60.患侧手套进行被动模式工作,
61.通过控制触摸屏开启气泵,气泵按照之前设置的每次弯曲的时长和上、下次的间隔,阶段性地为柔性伸缩管供气;供气时,固定柔性伸缩管的固定座相互远离,再借助患侧手上的指关节,使手指完成弯曲;抽气时,由于患侧手的原始状态为僵硬的展直状态,手指自动恢复,使手指完成展直状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1