一种治疗头可旋转手术电极的制作方法
1.本实用新型属于医疗器械技术领域,具体涉及一种治疗头可旋转手术电极。
背景技术:
2.微创手术相对传统手术有较大优势,具有创口小,出血少,恢复快的特点。手术电极作为微创手术的一种重要手术器械,应用广泛,手术电极通过治疗头实现对组织的消融、切割、电凝等效果,能够在狭小空间内实现手术操作,治疗头有很大一部分是有工作面方向,不是“杆”端面,而是“杆”的侧面。这样围绕目标组织治疗时,就需要操作者通过旋转手柄而实现治疗头旋转,非常不便;尤其是手术电极后端带吸引管、注水管及电源线的情况下,需要克服一定的扭矩阻力。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供了一种治疗头可旋转手术电极,解决了现有技术中存在的问题。
4.为了解决技术问题,本实用新型的技术方案是:一种治疗头可旋转手术电极,包括治疗头、外杆、芯杆和手柄,手柄包括手柄外壳、控制模块和驱动模块,所述驱动模块设置于手柄外壳内部,控制模块设置于手柄外壳一侧面,控制模块与驱动模块电连接,所述外杆同轴套装于芯杆外侧,芯杆一端连接治疗头,芯杆另一端穿过手柄外壳与驱动模块啮合,所述外杆一端与治疗头密封相接,外杆另一端与手柄外壳固定连接。
5.优选的,所述驱动模块包括驱动电机和齿轮,驱动电机通过支架固定于手柄外壳内部,驱动电机与控制模块电连接,所述驱动电机输出端连接齿轮,齿轮与芯杆啮合。
6.优选的,所述芯杆穿过手柄外壳的一端周向设置有啮合齿,啮合齿与齿轮相啮合。
7.优选的,所述手柄外壳为圆柱形结构,控制模块固定于手柄外壳周向并且靠近手柄外壳尾部。
8.优选的,所述外杆和治疗头相接处设置有密封环。
9.优选的,所述外杆和芯杆之间设置有高分子润滑膜。
10.优选的,所述芯杆一端与治疗头焊接,芯杆另一端与手柄外壳焊接。
11.优选的,所述控制模块为plc控制组件,控制模块外接电源。
12.与现有技术相比,本实用新型的优点在于:
13.(1)本实用新型公开了一种治疗头可旋转手术电极,通过控制模块控制驱动电机,驱动电机带动齿轮,齿轮与芯杆端部周边啮合,从而驱动芯杆转动,芯杆带动治疗头转动,实现治疗面的360度可调,本实用新型没有扭矩阻力,使用便捷,治疗效果好;
14.(2)本实用新型利用非人力驱动芯杆旋转,外杆不旋转,芯杆带动治疗头旋转,自动控制程度高,操作方便;
15.(3)本实用新型外杆和芯杆之间设置有高分子润滑膜,利用高分子润滑膜进行润滑,以及隔离绝缘,并且设置密封环,提高整体密封程度。
附图说明
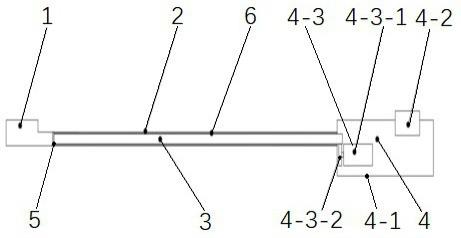
16.图1、本实用新型一种治疗头可旋转手术电极的剖面结构示意图。
17.附图标记说明:
18.1、治疗头,2、外杆,3、芯杆,4、手柄,5、密封环,6、高分子润滑膜;
[0019]4‑
1、手柄外壳,4
‑
2、控制模块,4
‑
3、驱动模块;
[0020]4‑3‑
1、驱动电机,4
‑3‑
2、齿轮。
具体实施方式
[0021]
下面结合实施例描述本实用新型具体实施方式:
[0022]
需要说明的是,本说明书所示意的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
[0023]
同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0024]
实施例1
[0025]
如图1所示,本实用新型公开了一种治疗头可旋转手术电极,包括治疗头1、外杆2、芯杆3和手柄4,手柄4包括手柄外壳4
‑
1、控制模块4
‑
2和驱动模块4
‑
3,所述驱动模块4
‑
3设置于手柄外壳4
‑
1内部,控制模块4
‑
2设置于手柄外壳4
‑
1一侧面,控制模块4
‑
2与驱动模块4
‑
3电连接,所述外杆2同轴套装于芯杆3外侧,芯杆3一端连接治疗头1,芯杆3另一端穿过手柄外壳4
‑
1与驱动模块4
‑
3啮合,所述外杆2一端与治疗头1密封相接,外杆2另一端与手柄外壳4
‑
1固定连接。
[0026]
实施例2
[0027]
优选的,如图1所示,所述驱动模块4
‑
3包括驱动电机4
‑3‑
1和齿轮4
‑3‑
2,驱动电机4
‑3‑
1通过支架固定于手柄外壳4
‑
1内部,驱动电机4
‑3‑
1与控制模块4
‑
2电连接,所述驱动电机4
‑3‑
1输出端连接齿轮4
‑3‑
2,齿轮4
‑3‑
2与芯杆3啮合。
[0028]
优选的,所述芯杆3穿过手柄外壳4
‑
1的一端周向设置有啮合齿,啮合齿与齿轮4
‑3‑
2相啮合。
[0029]
所述芯杆3端部的啮合齿与齿轮4
‑3‑
2的齿数比例可以根据需要进行调整。
[0030]
所述驱动模块4
‑
3也可为气动驱动。
[0031]
实施例3
[0032]
优选的,如图1所示,所述手柄外壳4
‑
1为圆柱形结构,控制模块4
‑
2固定于手柄外壳4
‑
1周向并且靠近手柄外壳4
‑
1尾部,便于观察转动角度。
[0033]
优选的,所述控制模块4
‑
2为plc控制组件,控制模块4
‑
2外接电源。
[0034]
所述手柄外壳4
‑
1也可为其他形状,控制模块4
‑
2也可设置于手柄外壳4
‑
1尾部端面。
[0035]
实施例4
[0036]
优选的,如图1所示,所述外杆2和治疗头1相接处设置有密封环5。
[0037]
设置密封环5用于外杆2和治疗头1之间的密封。
[0038]
优选的,如图1所示,所述外杆2和芯杆3之间设置有高分子润滑膜6。
[0039]
利用高分子润滑膜进行润滑,以及隔离绝缘。
[0040]
本实用新型各接口处用胶水或硅胶密封,提高整体密封程度。
[0041]
实施例5
[0042]
优选的,所述芯杆3一端与治疗头1焊接,芯杆3另一端与手柄外壳4
‑
1焊接。
[0043]
本实用新型的工作原理如下:
[0044]
本实用新型公开了一种治疗头可旋转手术电极,控制模块4
‑
2控制驱动电机4
‑3‑
1转动,驱动电机4
‑3‑
1带动齿轮4
‑3‑
2,齿轮4
‑3‑
2带动芯杆3旋转,芯杆3带动治疗头1旋转,从而实现治疗头360旋转,在不需要旋转手柄4的情况下实现作用面的改变,提高手术效率,降低操作者工作强度,缩短手术时间;本实用新型没有扭矩阻力,使用便捷,治疗效果好。
[0045]
本实用新型利用非人力驱动芯杆旋转,外杆不旋转,芯杆带动治疗头旋转,自动控制程度高,操作方便。
[0046]
本实用新型外杆和芯杆之间设置有高分子润滑膜,利用高分子润滑膜进行润滑,以及隔离绝缘,并且设置密封环,提高整体密封程度。
[0047]
上面对本实用新型优选实施方式作了详细说明,但是本实用新型不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
[0048]
不脱离本实用新型的构思和范围可以做出许多其他改变和改型。应当理解,本实用新型不限于特定的实施方式,本实用新型的范围由所附权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1