智能助行器
1.本实用新型涉及助行器领域,具体是一种智能助行器。
背景技术:
2.助行器是辅助支撑人体、保持人体平衡和辅助人体行走的器具。
3.在针对病患的下肢功能恢复训练中,经常使用助行器,病患通常需要双手握持助行器而获得助行器的支撑力;病患从站立状态转变为移动状态的过程中,应当首先做出移动助行器的动作,待助行器再次稳定的设置于地面之后,再通过助行器的支撑力支撑住身体并向前迈步。
4.病患通过助行器进行下肢功能恢复训练的过程中,可能由多种原因导致病患的摔倒情况发生,其中一种情况是:助行器被病患移动的距离过大,导致病患的身体重心失衡,从而产生病患在重心失衡的情况下摔倒。虽然可以通过医护人员的目测而限制病患移动助行器的距离,但在脱离医护人员的情况下,病患通过助行器自行做出下肢功能恢复训练而产生摔倒的几率大大增加,其根本原因是,现有技术中的助行器无法获得被移动的距离,从而无法通过报警的方式提示病患。
5.因此,现有技术中,如何获得助行器的被移动的距离,成为要解决的技术问题。
技术实现要素:
6.为解决现有技术中,如何获得助行器的被移动的距离的技术问题,本实用新型提供智能助行器。
7.为实现上述目的,本实用新型采取的技术方案为:
8.根据本实用新型的一个方面,提供智能助行器,包括框架、控制器、卷筒机构、绳状部件和第一传感器;
9.所述控制器、所述卷筒机构和所述第一传感器可分别设置于所述框架上,其中,所述绳状部件可被卷绕在所述卷筒机构上,所述绳状部件的一端可被牵拉,所述第一传感器可被所述卷筒机构驱动,且所述第一传感器与所述控制器可电性连接;
10.所述控制器至少用于通过所述第一传感器获取被牵拉的所述绳状部件的长度变化量。
11.进一步的,还包括多个第二传感器;
12.任一个所述第二传感器分别设置于所述框架,其中,任一个所述第二传感器可分别且可同时被同一个平面挤压,且相邻的两个所述第二传感器之间的间距满足第一预设间距;
13.任一个所述第二传感器分别与所述控制器电性连接,其中,所述控制器可同时获得任一个所述第二传感器的反馈信号。
14.进一步的,还包括至少两个第三传感器;
15.任一个所述第三传感器分别设置于所述框架,其中,相邻的两个第三传感器之间
的间距满足第二预设间距;
16.任一个所述第三传感器分别与所述控制器电性连接,其中,所述控制器用于判断接收到的任一个所述第三传感器的反馈信号是否满足第一预设条件。
17.进一步的,还包括两个第四传感器;
18.所述框架的其中两处位置分别被设置为抓握部,其中,任一个所述第四传感器分别被设置在其中一个所述抓握部处;
19.任一个所述第四传感器分别与所述控制器电性连接,其中,所述控制器用于判断接收到的任一个所述第四传感器的反馈信号是否满足第二预设条件。
20.进一步的,所述第一传感器具体为如下之一:光电编码器、霍尔编码器和机械编码器。
21.进一步的,所述第二传感器具体为压力传感器。
22.进一步的,所述第三传感器具体为包括发射器和接收器的光电传感器。
23.进一步的,所述第四传感器具体为温度传感器或压力传感器。
24.进一步的,还包括报警装置;
25.所述报警装置设置于所述框架,所述报警装置与所述控制器电性连接,其中,所述控制器至少用于根据所述绳状部件的长度变化量触发所述报警装置。
26.进一步的,还包括安全带;
27.所述安全带可连接于所述框架。
28.上述技术方案具有如下优点或者有益效果:
29.本实用新型提供的智能助行器,绳状部件可被连接于病患的身体上,当病患移动智能助行器时,绳状部件可驱动卷筒机构发生转动,被卷筒机构驱动的第一传感器可产生第一电信号,控制器可接收第一电信号,且控制器可判断当前卷筒是否为顺时针转动或逆时针转动,并能够获得绳状部件被拉伸的长度;绳状部件被拉伸的长度可代表智能助行器被移动的间距。
附图说明
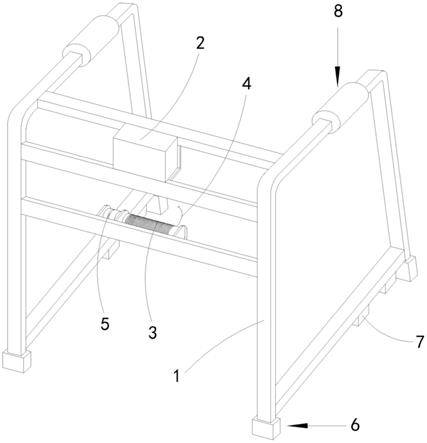
30.图1为本实用新型实施例1提供的智能助行器的结构示意图;
31.图2为本实用新型实施例1提供的卷筒机构和第一传感器的结构示意图;
32.图3为本实用新型实施例1提供的智能助行器的电性连接图;
33.图4为本实用新型实施例1提供的第三传感器的状态示意图;
34.图5为本实用新型实施例1提供的第三传感器的状态示意图;
35.图6为本实用新型实施例1提供的第三传感器的状态示意图。
具体实施方式
36.实施例1:
37.在本实施例中,参见图1至图3,提供一种智能助行器,包括框架1、控制器2、卷筒机构3、绳状部件4和第一传感器5;
38.控制器2、卷筒机构3和第一传感器5可分别设置于框架1上,其中,绳状部件4可被卷绕在卷筒机构3上,绳状部件4的一端可被牵拉,第一传感器5可被卷筒机构3驱动,且第一
传感器5与控制器2可电性连接;
39.控制器2至少用于通过第一传感器5获取被牵拉的绳状部件4的长度变化量。
40.现有技术中,病患使用助行器而可能发生摔倒的第一个场景是:病患在移动助行器的过程中,助行器与病患之间的间距被过量移动,导致病患的身体重心不稳定,从而产生摔倒。
41.本实施例中,智能助行器在实际使用时,需要将绳状部件4与病患的身体连接;例如:将绳状部件4的可被牵拉的一端连接于病患的腰部;当病患与智能助行器矗立于地面、且病患没有移动智能助行器时,绳状部件4当前的长度为s1,s1代表着当前的智能助行器与病患之间的间距;当病患移动智能助行器的过程中,随着智能助行器逐渐远离病患的腰部,则绳状部件4形成被病患的腰部牵拉,从而绳状部件4的长度从s1向s2转变,s2代表智能助行器被推动之后且重新矗立于地面时的智能助行器与病患之间的间距。从上述内容可知,s2与s2的差值,代表这绳状部件4被拉伸的长度,即为智能助行器被移动的距离;接着,当用户扶住智能助行器进行走动时,绳状部件4从s2向s1转变,其代表着智能助行器与病患的间距变小。
42.当绳状部件4被牵拉,使得绳状部件4的长度从s1向s2转变时,被牵拉的绳状部件4向卷筒机构3施加作用力,从而带动卷筒机构3转动,假设此时的卷筒机构3的转动方向为顺时针方向,使得卷筒机构3能够释放绳状部件4,从而使得绳状部件4的长度从s1可转变至s2;反之,当智能助行器与病患的间距减小时,卷筒机构3失去了绳状部件4的作用力,从而卷筒机构3反转,即此时的卷筒机构3应当按照逆时针方向转动,绳状部件4逐渐被缠绕在卷筒机构3上,从而使得绳状部件4的长度从s2可转变至s1。
43.参见图3,卷筒机构3优选的采用发条301、筒状部件302和轴承(图中未出示)的组合物,其中,筒状部件302与轴承固定连接,当筒状部件302转动时,可驱动轴承转动,且可挤压发条301或释放发条301;当卷筒机构3被绳状部件4牵拉时,卷筒机构3沿着顺时针转动,从而释放被卷绕在筒状部件302上的绳状部件4,此时,发条301处于被压缩状态而积蓄能量;反之,当卷筒机构3失去绳状部件4的拉力时,发条301释放能量,驱动卷筒机构3沿着逆时针方向转动,从而筒状部件302将绳状部件4卷绕。
44.当卷筒机构3沿着顺时针方向或逆时针方向转动时,被卷筒机构3驱动的第一传感器5可产生第一电信号,第一电信号可传输至控制器2,且被控制器2转换为数值并存储,其中,如果卷筒机构3沿着顺时针方向转动,则第一电信号应当被控制器2存储为
‘
正数’,如果卷筒机构3沿着逆时针方向转动,则第一电信号应当被控制器2存储为
‘
负数’;正数可代表绳状部件4被拉伸的长度,负数可代表绳状部件4被卷收的长度。
45.控制器2判断绳状部件4被拉伸的一种情况是:病患移动智能助行器之后,绳状部件4的长度仅仅从s1转变至s2,而没有发生绳状部件4的长度从s2向s1转变,说明病患仅做出了向病患正前方移动智能助行器的动作,而没有做出向病患的正后方移动智能助行器的动作,此时,卷筒机构3仅发生了顺时针的转动,控制器2应当根据第一电信号而转换的正数,作为智能助行器被移动的距离;
46.控制器2判断绳状部件4被拉伸的另一种情况是:病患移动智能助行器之后,绳状部件4的长度不但从s1转变至s2,且发生绳状部件4的长度从s2向s1转变,说明病患不但做出了向病患正前方移动智能助行器的动作,而且在向正前方移动之后,还做出了向病患正
后方移动智能助行器的动作,从而,卷筒机构3不但发生了顺时针转动,而且发生了逆时针转动,控制器2应当根据第一电信号而转换的正数和负数之和,作为智能助行器被移动的距离。
47.本实施例提供的智能助行器,绳状部件4可被连接于病患的身体上,当病患移动智能助行器时,绳状部件4可驱动卷筒机构3发生转动,被卷筒机构3驱动的第一传感器5可产生第一电信号,控制器2可接收第一电信号,且控制器2可判断当前卷筒是否为顺时针转动或逆时针转动,并能够获得绳状部件4被拉伸的长度;绳状部件4被拉伸的长度可代表本实施例的智能助行器被移动的间距。
48.因此,本实施例提出了智能助行器,解决了现有技术中,如何获得助行器的被移动的距离的技术问题。
49.具体的,第一传感器5具体为如下之一:光电编码器、霍尔编码器和机械编码器。
50.光电编码器、霍尔编码器和机械编码器的结构分别为本领域技术人员所知晓的公知常识。
51.以光电编码器为例,光电编码器至少包括发光部、码盘、转轴和接收部,码盘上设置有轴心通孔和边缘通孔,转轴可穿透轴心通孔,使得转轴与码盘形成同轴设置;码盘的两个面分别为第一面和第二面,发光部设置在第一面处,且发光部可向第一面至第二面方向发射光束,接收部设置在第二面处,光束可穿透边缘通孔而照射到接收部,从而接收部可产生第一电信号;在卷筒机构3驱动光电编码器的过程中,转轴与卷筒机构3同轴转动,卷筒机构3通过转轴驱动码盘转动,使得发光部发射的光束可间歇的穿透码盘上的边缘通孔而照射到接收部上,从而接收部根据接收到的光束而转变的第一电信号呈周期状;假设,码盘上仅设置有一个边缘通孔,则在卷筒机构3顺时针转动的情况下,如果接收器接收到两次第一电信号,代表码盘转动一圈,从而代表卷筒机构3转动一圈,卷筒机构3的圆周长度即为被拉伸的绳状部件4的长度,此时,控制器2应当将该长度记录为正数;假设,码盘上设置有两个边缘通孔,则在卷筒机构3逆时针转动的情况下,如果接收器机构到两次第一电信号,代表码盘转动半圈,从而代表卷筒机构3转动半圈,卷筒机构3的一半圆周长度即为被卷收的绳状部件4的长度,此时,控制器2应当将该长度记录为负数。
52.进一步的,现有技术中,病患使用助行器而可能发生摔倒的第二个场景是:助行器与地面之间的作用力不均衡,导致助行器本身可相对于地面发生倾斜,从而使得病患的身体重心不稳定,从而产生摔倒。
53.参见图1至图2,本实施例的智能助行器,还包括多个第二传感器6;
54.任一个第二传感器6分别设置于框架1,其中,任一个第二传感器6可分别且可同时被同一个平面挤压,且相邻的两个第二传感器6之间的间距满足第一预设间距;
55.任一个第二传感器6分别与控制器2电性连接,其中,控制器2可同时获得任一个第二传感器6的反馈信号。
56.其中,框架1应当设置有至少四个支腿处,任一个支腿处分别应当设置有一个第二传感器6;当智能助行器矗立在地面上时,受到智能助行器的重力作用和地面的反作用力,第二传感器6被智能助行器的重力和地面的反作用力挤压,从而使得第二传感器6产生第二电信号。
57.一种情况是,智能助行器的四个支腿完好,而地面则凸凹不平,从而智能助行器被
设置在凸凹不平的地面上时,可形成至少一个支腿上的第二传感器6不能够产生第二电信号的现象;换个角度说,当前的控制器2仅能够接收到四个第二传感器6中的一部分的第二电信号,从而,控制器2根据第二电信号的数量与预设的第二电信号的数量匹配,即可获得智能助行器相对于地面可产生倾斜的结果;
58.另一种情况是,智能助行器的四个支腿,其中一个支腿发生形变,导致智能助行器被设置在平整的地面上时,发生形变的支腿上的第二传感器6不能产生第二电信号,从而,控制器2所能够接收到的第二电信号的数量不满足预设第二电信号的数量,即可获得智能助行器相对于地面可产生倾斜的结果。
59.具体的,第二传感器6具体为压力传感器。
60.应当理解的是,在其他实施例中,还可以采用其他的传感器与相关的可伸缩结构来代替本实施例的压力传感器,例如:可设置有霍尔传感器和伸缩杆,当伸缩杆被压缩时,可触发霍尔传感器,当伸缩杆没有被压缩时,不可触发霍尔传感器。
61.采用压力传感器,其结构简单,并且易于设置在本实施例的智能助行器的支腿上;换个角度说,现有技术中的助行器,可通过简单改造即可将压力传感器设置在助行器上,其改造成本比较低廉。
62.进一步的,现有技术中,病患使用助行器而可能发生摔倒的第三个场景是:病患的脚步移动间距过大,从而使得病患的身体重心不稳定,从而产生摔倒。
63.参见图1、图2、图4至图6,本实施例的智能助行器,还包括至少两个第三传感器7;
64.任一个第三传感器7分别设置于框架1,其中,相邻的两个第三传感器7之间的间距满足第二预设间距;
65.任一个第三传感器7分别与控制器2电性连接,其中,控制器2用于判断接收到的任一个第三传感器7的反馈信号是否满足第一预设条件。
66.其中,第三传感器7具体为包括发射器和接收器的光电传感器。
67.应当理解的是,在其他实施例中,第三传感器7还可以采用其他传感器与匹配的结构代替光电传感器,例如:可采用磁传感器和带有磁体的鞋,病患穿戴带有磁体的鞋,而磁传感器设置在框架1上,当病患移动脚步时,磁体相对于磁传感器形成相互接近或相互远离的移动状态,磁传感器根据磁场的改变为产生强弱不同的电信号,或者,磁传感器可根据磁场的改变达到阈值而产生或截断电信号。
68.本实施例中,每一个光电传感器分别设置有发射器和接收器;其具备如下两种情况:
69.第一种情况,发射器和接收器被设置为一体的光电传感器,从而,该一体的光电传感器应当匹配有反射板;智能助行器沿着病患前进方向的左右两侧,应当分别设置有反射板和一体的光电传感器,其中,发射器首先发射出光束,光束照射在反光板上,从而产生反射光,接收器可接收到反射光;当病患的脚部位于反射板和一体的光电传感器之间时,病患的脚部可阻断发射器发出的光束,导致接收器无法接收到反射光。
70.第二种情况,发射器和接收器被设置为分体的光电传感器;智能助行器沿着病患前进方向的左右两侧,应当分别设置有发射器和接收器,发射器发出的光束可直接照射在接收器上;当病患的脚部位于发射器和接收器之间时,病患的脚部可阻断发射器发出的光束,导致接收器无法接收到光束。
71.在接收器能够接收到光束或反射光的条件下,接收器能够产生第三电信号,并将第三电信号传输至控制器2;控制器2根据第三电信号的真或假,来判断病患的脚部相对于第三传感器7的位置。
72.本实施例中,采用了至少两个第三传感器7;相邻的两个第三传感器7之间应当满足预设间距;换个角度说,沿着病患至智能助行器的方向,依次设置有第一个第三传感器7、第二个第三传感器7、第三个第三传感器7
……
,第一个第三传感器7应当位于病患与第二个第三传感器7之间;当病患迈出第一步时,病患的一只脚如果位于第一个第三传感器7处,则病患的一只脚可阻断第一个第三传感器7发出的光束;病患的一只脚如果位于第二个第三传感器7处,则病患的一只脚至少可阻断第二个第三传感器7发出的光束。换个角度说,如果第一个第三传感器7发出的光束被阻断,说明病患迈出的步幅处于合理的步幅范围(第一预设条件)内,此时,控制器2不能够接收到第一个第三传感器7的第三电信号,从而控制器2应当做出病患迈出脚部的步幅为合理的步幅的结果;如果第二个第三传感器7发出的光束被阻断,说明病患迈出的步幅已经超出合理的步幅范围,此时,控制器2至少不能够接收到第二个第三传感器7的第三电信号,从而控制器2应当做出病患迈出脚部的步幅为不合理的步幅的结果。
73.进一步的,现有技术中,病患使用助行器而可能发生摔倒的第四个场景是:病患仅一只手握住助行器,导致病患的支撑力不足,从而使得病患的身体重心不稳定,从而产生摔倒。
74.参见图1至图2,本实施例的智能助行器,还包括两个第四传感器8;
75.框架1的其中两处位置分别被设置为抓握部,其中,任一个第四传感器8分别被设置在其中一个抓握部处;
76.任一个第四传感器8分别与控制器2电性连接,其中,控制器2用于判断接收到的任一个第四传感器8的反馈信号是否满足第二预设条件。
77.其中,智能助行器的其中两处位置为病患的抓握处,换个角度说,当病患使用智能助行器时,病患的两只手应当分别抓握住框架1的其中一处。
78.在抓握处应当设置有第四传感器8,当抓握处被病患的手部抓握时,第四传感器8可产生第四电信号,并将第四电信号发送至控制器2。换个角度说,当病患的两只手分别抓握其中一个抓握部时,控制器2可同时接收到两个第四电信号;如果病患仅一只手抓握其中一个抓握部,则控制器2仅能够接收到一个第四电信号。
79.具体的,第四传感器8具体为温度传感器或压力传感器。
80.当采用温度传感器时,温度传感器的一部分应当裸露在抓握部的表面,从而病患的手部可与温度传感器的裸露处接触,使得温度传感器的第四电信号发生改变;控制器2应当根据温度传感器发出的第四电信号的变化量而判断病患的手部是否抓握住抓握部。
81.当采用压力传感器时,如果抓握部被用户的手部抓握,则压力传感器可产生第四电信号,控制器2应当根据压力传感器产生的第四电信号是否为真或假,来判断病患的手部是否抓握住抓握部。
82.进一步的,参见图2,在前述所有内容的基础上,本实施例的智能助行器,还包括报警装置9;
83.报警装置9设置于框架1,报警装置9与控制器2电性连接,其中,控制器2至少用于
根据绳状部件4的长度变化量触发报警装置9。
84.其中,当绳状部件4被牵拉、且绳状部件4被牵拉的长度大于预设长度时,控制器2应当发出第一控制信号,并根据第一控制信号将报警装置9的电回路导通,使得报警装置9发出警报。
85.以及,如果第二传感器6的数量为四个,而控制器2仅接收到三个或更少的第二电信号时,控制器2应当发出第二控制信号,并根据第二控制信号将报警装置9的电回路导通,使得报警装置9发出警报。
86.以及,如果第三传感器7的数量为两个,当第一个第三传感器7的第三电信号为假,而第二个第三传感器7的第三电信号为真时,则控制器2不能够发出第三控制信号;如果第二个第三传感器7的电信号为假时,则控制器2发出第三控制信号,并根据第三控制信号将报警装置9的电回路导通,使得报警装置9发出警报。
87.以及,当控制仅接收到一个第四传感器8发出的第四电信号时,控制器2应当发出第四控制信号,并根据第四控制信号将报警装置9的电回路导通,使得报警装置9发出警报。
88.应当理解的是,报警装置可选用声光报警器。
89.进一步的,还包括安全带(图中未出示);
90.安全带可连接于框架1。
91.其中,病患可首先将安全带穿戴于身体上,再将安全带与框架1连接。当病患在使用本实施例的智能助行器行走时,如果发生病患摔倒的动作,则在病患摔倒的过程中,可通过安全带与框架1限制病患的摔倒方向和摔倒位置,从而减少病患实际摔倒在地面的情况发生。
92.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1