镜像手套控制装置的制作方法
1.本实用新型涉及医疗康复器械技术领域,具体而言涉及镜像手套控制装置。
背景技术:
2.手部康复训练对于手部疾病和中风等其他疾病的康复都起到至关重要的作用。其中手指的康复治疗和训练是手部功能缺失或手部残疾治疗的重要手段,在脑卒中的诸多后遗症中,手部功能障碍是脑卒中后偏瘫患者最常见的障碍之一,严重影响患者的日常生活,给患者家庭和社会带来沉重负担。诸多的脑卒中患者中,又以半瘫为主,在保证治疗效果的前提下,增加患者康复的参与度,提高患者的康复意愿又是非常重要。
3.镜像疗法是指利用平面镜成像原理,将患者健侧活动的画面复制到患侧,让患者想象患侧运动通过错觉、视觉反馈以及虚拟现实,结合康复训练项目而成的治疗手段。手部康复外骨骼设备在脑卒中手部康复中起到很重要的作用,单市面上很多都是单纯的被动康复训练,患者的参与度不高,所以一款能将康复外骨骼与镜像治疗相结合起来进行手功能康复治疗的镜像手套是很有必要。
4.目前市面上一些镜像产品只是简单采集一个手部开关信号,而不是采集的实时手部状态,同时需要的采集装置大都是拖线连接,这对于不同应用场景进行康复训练带来麻烦,所以便携、低功耗、无线的手部信号采集装置-镜像手套是非常必要的。
5.现有技术文献:
6.专利文献1:cn109939324a基于多模感觉康复手套的肢体镜像治疗装置
7.专利文献2:cn111068263a镜像治疗的增强现实手功能康复训练装置
技术实现要素:
8.本实用新型目的在于提供一种镜像手套控制装置,包括:
9.手套,用于佩戴到患者健侧手;
10.传感器模块,包括陀螺仪单元以及弯曲度传感器,所述陀螺仪单元用于获取健侧手的姿态信息,所述弯曲度传感器被设置到所述手套的指部,用于获取健侧手手指的弯曲状态;
11.无线模块,用于与患侧手所佩戴的外骨骼通讯连接,进行数据交互;
12.通讯模块,包括与外部设备信号连接的通讯接口;
13.控制模块,用于将陀螺仪单元以及弯曲度传感器获取的健侧手姿态信息通过无线模块传输至患侧手所佩戴的外骨骼;
14.供电模块,用于对传感器模块、无线模块、通讯模块和控制模块供电;
15.以及将传感器模块、无线模块、通讯模块、控制模块和供电模块包围的外壳。
16.优选的,所述供电模块包括电源单元、电压检测单元和充电管理单元,所述电压检测单元获取电源单元的电压状态,所述充电管理单元用于向电源单元充电。
17.优选的,所述电源单元包括可充电锂电池。
18.优选的,所述通讯接口包括程序下载接口、电源接口、usb接口、蜂鸣器接口和多路传感器信号接入接口,用于与外部设备进行有线连接。
19.优选的,还包括蜂鸣器,连接到所述蜂鸣器接口,所述蜂鸣器接口通过蜂鸣器驱动单元与控制模块信号连接,在系统开机自检过程中,被驱动产生蜂鸣信号,被用作于提示声音。
20.优选的,所述程序下载接口与控制模块信号连接,用于通过外部设备向控制模块中写入运行程序。
21.优选的,所述usb接口与控制模块信号连接,用于通过pc向控制模块中写入无线模块相关的信息、以及相关的配置信息。
22.优选的,还包括显示单元,所述显示单元用于显示无线模块的连接状态、电池电压状态和系统运行状态信息。
23.优选的,所述显示单元包括led灯珠,并以不同颜色以及点亮状态表达显示信息。
24.与现有技术相比,本实用新型的优点在于:
25.本实用新型能够穿戴在健侧手上,并利用陀螺仪检测健侧手的空间运动姿态,通过弯曲度传感器检测健侧手手指的弯曲状态,并通过无线的方式对所获取的运动姿态向患侧手的外骨骼实时通讯,使得外骨骼装置能对应的跟随健侧手的手部动作而动作,这种双侧运动,通过健侧手带动患侧手运动的进行运动模式,广泛刺激运动皮层易化双侧运动通路,多重刺激共同作用,能大大提高手功能快速恢复。
26.应当理解,前述构思以及在下面更加详细地描述的额外构思的所有组合只要在这样的构思不相互矛盾的情况下都可以被视为本公开的实用新型主题的一部分。另外,所要求保护的主题的所有组合都被视为本公开的实用新型主题的一部分。
27.结合附图从下面的描述中可以更加全面地理解本实用新型教导的前述和其他方面、实施例和特征。本实用新型的其他附加方面例如示例性实施方式的特征和/或有益效果将在下面的描述中显见,或通过根据本实用新型教导的具体实施方式的实践中得知。
附图说明
28.附图不意在按比例绘制。在附图中,在各个图中示出的每个相同或近似相同的组成部分可以用相同的标号表示。为了清晰起见,在每个图中,并非每个组成部分均被标记。现在,将通过例子并参考附图来描述本实用新型的各个方面的实施例,其中:
29.图1是镜像手套控制装置与外骨骼装置互联状态的示意图;
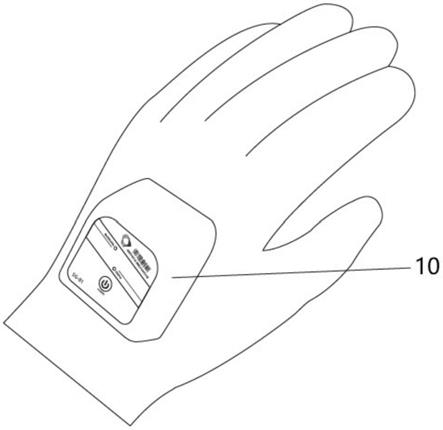
30.图2是镜像手套控制装置的结构示意图;
31.图3是镜像手套控制装置的结构框图;
32.图4是镜像手套控制装置的原理框图;
33.图5是镜像手套控制装置的工作流程图。
具体实施方式
34.为了更了解本实用新型的技术内容,特举具体实施例并配合所附图式说明如下。
35.在本公开中参照附图来描述本实用新型的各方面,附图中示出了许多说明的实施例。本公开的实施例不必定意在包括本实用新型的所有方面。应当理解,上面介绍的多种构
思和实施例,以及下面更加详细地描述的那些构思和实施方式可以以很多方式中任意镜像手套控制装置来实施,这是因为本实用新型所公开的构思和实施例并不限于任何实施方式。另外,本实用新型公开的一些方面可以单独使用,或者与本实用新型公开的其他方面的任何适当组合来使用。
36.结合图1所示,本实用新型提出的镜像手套控制装置100是佩戴到患者的健康手(健侧手)上的,与镜像手套控制装置100配套使用的目标设备,即能驱动被治疗手(患侧手)完成预定动作的外骨骼设备200,如cn209884686u所示的手部关节持续被动活动仪控制装置。
37.结合图2所示,本实用新型目的在于提供一种镜像手套控制装置,包括用于佩戴到患者健侧手的手套,在可选的实施例中,手套由纤维纺织而成,具有微弹的弹性,或采用丁晴橡胶等橡胶等,外壳10被固定到手套上,保持可随着手套的运动而运动。
38.进一步的,在外壳10的内部设有传感器模块、无线模块、通讯模块、控制模块和供电模块。
39.其中,传感器模块包括陀螺仪单元,用于获取健侧手的姿态信息,具体包括手部在空间上不同方向的加速度状态,以及翻转状态等,还包括弯曲度传感器,弯曲度传感器被设置到手套的指部,用于获取健侧手手指的弯曲状态;无线模块用于与患侧手所佩戴的外骨骼通讯连接,进行数据交互;如此,在获得手部的空间姿态信息后,无线模块可将所获得的姿态信息与外骨骼通讯,使外骨骼设备200获得健侧手的运动信息(包括手部在空间上的加速度、翻转以及手指的弯曲程度),进一步的使得患侧手能镜像的做出与健侧手相同的动作。
40.这种双侧运动,通过健侧手带动患侧手运动的进行运动模式,广泛刺激运动皮层易化双侧运动通路,多重刺激共同作用,能大大提高手功能快速恢复。
41.结合图3和图4所示,通讯模块包括通讯单元以及与外部设备信号连接的通讯接口;控制模块包括主控单元,用于将陀螺仪单元获取的姿态信息通过无线模块传输至患侧手所佩戴的外骨骼;供电模块用于对传感器模块、无线模块、通讯模块和控制模块供电;外壳10将传感器模块、无线模块、通讯模块、控制模块和供电模块包围。
42.结合图3和图4所示,供电模块包括电源单元(系统电源1单元、系统电源2单元、系统电源3单元)、电压检测单元和充电管理单元。
43.结合图4所示,系统电源1单元用于给陀螺仪单元和主控单元供电,系统电源2单元用于给无线通讯单元供电,系统电源3单元用于给多路传感器单元(弯曲度传感器)供电。
44.其中,电源单元包括可充电锂电池,以及控制电源与系统连接的开关按键。
45.其中,电压检测单元获取电源单元的电压状态,电压检测单元为电池电压检测电路,检测到外部电池电量低于设定的阈值后,控制模块通过系统状态显示单元进行相关状态显示,提示用户电池电量低,需要及时充电。
46.其中,充电管理单元用于向电源单元充电,外部适配器电源通过usb端口接入电池充电单元,充电适配器可通过电源接口和usb接口向电源单元充电。
47.结合图3和图4所示,通讯接口包括程序下载接口、电源接口、usb接口、蜂鸣器接口和多路传感器信号接入接口,用于与外部设备进行有线连接。
48.蜂鸣器连接到蜂鸣器接口,蜂鸣器接口通过蜂鸣器驱动单元与控制模块信号连
接,在系统开机自检过程中,被驱动产生蜂鸣信号,被用作于提示音。
49.在可选的实施例中,系统接通电源开机后,控制模块控制先进行自检和外部相关部件连接的检测,如果自检通过则进行下一步操作,否则进行开机异常提醒,提示相关部分出现异常,这部分包含提醒有蜂鸣器和显示部分提醒,其中系统的电源状态自检以及外部连接状态监测的原理均属于现有技术在此不再赘述。
50.自检成功后,控制装置会有相关蜂鸣器提示,给用户健侧手带上镜像手套后,按照指定动作对传感器的进行校准,识别每一个用户手部数据,然后按照每个用户手部数据进行左右手和手参数的自动设定,以便更好对用户的手势进行识别,完成后蜂鸣器也会进行相应的提醒。
51.为了能实现对外骨骼设备的预绑定,usb接口与控制模块信号连接,用于通过外部设备向控制模块中输入无线模块与配对信息。
52.用usb数据线分别接入控制装置的usb接口和pc的usb端口,打开pc端口的上位机软件,进行相关端口和参数设置。连接成功后,然后把目标设备(外骨骼设备)的id写入控制装置,控制装置自动保存目标设备的id,保存完成后,设备开机就会搜索目标设备自动进行连接。
53.显示单元用于显示无线模块的连接状态、电池电压状态和系统运行状态信息。如无线模块处于待连接状态,或连接成功状态;电池电压处于充电状态或欠压状态;系统处于故障或正常运行状态。
54.在可选的实施例中,手指上设置弯曲度传感器,并将手指上的弯曲度传感器信号线接入到多路传感器信号接入接口,用于收集健侧手的手指弯曲状态信号。
55.在可选的实施例中,显示单元包括led灯珠,并以不同颜色以及点亮状态表达显示信息。无线模块处于待连接状态(led灯珠为绿色闪烁状态),或连接成功状态(led灯珠为绿色常亮状态);电池电压处于充电状态(led灯珠为黄色闪烁状态)或欠压状态(led灯珠为黄色常亮状态);系统处于故障(led灯珠为红色闪烁状态)或正常运行状态(led灯珠为蓝色常亮状态)。
56.结合图5所示,用usb数据线分别接入控制装置的usb接口和pc的usb端口,连接控制装置和pc电脑,打开pc端口的上位机软件,进行相关端口和参数设置,并连接控制装置,连接成功后,把目标设备(患侧手外骨骼设备)的id写入控制装置,控制装置自动保存目标设备的id,保存完成后,设备开机就会搜索目标设备自动进行连接。
57.通过控制装置的外壳10上的电源开关控制装置接通电源开机,开机后先进行自检和外部相关部件连接的检测,如果自检通过则进行下一步操作,否则进行开机异常提醒,提示相关部分出现异常,这部分包含提醒有蜂鸣器和显示单元提醒。
58.自检成功后,控制装置会有相关蜂鸣器提示,给用户健侧手带上镜像手套后,按照指定动作对传感器的进行校准,识别每一个用户手部数据,然后按照每个用户手部数据进行左右手和手参数的自动设定,以便更好对用户的手势进行识别,完成后蜂鸣器也会进行相应的提醒。
59.以上操作完成后,系统进入正常运行状态,接着无线模块处于等待连接状态,此时打开目标设备,控制装置主控单元通过无线模块进行自动连接,如非预绑定设备将不能连接,连接成功后,镜像手套的控制装置处于准备状态。然后将目标设备戴到用户的患侧手,
在医护人员的指导下进行康复训练,康复训练完成。
60.长时间不用通过控制装置的操作界面,关闭电源。如果没有关闭电源,控制装置会根据用户是否活动,一定时间后控制装置自动进入休眠状态,如果用户想重新使用设备,只需要带上进行晃动即可退出休眠状态,恢复到准备状态,可以理解的,晃动时陀螺仪传感器给出信号,控制器可根据此信号将系统恢复到准备状态。
61.结合以上实施例,本实用新型采集陀螺仪传感器以及多路传感器数据,然后通过控制装置进行转换,可以准确的掌握健侧手部状态;并采用无线方式进行数据交互,使用更加便携和方便,实时将健侧手的数据传输患侧手进行康复训练;另外本实用新型采用电池供电,使产品不需要接入市电,设备使用不局限于特定的环境中使用。
62.虽然本实用新型已以较佳实施例揭露如上,然其并非用以限定本实用新型。本实用新型所属技术领域中具有通常知识者,在不脱离本实用新型的精神和范围内,当可作各种的更动与润饰。因此,本实用新型的保护范围当视权利要求书所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1