一种基于双图像传感器的光学系统的制作方法
1.本实用新型涉及眼科光学设备相关技术领域,具体是指一种基于双图像传感器的光学系统。
背景技术:
2.人眼是人体最重要的器官之一,而在当代,随着科技的进步,数码产品特别是手机、电脑、平板电脑等越来越普及,人们使用这些数码产品的时间越来越长,人眼观看显示屏幕的时间也相应的越来越长,甚至出现过度的情况,而这些都增加了人眼病变的几率,因此诸如近视眼、青光眼等眼科疾病的患者越来越多。近视眼、青光眼等眼科疾病都会反映在人眼眼球形状的变化上,通过对人眼眼球形状的检测可以直接或间接的获取人眼关键的医学数据,用以预防、诊断或治疗眼科疾病。基于此,本实用新型提出一种光学系统,可以高精度检测人的眼球,获取人眼眼球三维立体形貌。
技术实现要素:
3.本实用新型为了解决目前市场上缺乏一种能够识别人眼眼球形状的设备的不足,提供了一种能够识别人眼眼球形状的基于双图像传感器的光学系统。
4.为实现上述目的,本实用新型采用的技术方案如下:
5.一种基于双图像传感器的光学系统,包括:结构光投射器和成像组件,所述结构光投射器置于成像组件之间,所述结构光投射器正对于眼球前方,所述成像组件和结构光投射器均置于眼球的同一侧。
6.结构光投射器首先将光照向眼球,眼球将来光反射后,分别射向两侧的成像组件,成像组件最后将反射光信息汇总并处理,得出人眼形状的立体形象。
7.作为优选,所述成像组件包括右图像传感器、右成像透镜组和左图像传感器、左成像透镜组,所述右图像传感器和右成像透镜组均置于结构光投射器的右侧,所述左成像透镜组和左图像传感器均置于结构光投射器的左侧。这样设计的目的是两侧反射光能够经过左、右成像透镜组进行对焦,使左、右图像传感器更清晰地得到反射光信息。
8.作为优选,所述右成像透镜组置于眼球与右图像传感器之间,所述左成像透镜组置于眼球与左图像传感器之间。这样设计的目的是将两侧反射光进行对焦后再映射到图像传感器上,能够更精确地获得眼球反射光信息。
9.作为优选,所述右成像透镜组和眼球之间的间距等于左成像透镜组和眼球之间的间距,所述右图像传感器和右成像透镜组之间的间距等于左图像传感器和左成像透镜组之间的间距。这样设计的目的是便于左、右图像传感器获得同样清晰的反射光。
10.作为优选,所述左图像传感器和右图像传感器、左成像透镜组和右成像透镜组均以结构光投射器为中轴呈左右对称分布。这样设计的目的是使两侧成像透镜组和图像传感器均获得同样清晰度的反射光。
11.作为优选,所述结构光投射器正对眼球的一端设有坡面。这样设计的目的是使结
构光投射器投射出来的光更为顺滑地照射到眼球上。
12.本实用新型的有益效果是:两侧成像透镜组和图像传感器均获得同样清晰度的反射光,使结构光投射器投射出来的光更为顺滑地照射到眼球上,能够识别眼球的三维形状。
附图说明
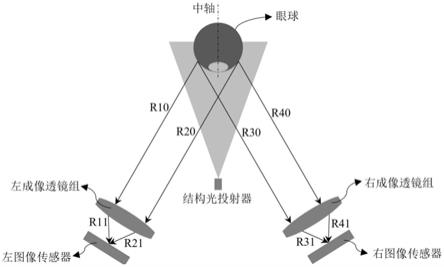
13.图1为本实用新型的结构示意图;
14.图2为本实用新型的结构光投射器的立体示意图;
15.图3为本实用新型的原理示意图;
16.图4为本实用新型的原理示意图。
17.图中:1.结构光投射器,2.右图像传感器,3.右成像透镜组,4.眼球,5.左成像透镜组,6.左图像传感器,7.坡面。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型做进一步的描述。
19.如图1所示的实施例中,一种基于双图像传感器的光学系统,包括:结构光投射器
1
和成像组件,
结构光投射器
1
置于成像组件之间,
结构光投射器
1
正对于眼球
4
前方,
成像组件和结构光投射器
1
均置于眼球
4
的同一侧,
成像组件包括右图像传感器
2
、右成像透镜组
3
和左图像传感器
6
、左成像透镜组
5
,
右图像传感器
2
和右成像透镜组
3
均置于结构光投射器
1
的右侧,
左成像透镜组
5
和左图像传感器
6
均置于结构光投射器
1
的左侧,
右成像透镜组
3
置于眼球
4
与右图像传感器
2
之间,
左成像透镜组
5
置于眼球
4
与左图像传感器
6
之间,
右成像透镜组
3
和眼球
4
之间的间距等于左成像透镜组
5
和眼球
4
之间的间距,
右图像传感器
2
和右成像透镜组
3
之间的间距等于左图像传感器
6
和左成像透镜组
5
之间的间距,
左图像传感器
6
和右图像传感器
2
、左成像透镜组
5
和右成像透镜组
3
均以结构光投射器
1
为中轴呈左右对称分布。
20.如图2所示,
结构光投射器
1
正对眼球
4
的一端设有坡面
7
。
21.整个光学系统由五部分构成:结构光投射器1、左成像透镜组5、左图像传感器6、右成像透镜组3、右图像传感器2;
22.结构光投射器1主要作用是在人眼球4上投射出点阵状或者特定形状的图案;
23.左成像透镜组5作用是将人眼球4的左视差图像聚焦成像至左图像传感器6;
24.右成像透镜组3作用是将人眼球4的右视差图像聚焦成像至右图像传感器2;
25.左图像传感器6用以将眼球4的左视差图像转换为数字图像,图像传感器为ccd或cmos;
26.右图像传感器2用以将眼球4的右视差图像转换为数字图像,图像传感器为ccd或cmos。
27.如图3所示,首先,结构光投射器1工作,投射一定角度范围的点阵状或者特定形状的图案到人眼球4上,该范围覆盖整个眼球4,即整个眼球4都会有点阵状或者特定形状的图案,当结构光投射器1的光投射到人眼球4后,会被眼球4所反射,被反射的光线中,部分会进入成像透镜组后成像在图像传感器上。参与成像的所有光线中最边缘的光线为r10、r20、
r30、r40,以眼球4中轴线为界,r10和r20位于同一侧,r30和r40位于另一侧。
28.r10和r20以及二者中间所有的光线入射通过左成像透镜组5变为光线r11和光线r21,然后成像在左图像传感器6上,形成眼球的左视差图像。
29.同样的,r30和r40以及二者中间所有的光线入射通过右成像透镜组3变为光线r31和光线r41,然后成像在右图像传感器2上,形成眼球的右视差图像。
30.眼球可认为由无数个点形成,因此通过采样的方式,获取足够多的点的数据后,可以逆向推算出眼球的三维立体形貌,如图4所示,特征点p为眼球外表面任一点,该点经过左成像透镜组5后成像于左图像传感器6,所成像点表示为p1;p点经过右成像透镜组3后成像于右图像传感器2,所成像点表示为p2,p1、p2的数据可以分别读取左右图像传感器获取。p和p1、p2存在如下函数关系:
31.p=f(p1,p2)
[0032] 该函数式由图像处理算法确定, 由于p1、p2数据已知,根据函数关系式即可得到p的数据,因为p是眼球外表面任一特征点,也就是说,可以获得眼球外表面所有点的数据,进而逆向推算出眼球的三维立体形貌。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1