一种无接触手持式超声刀的制作方法
1.本技术涉及医疗设备的领域,尤其是涉及一种无接触手持式超声刀。
背景技术:
2.超声手术刀是一种高频电外科设备,主要用于生物组织的切割与血管闭合等操作。但现有的超声手术刀基本都是接触式的,也就是刀身会和人体内的组织进行接触,属于有创、微创收手术的范畴。
3.高强度聚焦超声技术是一种通过将超声波进行聚焦从而能够提高目标区域的温度的技术,也被应用于医疗领域中,通过该技术能够对病变组织进行升温,从而使得病变组织中的细胞蛋白质变性,从而达到消融病变组织的目的。
4.因此现阶段需要研制出一种能够基于高强度聚焦超声技术且能够应用于无创手术的无接触手持式超声刀。
技术实现要素:
5.为了提高超声刀的操作便利性,本技术提供一种无接触手持式超声刀。
6.本技术提供的一种无接触手持式超声刀采用如下的技术方案:
7.一种无接触手持式超声刀,包括壳体、水囊、升降机构、超声探头和超声换能器,所述壳体一端开设有开口,所述水囊罩设于壳体开口处与壳体形成封闭的腔室,所述超声探头与所述超声换能器设于壳体与水囊围成的腔室内并靠近水囊设置,所述升降机构设于所述壳体内且连接所述超声探头和超声换能器,用于驱动所述超声探头和超声换能器移动。
8.通过采用上述技术方案,将超声探头设置在高强度聚焦超声系统中,使得高强度聚焦超声系统能够具备超声引导的引导方式,使得在进行无创消融手术中,能够获取超声引导的实时图像,从而有助于进行无创消融手术,提高了高强度聚焦超声系统的成像实时性。在采用上述无接触手持式超声刀进行无创手术时,医生会在病人的皮肤处涂抹耦合剂,并手持无接触手持式超声刀,在开启无接触手持式超声刀后,无接触手持式超声刀内的超声换能器会发出高强度聚焦超声波对病变组织进行消融。整个过程,医生仅需手持并移动上述无接触手持式超声刀即可完成对组织的消融,提高了操作的便利性。
9.优选的,所述壳体内设有隔板,所述隔板将壳体远离水囊的一端分隔为无水区、将壳体靠近与水囊的一端分隔为有水区。
10.通过采用上述技术方案,隔板分隔出的无水区将水囊的水隔离,避免壳体内的部分用电元件遇水损坏。
11.优选的,所述水囊包括水囊本体和连接圈,所述连接圈沿所述水囊边缘设置,所述连接圈可拆卸连接于壳体开口处。
12.通过采用上述技术方案,连接圈与壳体的可拆卸连接,使水囊可更换。
13.优选的,所述升降机构包括第一电机、第一支撑板、第一丝杠和第一移动杆,所述第一支撑板设于所述无水区内,第一支撑板沿壳体至水囊的方向设置且一端与隔板连接,
所述第一电机设于第一支撑板远离隔板的一端,所述第一电机的输出轴与第一丝杠同轴连接,所述第一丝杠与第一支撑板平行,所述第一移动杆远离水囊的端部弯折形成与第一丝杠螺纹配合的第一连接部,所述第一连接部上设有第一滑块,所述第一支撑板侧面沿长度方向开设有与第一滑块滑动配合的第一滑槽,所述第一移动杆靠近水囊的端部贯穿隔板连接所述超声探头。
14.通过采用上述技术方案,第一电机驱动第一丝杠旋转,由于第一滑槽对第一滑块的限位,使第一滑块连接的第一连接部沿着第一丝杠长度方向移动的,从而驱使第一连接部连接的第一移动杆移动,从而带动超声探头移动。
15.优选的,所述超声换能器固定连接于所述移动杆靠近超声探头的一端。
16.通过采用上述技术方案,超声探头与超声换能器在第一移动杆的带动下同步移动,使超声换能器的聚束距离不变而聚束位置在第一移动杆的长度方向进行移动。
17.优选的,所述超声换能器滑动连接于所述移动杆靠近超声探头的一端,所述升降机构还包括第二电机、第二支撑板、第二丝杠和第二移动杆,所述第二支撑板设于所述无水区内,第二支撑板沿壳体至水囊的方向设置且一端与隔板连接,所述第二电机设于第二支撑板远离隔板的一端,所述第二电机的输出轴与第二丝杠同轴连接,所述第二丝杠与第二支撑板平行,所述第二移动杆远离水囊的端部弯折形成与第二丝杠螺纹配合的第二连接部,所述第二连接部上设有第二滑块,所述第二支撑板侧面沿长度方向开设有与第二滑块滑动配合的第二滑槽,所述第二移动杆靠近水囊的端部贯穿隔板连接所述超声换能器。
18.通过采用上述技术方案,第二电机带动第二丝杠转动,由于第二连接部的第二滑块受到第二滑槽的限位,因此第二连接部沿着第二丝杠长度方向移动,带动第二连接部连接的第二移动杆移动,从而使第二连接杆连接的超声换能器在第一连接杆上滑动。超声换能器与超声探头之间的距离里可调,从而调整超声换能器对超声波的聚束距离。
19.优选的,所述壳体内侧壁靠近开口处设有连接环,所述连接环朝向开口的一面开设有螺孔,所述隔板上开设有与所述螺孔对齐的通孔,螺栓穿过所述通孔与所述螺孔螺纹连接。
20.通过采用上述技术方案,在装配时,先将升降结构、超声探头和超声换能器装配于隔板上,然后将隔板与连接环通过螺栓连接,装配简单方便。
21.优选的,所述隔板上设有第一密封圈,所述第一移动杆穿过所述第一密封圈且与所述第一密封圈滑动配合。
22.通过采用上述技术方案,第一密封圈的外壁与隔板上供第一移动杆穿过的孔贴合,第一密封圈的内壁与第一移动杆的外壁贴合,阻止水囊肿的水从隔板与第一移动杆之间的缝隙进入无水区。
23.优选的,所述隔板上设有第二密封圈,所述第二移动杆穿过所述第二密封圈且与所述第二密封圈滑动配合。
24.通过采用上述技术方案,第二密封圈的外壁与隔板上供第二移动杆穿过的孔贴合,第二密封圈的内壁与第二移动杆的外壁贴合,阻止水囊中的水从隔板与第二移动杆之间的缝隙进入无水区。
25.优选的,所述壳体远离水囊的一端外侧是设有挡杆。
26.通过采用上述技术方案,当人手握住壳体时,把挡杆搭在手人的虎口,提高无接触
手持式超声刀在人手上的稳定性。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1、将超声探头设置在高强度聚焦超声系统中,使得高强度聚焦超声系统能够具备超声引导的引导方式,使得在进行无创消融手术中,能够获取超声引导的实时图像,从而有助于进行无创消融手术,提高了高强度聚焦超声系统的成像实时性。
29.2、在采用上述无接触手持式超声刀进行无创手术时,医生会在病人的皮肤处涂抹耦合剂,并手持无接触手持式超声刀,在开启无接触手持式超声刀后,无接触手持式超声刀内的超声换能器会发出高强度聚焦超声波对病变组织进行消融。
30.3、整个过程,医生仅需手持并移动上述无接触手持式超声刀即可完成对组织的消融,提高了操作的便利性。
31.4、整个过程,无需在病人皮肤上用手术刀切出创口,不会在病人皮肤上留下手后伤疤。
附图说明
32.图1是本技术实施例1的无接触手持式超声刀整体结构示意图;
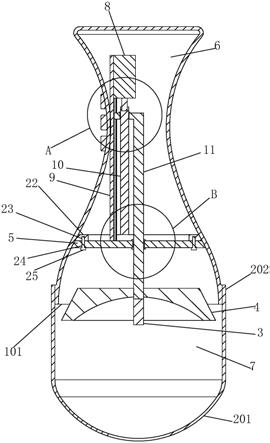
33.图2是本技术实施例1的无接触手持式超声刀剖视图;
34.图3是图2中a部的放大图;
35.图4是图2中b部的放大图;
36.图5是本技术实施例2的无接触手持式超声刀整体结构示意图;
37.图6是本技术实施例3的无接触手持式超声刀剖视图;
38.图7是图6中c部的放大图。
39.附图标记说明:1、壳体;101、开口;2、水囊;201、水囊本体;202、连接圈;3、超声探头;4、超声换能器;5、隔板;6、无水区;7、有水区;8、第一电机;9、第一支撑板;10、第一丝杠;11、第一移动杆;12、第一连接部;13、第一滑块;14、第一滑槽;15、第二电机;16、第二支撑板;17、第二丝杠;18、第二移动杆;19、第二连接部;20、第二滑块;21、第二滑槽;22、连接环;23、螺孔;24、通孔;25、螺栓;26、第一密封圈;27、第二密封圈;28、挡杆;29、第一丝杠螺母;30、第二丝杠螺母;31、按钮。
具体实施方式
40.以下结合附图1-7对本技术作进一步详细说明。
41.实施例1
42.本技术实施例公开一种无接触手持式超声刀。参照图1,无接触手持式超声刀包括壳体1和水囊2,壳体1呈外表面呈中部径向向内凹陷的圆筒状,壳体1上端的直径小于下端的直径。壳体1的上端封闭,下端为开口101,在壳体1的开口101处外侧壁配合有水囊2。水囊2包括水囊本体201和连接圈202,水囊本体201呈中空的球缺形,连接圈202一体成型于水囊本体201的周向边缘。在本技术实施例中,连接圈202的内侧壁周向开设有内螺纹,在壳体1靠近开口101处的外侧壁周向开设有外螺纹,连接圈202与壳体1开口101处螺纹配合,实现密封,以将壳体1与水囊2形成封闭的腔室。
43.参照图2,壳体1靠近水囊2的一端内侧壁周向一体成型有呈环形的连接环22,连接
环22靠近水囊2的一面连接有隔板5,隔板5的横截面呈圆形,隔板5覆盖连接环22的孔,以将壳体1与水囊2形成的腔室分隔为无水区6和有水区7,其中,无水区6位于隔板5背离水囊2的一侧,有水区7位于隔板5靠近的水囊2的一侧。在本技术实施例中,连接环22靠近水囊2的一侧开设有螺纹孔,隔板5靠近边缘处开设有与螺纹孔对齐的通孔24,在隔板5与连接环22固定时,螺栓25的螺杆穿过通孔24与螺纹孔螺纹连接,螺栓25的头部抵紧隔板5远离连接环22的一面。
44.参照图2和图3,隔板5上连接有升降机构,其中,升降结构包括第一电机8、第一支撑板9、第一丝杠10和第一移动杆11。第一支撑板9垂直连接于隔板5位于无水区6的一面,第一支撑板9与隔板5之间的连接方式可以是一体成型,也可以是胶接、螺栓25紧固等方式。第一支撑板9的侧面沿长度方向开设有第一滑槽14,第一电机8固定于第一支撑板9的顶部,第一电机8与第一支撑板9之间可以通过螺栓25紧固的方式固定。第一电机8的输出轴朝隔板5方向与隔板5垂直设置,第一丝杠10同轴焊接于输出轴端部,第一移动杆11的上端90
°
弯折形成第一连接部12。在一种实施方式中,第一连接部12可设置为直接与第一丝杠10螺纹配合。在其它实施方式中,也可以是在第一连接部12上过盈配合第一丝杠10螺母,由第一丝杠10螺母与第一丝杠10螺纹配合。第一连接部12上一体成型有第一滑块13,第一滑块13滑动配合于滑槽内,从而在第一丝杠10转动时,第一滑槽14限制具有第一滑块13的第一移动杆11转动,驱使第一移动杆11沿第一丝杠10长度方向移动。第一移动杆11的主体部分与第一支撑板9平行,且第一移动杆11的下端贯穿隔板5至有水区7内。第一移动杆11的位于有水区7的端部焊接有超声探头3,且在有水区7内,第一移动杆11靠近超声探头3的位置焊接有超声换能器4。
45.参照图4,为提高第一移动杆11与隔板5之间的密封性,隔板5上供第一移动杆11穿过的孔上装配有第一密封圈26,第一密封圈26的外侧壁与孔壁胶接,第一密封圈26的内侧壁与第一移动杆11紧密贴合,且第一移动杆11与第一密封圈26之间可相对滑动。
46.参照图1和图2,壳体1的侧壁设有3个按钮31,3个分别用于控制无接触手持式超声刀的电流通断、超声探头3的上升和超声探头3的下降。由于超声探头3与超声换能器4均固定于第一移动杆11,因此在第一移动杆11升降时,超声探头3与超声换能器4同步升降。
47.本技术实施例一种无接触手持式超声刀的实施原理为:在采用上述无接触手持式超声刀进行无创手术时,医生会在病人的皮肤处涂抹耦合剂,并手持无接触手持式超声刀,在开启无接触手持式超声刀后,无接触手持式超声刀内的超声换能器4会发出高强度聚焦超声波对病变组织进行消融。按动壳体1侧壁的按钮31,可调节超声探头3与超声换能器4与目标组织之间的距离,从而调节超声探头3的成像位置和超声换能器4的聚束位置。操作简单方便,并且无需在病人皮肤上用手术刀割出创口,不会造成术后伤疤。
48.实施例2
49.参照图5,本实施例与实施例1的不同之处在于,壳体1的上端外侧壁一体成型有挡杆28,挡杆28的端部向下弯折。当操作人员手持壳体1时,挡杆28搭在人手的虎口处,可提高人手握壳体1时的稳定性。
50.实施例3
51.参照图6和图7,本实施例与实施例1的不同之处在于,超声换能器4与第一移动杆11滑动配合,超声换能器4上开设有与第一移动杆11滑动配合的孔。升降机构还包括第二电
机15、第二支撑板16、第二丝杠17和第二移动杆18,第二支撑板16垂直连接于隔板5位于无水区6的一面,第二支撑板16与隔板5之间的连接方式可以是一体成型,也可以是胶接、螺栓25紧固等方式。第二支撑板16的侧面沿长度方向开设有第二滑槽21,第二电机15固定于第二支撑板16的顶部,第二电机15与第二支撑板16之间可以通过螺栓25紧固的方式固定。第二电机15的输出轴朝隔板5方向与隔板5垂直设置,第二丝杠17同轴焊接于第二电机15输出轴端部,第二移动杆18的上端90
°
弯折形成第二连接部19。在一种实施方式中,第二连接部19可设置为直接与第二丝杠17螺纹配合。在其它实施方式中,也可以是在第二连接部19上过盈配合第二丝杠17螺母,由第二丝杠17螺母与第二丝杠17螺纹配合。第二连接部19上一体成型有第二滑块20,第二滑块20滑动配合于滑槽内,从而在第二丝杠17转动时,第二滑槽21限制具有第二滑块20的第二移动杆18转动,驱使第二移动杆18沿第二丝杠17长度方向移动。第二移动杆18的主体部分与第二支撑板16平行,且第二移动杆18的下端贯穿隔板5至有水区7内。第二移动杆18的位于有水区7的端部与超声换能器4焊接。
52.参照图6,为提高第二移动杆18与隔板5之间的密封性,隔板5上供第二移动杆18穿过的孔上装配有第二密封圈27。
53.上述无接触手持式超声刀使得超声探头3与超声换能器4可分别单独升降调节。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1