一种多通道肌电控制的前臂假肢的制作方法
1.本实用新型涉及医疗器械技术领域,尤其涉及一种多通道肌电控制的前臂假肢。
背景技术:
2.假肢是根据患者残肢条件及经济条件可以装配索控式机械假肢、肌电或开关控制的电动假肢。索控式由机械假手、腕关节机构。接受腔及固定牵引装置构成。这是一种沿用至今的普通上肢假肢。开手的牵引装置通常是采用8字形牵引带拉动牵引索;腕关节机构可以被动屈伸和旋转。现代装配技术使其接受腔的制作得到很大改进:由过去皮革或塑料制的插入式接受腔。利用肘铰链和上臂环带进行悬吊。改为合成树脂抽真空成形制作的全接触接受腔。采用明斯特式接受腔口型。利用肱骨髁和尺骨鹰嘴悬吊。
3.但是现有技术中,现有的前臂假肢在使用时,多需要束带与传感器相连接,将其一起附于患者的手臂肌群部位,而患者自己在使用时,束带与传感器较多,患者单人处理起来较为麻烦,且归拢时束带易脱落,而束带无法进行有效归拢,传感器则有可能脱落,从而影响使用。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,通过环拢结构可对束带进行快速归拢,仅需向右拉动连动杆,卡尺则开始归拢,从而对束带进行快速归拢,解决了患者单人处理束带麻烦的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种多通道肌电控制的前臂假肢,包括联动结构和环拢结构,联动结构的外表面固定安装有固定结构,环拢结构包括圆板,圆板为空心结构,圆板的内表面呈环形转动安装有多个卡尺,圆板的外表面开设有通孔,且通孔的内表面转动连接有连动杆,连动杆延伸至圆板的内表面,连动杆延伸至圆板内表面的一端固定连接有收缩板,且收缩板的外部底面与多个卡尺为转动连接,圆板的前表面开设有环形通孔,环形通孔可使束带穿过,从而使用卡尺对其进行归拢。
6.作为一种优选的实施方式,联动结构的前表面转动连接有假肢本体,联动结构的后表面转动连接有承接结构,承接结构的后表面设置有传感器,联动结构的外表面通过固定结构安装有束带。
7.作为一种优选的实施方式,固定结构包括空心壳,空心壳的内表面两侧均开设有通孔,且两个通孔处均插设有移动杆,移动杆的外表面与通孔的内表面为滑动连接,固定结构共四个,呈矩形分布于联动结构的外表面。
8.作为一种优选的实施方式,移动杆的外表面套设有复位弹簧,复位弹簧远离移动杆的一端固定连接有限位块,限位块的外表面两侧均与空心壳的内表面两侧固定连接。
9.作为一种优选的实施方式,限位块的外表面两侧均与空心壳的内表面两侧固定连接,移动杆的两端分别延伸至空心壳的外部和内部,限位块可对移动杆进行有效限位。
10.作为一种优选的实施方式,移动杆延伸至空心壳内部的一端固定安装有夹持块,
夹持块的内表面开设有通孔,且通孔呈圆形,该通孔为便于对束带进行固定而开设。
11.与现有技术相比,本实用新型的优点和积极效果在于,
12.1、本实用新型中,需要将束带进行归拢时,首先将四条束带顺着圆板的通孔处穿过,随后向右拉动连动杆,随后连动杆带动圆板内表面的收缩板,收缩板带动多个卡尺进行收束,多个卡尺可对四条束带进行有效束缚,而需要将束带取消束缚时,向左拉动连动杆,多个卡尺受到收缩板的力进行牵引,逐渐取消对束带的束缚,通过环拢结构可对束带进行有效归拢,解决了患者无法对束带进行快速归拢的问题。
13.2、本实用新型中,由于束带的物理特性,使用时必然存在损耗,长时间的使用过后则需对其进行更换,需要取下束带进行更换时,首先拉动移动杆,随后移动杆带动夹持块取消对束带的固定,此时逐一拉动移动杆将束带取下即可,需要将新的束带进行安装时,首先将束带穿过夹持块的圆形通孔处,随后拉动束带,束带向外的力带动夹持块,夹持块带动移动杆,移动杆带动复位弹簧发力,随后夹持块逐渐合并,并同时对束带进行夹持,通过固定结构可对束带进行快速拆修与安装。
附图说明
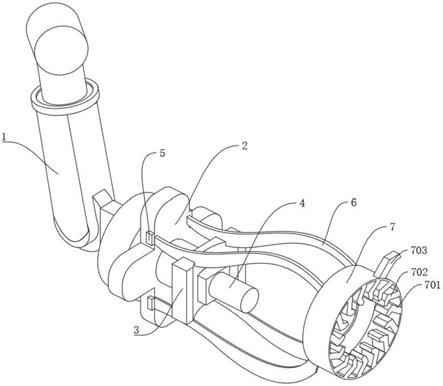
14.图1为本实用新型提出一种多通道肌电控制的前臂假肢的立体图;
15.图2为本实用新型提出一种多通道肌电控制的前臂假肢的立体图;
16.图3为本实用新型提出一种多通道肌电控制的前臂假肢的固定结构剖视立体图。
17.图例说明:
18.1、假肢本体;2、联动结构;3、承接结构;4、传感器;5、固定结构;501、空心壳;502、限位块;503、移动杆;504、复位弹簧;505、夹持块;6、束带;7、环拢结构;701、圆板;702、卡尺;703、连动杆。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例1
21.如图1-3所示,本实用新型提供一种技术方案:一种多通道肌电控制的前臂假肢,包括联动结构2和环拢结构7,联动结构2的外表面固定安装有固定结构5,环拢结构7包括圆板701,圆板701为空心结构,圆板701的内表面呈环形转动安装有多个卡尺702,圆板701的外表面开设有通孔,且通孔的内表面转动连接有连动杆703,连动杆703延伸至圆板701的内表面,连动杆703延伸至圆板701内表面的一端固定连接有收缩板,且收缩板的外部底面与多个卡尺702为转动连接,圆板701的前表面开设有环形通孔,环形通孔可使束带6穿过,从而使用卡尺702对其进行归拢。
22.在本实施例中,需要将束带6进行归拢时,首先将四条束带6顺着圆板701的通孔处穿过,随后向右拉动连动杆703,随后连动杆703带动圆板701内表面的收缩板,收缩板带动多个卡尺702进行收束,多个卡尺702可对四条束带6进行有效束缚,而需要将束带6取消束
缚时,向左拉动连动杆703,多个卡尺702受到收缩板的力进行牵引,逐渐取消对束带6的束缚,通过环拢结构7可对束带6进行有效归拢,解决了患者无法对束带6进行快速归拢的问题。
23.实施例2
24.如图1-3所示,联动结构2的前表面转动连接有假肢本体1,联动结构2的后表面转动连接有承接结构3,承接结构3的后表面设置有传感器4,联动结构2的外表面通过固定结构5安装有束带6,固定结构5包括空心壳501,空心壳501的内表面两侧均开设有通孔,且两个通孔处均插设有移动杆503,移动杆503的外表面与通孔的内表面为滑动连接,固定结构5共四个,呈矩形分布于联动结构2的外表面,移动杆503的外表面套设有复位弹簧504,复位弹簧504远离移动杆503的一端固定连接有限位块502,限位块502的外表面两侧均与空心壳501的内表面两侧固定连接,限位块502的外表面两侧均与空心壳501的内表面两侧固定连接,移动杆503的两端分别延伸至空心壳501的外部和内部,限位块502可对移动杆503进行有效限位,移动杆503延伸至空心壳501内部的一端固定安装有夹持块505,夹持块505的内表面开设有通孔,且通孔呈圆形,该通孔为便于对束带6进行固定而开设。
25.在本实施例中,由于束带6的物理特性,使用时必然存在损耗,长时间的使用过后则需对其进行更换,需要取下束带6进行更换时,首先拉动移动杆503,随后移动杆503带动夹持块505取消对束带6的固定,此时逐一拉动移动杆503将束带6取下即可,需要将新的束带6进行安装时,首先将束带6穿过夹持块505的圆形通孔处,随后拉动束带6,束带6向外的力带动夹持块505,夹持块505带动移动杆503,移动杆503带动复位弹簧504发力,随后夹持块505逐渐合并,并同时对束带6进行夹持,通过固定结构5可对束带6进行快速拆修与安装。
26.本实施例的工作原理:
27.如图1-3所示,首先将传感器4贴至手臂肌群部位,随后将四个束带6依次固定于传感器4的部位,使其归于稳定,待四个束带6全部固定完毕后,则可正常使用前臂假肢。
28.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1