自平衡式轮椅的制作方法
1.本实用新型属于轮椅技术领域,具体涉及一种易于操作、提高轮椅使用安全性、有效保证运行平衡性的自平衡式轮椅。
背景技术:
2.随我国老年化进程的加快,轮椅作为一些身体较差的老年人的出行工具被广泛应用。现有结构的轮椅使用过程中存在的问题是:老人坐轮椅不易保持平衡,并且通过双手推动轮辐实现移动的,容易造成上肢的损伤。一些电动轮椅避免了造成上肢的损伤,但其自身结构原因,平衡性差。
技术实现要素:
3.针对现有技术中存在的上述不足之处,本实用新型提供了一种易于操作、提高轮椅使用安全性、有效保证运行平衡性的自平衡式轮椅。
4.为了解决上述技术问题,本实用新型采用了如下技术方案:
5.一种自平衡式轮椅,包括轮椅本体;其中:所述轮椅本体的下方设置有平衡仪走行系统;
6.所述平衡仪走行系统又包括安装板,该安装板与轮椅本体通过连接柱固定为一体;固定在安装板的底板面上的两台驱动电机,每一台驱动电机的输出轴上连接有一个平衡轮,所述驱动电机与固定在安装板的顶板面上的具有plc控制片的控制器电性连接,该具有plc控制片的控制器与固定在安装板的顶板面上的蓄电池电性连接;固定在安装板的底板面上的陀螺仪与具有plc控制片的控制器电性连接,该陀螺仪用于检测平衡轮运行时的倾角和角速度;
7.所述具有plc控制片的控制器上设置有信号输入操作面板或/和与外部移动终端信号连接的信号收发器。
8.进一步的,所述安装板的底板面上固定有重力加速度传感器,该重力加速度传感器与具有plc控制片的控制器电性连接。
9.再进一步的,所述安装板的底板面上固定有超声波传感器,该超声波传感器与具有plc控制片的控制器电性连接,所述超声波传感器用于检测障碍物。
10.由于上述结构,提高了骑行安全性、便于模块化生产、降低了后期维护成本、利于客户自己装卸左转向灯和右转向灯、或/和行车灯、或/和刹车灯。
附图说明
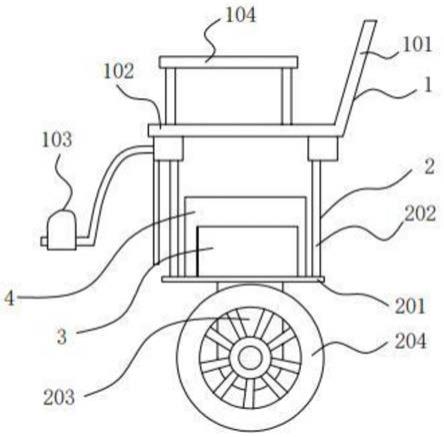
11.图1为本实用新型侧视方向的结构示意图;
12.图2为本实用新型后视方向取下侧板的结构示意图;
13.图3为本实用新型前视方向的结构示意图;
14.图4为本实用新型的控制框图;
15.说明书附图中的附图标记包括:
16.1、轮椅本体;101、背板;102、座板;103、脚踏板;104、扶手;2、平衡仪走行系统;201、安装板;202、连接柱;203、驱动电机;204、平衡轮;205、易于操作、提高轮椅使用安全性、有效保证运行平衡性;3、具有plc控制片的控制器;301、信号输入操作面板;302、信号收发器;4、蓄电池;5、陀螺仪;6、重力加速度传感器;7、超声波传感器;9、外部移动终端。
具体实施方式
17.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明:
18.参见附图1至4,自平衡式轮椅,包括轮椅本体1;其中:所述轮椅本体1的下方设置有平衡仪走行系统2;
19.所述平衡仪走行系统2又包括安装板201,该安装板201与轮椅本体1通过连接柱202固定为一体;固定在安装板201的底板面上的两台驱动电机203,每一台驱动电机203的输出轴上连接有一个平衡轮204,所述驱动电机203与固定在安装板201的顶板面上的具有plc控制片的控制器3电性连接,该具有plc控制片的控制器3与固定在安装板201的顶板面上的蓄电池4电性连接;固定在安装板201的底板面上的陀螺仪5与具有plc控制片的控制器3电性连接,该陀螺仪5用于检测平衡轮204运行时的倾角和角速度;
20.所述具有plc控制片的控制器3上设置有信号输入操作面板301或/和与外部移动终端9信号连接的信号收发器302。在该实施例中,平衡仪走行系统2实际上就是市场销售的平衡车。使用时,通过信号输入操作面板301或外部移动终端9输入命令信息给具有plc控制片的控制器3,具有plc控制片的控制器3从而驱动两台驱动电机203运行,两台驱动电机203控制平衡轮204转动来驱动整个自平衡式轮椅运行,以实现自平衡式轮椅的前进、转弯、加减速和停车功能。
21.为实现智能化运行,上述实施例中,优选地:所述安装板201的底板面上固定有重力加速度传感器6,该重力加速度传感器6与具有plc控制片的控制器3电性连接,所述重力加速度传感器(6)用于检测平衡轮(204)运行时的重力加速度。使用时,通过信号输入操作面板301或外部移动终端9输入命令信息给具有plc控制片的控制器3。陀螺仪5和重力加速度传感器6,用于测量自平衡式轮椅的姿态参数,姿态参数包括俯仰角和俯仰角速度,也就是前后倾斜角度和倾斜角速度;陀螺仪5和重力加速度传感器6将检测的信号反馈给具有plc控制片的控制器3,具有plc控制片的控制器3从而驱动两台驱动电机203运行,两台驱动电机203控制平衡轮204转动来驱动整个自平衡式轮椅运行,以实现自平衡式轮椅的前进、转弯、加减速和停车功能。陀螺仪5采用六轴陀螺仪。
22.为实现自动避障,上述实施例中,优选地:所述安装板201的底板面上固定有超声波传感器7,该超声波传感器7与具有plc控制片的控制器3电性连接,所述超声波传感器7用于检测障碍物。超声波传感器7检测的障碍物信号反馈给具有plc控制片的控制器3,具有plc控制片的控制器3控制自平衡式轮椅减速转弯或停止,实现自动避障目的。
23.为使得整体美观和保护具有plc控制片的控制器3和蓄电池4,上述实施例中,优选地:所述安装板201的四个侧壁固定有与其一体的侧板205,所述安装板201与侧板205和轮椅本体1一体形成具有靠背的箱体结构。
24.为使得轮椅本体1结构简单和易于制造,上述实施例中,优选地:所述轮椅本体1又包括背板101,座板102,所述背板101与座板102的后侧壁固定为一体。
25.为提高使用舒适性,便于放置脚,上述实施例中,优选地:所述座板102的前侧壁上对称设置有两个脚踏板103。
26.为降低使用者的应激反应和保证其使用安全性,上述实施例中,优选地:所述座板102的顶板面上设置对称设置有两个扶手104。在该实施例中,使用者一般行动不便的老年人或残疾人。
27.上述所有实施例中所述部件均为市场销售产品。有关程控的描述是为了本领域技术人员理解本实用新型所述技术方案,不是本技术方案欲保护的发明点。
28.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1