用于神经受损恢复的运动装置的制作方法
1.本实用新型涉及运动设备技术领域,特别是一种用于神经受损恢复的运动装置。
背景技术:
2.基于超声波或者基于偏心电机的运动机(同属于振动运动机),主要工作原理是利用内部超声波发生器发出的高频振荡信号、经换能器转换成高频机械振荡产生振动,或者通过电机偏心轮带动设备产生振动,然后经设备上端的振动板(位于外壳体上端)作用于人体,通过对人体的全身振动,能刺激人体骨内、神经、血液等,对因为脑中风产生的后遗症、帕金森症、小儿麻痹、骨质疏松、三高、关节骨痛、术后恢复等有较为有效的作用,也能起到一定的强身健体作用。
3.现有的振动运动机虽然具有较多的优点,但是无法在人手部神经受到损坏后促进其恢复的功能(比如病人手部骨折打石膏时间较长后,手部神经由于长时间没有运动神经会萎缩,需要病人自己不断运动手臂的肘关节,使手臂的神经得到拉升锻炼,逐渐恢复正常),人为锻炼属于主动锻炼,会给病人带来一定不便,有些病人往往不能坚持锻炼,造成康复的延迟,不利于病情的康复。随着工业技术的发展,相同产品的竞争越来越大,提供以人为本功能的产品无疑是取得市场先机的重要手段。综上所述,提供一种不但具有普通振动运动机的功能,且还能为使用者提供手部神经恢复功能的运动装置显得尤为必要。
技术实现要素:
4.为了克服现有的振动运动机由于结构所限,无法为使用者提供平衡锻炼功能的弊端,本实用新型提供了基于振动运动机本体,主要应用于健身房或康复医疗机构使用,应用中,在相关机构及电路等共同作用下,不但能为使用者提供振动运动的功能,还能通过不断前后往复运动的活动机构训练人的手臂沿肘部运动,进而使得手部神经能得到有效恢复锻炼的用于神经受损恢复的运动装置。
5.本实用新型解决其技术问题所采用的技术方案是:
6.用于神经受损恢复的运动装置,包括振动运动机本体、稳压电源、调速器、电源开关、电动直线滑台;其特征在于还具有锻炼机构、控制电路;所述锻炼机构包括横连接管和弯曲设备,弯曲设备有相同的两套,每套弯曲设备包括电机减速机构、壳体、固定臂、连接臂,壳体的前侧端有导向槽,电机减速机构安装在壳体内下端,电机减速机构的动力输出轴安装有连动杆,固定臂的内侧安装在连动杆的外侧端,连接臂的外侧安装在壳体的内侧;所述振动运动机本体的支撑架前端有滑槽,电动直线滑台安装在支撑架前端内,横连接管安装在滑动块前端;所述横连接管的后端两侧分别具内螺纹丝座、螺杆;两套弯曲设备的连接臂内侧端分别套在横连接管两端内且经螺杆固定;所述稳压电源、调速器、控制电路、第二只电源开关安装在振动运动机本体的支撑架内,第一只电源开关安装在振动运动机本体的壳体上端前;所述调速器的电源输出端和控制电路的电源输入端电性连接,控制电路的电源输出端和两套弯曲设备的电机减速机构电源输入端电性连接;所述第二只电源开关的电
源输出端和电动直线滑台的电源输入端电性连接。
7.进一步地,所述横连接管的后侧端和支撑架前端间隔距离。
8.进一步地,所述横连接管、壳体、连接臂和固定臂处于横向水平状态下时,前端横向处于同一平面。
9.进一步地,所述横连接管、壳体、连接臂和固定臂前端安装有胶垫,固定臂的前端安装有套环。
10.进一步地,所述控制电路包括两只时控开关,两只时控开关的电源输入两端分别电性连接。
11.本实用新型有益效果是:本新型振动运动机本体,主要应用于健身房或康复医疗结构使用,具有普通振动运动机的所有功能。本新型不但能为使用者提供振动运动的功能,使用者还可根据需要选用锻炼一只或两只手臂的功能,通过第二只电源开关能控制电动直线滑台带动锻炼机构上升或下降高度,通过调节连接臂和横连接管之间的间距,能满足不同身高及不同手臂长度的人锻炼使用。应用中,在控制电路等共同作用下,两套或一套弯曲设备能不断前后往复运动的活动机构训练人的手臂沿肘部运动,进而使得手部神经能得到有效恢复锻炼。由于本新型能在振动模式下同步锻炼使用者的手部神经能力,因此给使用者带来了便利,能起到更好的锻炼效果,且提高了产品的档次,并提高了产品市场竞争力。基于上述,本实用新型具有好的应用前景。
附图说明
12.以下结合附图和实施例将本实用新型做进一步说明。
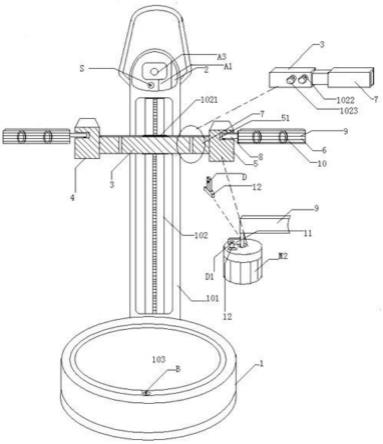
13.图1是本实用新型整体及局部放大结构示意图。
14.图2是本实用新型电路图。
具体实施方式
15.图1、2所示,用于神经受损恢复的运动装置,包括振动运动机本体1、稳压电源a1、调速器a3、电源开关s及b、电动直线滑台m(型号rsb110,工作电压直流24v、功率260w);还具有锻炼机构、控制电路2;所述锻炼机构包括矩形横连接管3和弯曲设备4,弯曲设备4有相同的两套,每套弯曲设备4包括电机减速机构m2(同轴电机齿轮减速器成品,工作电压交流220v、功率150w)、壳体5、固定臂6、连接臂7,壳体5的前侧端到外侧端中部之间有一个矩形导向槽51,电机减速机构m2垂直分布其壳体下端经螺杆螺母安装在壳体5内下端中部,电机减速机构m2的动力输出轴上端横向焊接一只连动杆8,连动杆8中部位于导向槽51内且外侧位于壳体5的外侧部,矩形固定臂6的内侧焊接在连动杆8的外侧端,矩形连接臂7的外侧焊接在壳体5的内侧端中部;所述振动运动机本体的支撑架101前端中部有一个由上至下分布的矩形滑槽102,电动直线滑台m垂直分布经螺杆螺母安装在支撑架101前端内、且电动直线滑台的滑动块1021前部位于支撑架前端外,横连接管3横向分布其后端中部经螺杆螺母安装在滑动块1021前端;所述横连接管3的后端左右两侧分别具有两个内螺纹丝座1022,每个丝座内旋入有一只螺杆1023;两套弯曲设备的连接臂7内侧端分别套在横连接管3两侧内且经旋紧螺杆1023固定;所述稳压电源a1、调速器a3、控制电路2、第二只电源开关s安装在振动运动机本体的支撑架101前上端内、且调速器a3的调节旋钮、第二只电源开关s的操作手
柄位于支撑架101前上端外。第一只电源开关b安装在振动运动机本体1的壳体上端前中部,且电源开关b的按钮位于壳体上端开孔外。
16.图1、2所示,横连接管3的后侧端和支撑架101前端间隔一定距离,电动直线滑台的滑动块1021和丝杆之间连接的丝座前左右宽度小于滑槽102左右宽度。横连接管3、壳体5、连接臂7和固定臂6处于横向水平状态下时,前端横向处于同一平面。横连接管3、壳体4、连接臂5和固定臂6前侧端用胶粘接有橡胶垫9(缓冲作用,为人手臂接触后起到舒适的感觉),固定臂6的前端左右两部安装有两只套环10。每套弯曲设备的电机减速机构的动力输出轴左侧下端横向焊接一只限位板11,电机减速机构的壳体上端左中部及后端中部分别焊接有一只固定座12,左端固定座12后端、后端固定座12的左端分别用胶粘接安装有一只按钮式常闭触点微动开关d1及d,且左端固定座的微动开关d1按钮位于后端、右端固定座的左部微动开关d按钮位于左端;固定臂6横向处于一条直线时,限位板11前端顶住左端微动开关d1按钮其内部触点开路,固定臂6纵向处于一条直线时,限位板11后端顶住后端微动开关d按钮其内部触点开路。
17.图1、2所示,稳压电源a1是型号220v转直流48v、输出功率2kw的开关电源模块成品。控制电路包括两只时控开关a2及a,两只时控开关a2及a的电源输入两端1及2脚分别经导线连接;时控开关a2及a是型号kg316t的全自动微电脑时控开关成品,微电脑时控开关自身有显示屏及多个设置按键,并具有两个电源输入端1、2脚,两个电源输出端3、4脚,使用者分别按动操作多只按键(按键前端位于支撑架前端外,可设定两个电源输出端输出电源的间隔时间和每次输出电源的时间。两只微动开关d1及d分别经导线串联在第一套时控开关a正极电源输出端3脚和两套电机减速机构m2的其中一个电源输入端之间,以及第二套时控开关a2正极电源输出端3脚和两套电机减速机构m2的另一个电源输入端之间,第一套电机减速机构m2的正负两极电源输入端和第二套电机减速机构m2的负正连接电源输入端经导线连接。稳压电源a1的电源输入端1及2脚和交流220v电源两极分别经导线连接;稳压电源a1的电源输出端正极3脚和第一只电源开关b一端、第二只电源开关s一端1脚经导线连接;第一只电源开关b另一端、稳压电源a1的负极电源输出端4脚和调速器a3的电源输入端1及2脚分别经导线连接;调速器a3的电源输出端3及4脚和控制电路的电源输入端时控开关a的1及2脚分别经导线连接;稳压电源a1的负极电源输出端4脚和第二只电源开关s另一端2脚经导线连接,控制电路的电源输出端时控开关a及a2的3、4脚和两套弯曲设备的电机减速机构m2正负及负正两极电源输入端分别经导线连接;第二只电源开关s的电源输出端3、4、脚及5、6脚分别和电动直线滑台m的正负及负正两极电源输入端经导线连接。
18.图1、2所示,本新型基于振动运动机本体1,主要应用于健身房或康复医疗机构使用,具有普通振动运动机的所有功能。本新型其余使用方法及过程和现有振动运动机完全一致,振动运动机本体1得电后,利用内部超声波发生器发出的高频振荡信号、经换能器转换成高频机械振荡产生振动,或者通过电机偏心轮带动设备产生振动,然后经设备上端的振动板103(也就是壳体上部)作用于人体,通过对人体的全身振动、达到锻炼效果,并起到一定的强身健体作用。220v交流电源进入稳压电源a1的1及2脚后,稳压电源a1在其内部电路作用下3及4脚会输出稳定的直流48v电源进入电源开关s及电源开关b、调速器a3的电源输入端(电源开关b打开的前提下)。当使用者需要单独锻炼一只或两只手臂的神经功能,或者结合振动运动时(不需要振动运动就关闭振动运动机本体1的电源),使用者预先根据自
己身高向左或向右打开电源开关s,电源开关s向左打开时其1、2脚和3、4脚分别连通,这样电动直线滑台m的电机正负两极得电滑动块会带到锻炼机构上升,高度到后关闭电源开关s;电源开关s向右打开时其1、2脚和5、6脚分别连通,这样电动直线滑台m的电机负正两极得电滑动块会带到锻炼机构下降,高度到后关闭电源开关s;总之高度满足使用者站在振动运动机本体的振动板103上后,两手和固定臂6横向接近水平就可。然后使用者根据自己手臂长度松开螺杆1023,把两套弯曲设备的连接臂7向外拉动或向内推动并经螺杆1023固定,满足使用者手肘部刚好接近位于壳体5的外侧。调节好后,使用者背对站在振动运动机本体的振动板103上,将一只或两只手套在其中一套弯曲设备或两套弯曲设备的布质套环10内,接着用脚踩一下自锁按钮式第一只电源开关b,电源开关b内部触点闭合,进而控制电路得电工作。
19.图1、2所示,控制电路得电工作,时控开关a得电工作后在其内部电路及技术人员设定的3及4脚输出电源时间作用下会先循环输出一定时间电源,然后每间隔一定时间输出一定时间电源(比如循环先输出8秒钟电源,然后每间隔8秒钟输出8秒钟电源)进入两套弯曲设备的两套电机减速机构m2正负两极电源输入端,两套电机减速机构m2得电的时间内其动力输出轴经连动杆8带动固定臂6及人的小臂沿手肘部关节向前运动。时控开关a2得电工作后在其内部电路及技术人员设定的3及4脚输出电源时间作用下会循环间隔一定时间,然后每间隔一定时间输出一定时间电源(比如循环间隔8秒钟,然后每间隔8秒钟输出8秒钟电源)进入两套弯曲设备的两套电机减速机构m2负正两极电源输入端,两套电机减速机构m2得电的时间内其动力输出轴经连动杆8带动固定臂6及人的小臂沿手肘部关节向后运动。通过上述,本新型就能循环不间断带动人的小手臂沿手肘关节前后不断运动,达到练习手部神经的效果,进而使得手部神经能得到有效恢复锻炼。由于本新型能在振动模式下同步锻炼使用者的手部神经能力,因此给使用者带来了便利,能起到更好的锻炼效果,且提高了产品的档次,并提高了产品市场竞争力。
20.图1、2所示,本新型调节调速器a3的输出电源大小可调节两套电机减速机构m2带动固定臂6及人的小臂沿手肘部关节向前后运动速度及距离(包括角度),调速器a3的输出电压调节得相对高时,那么固定臂6及人的小臂沿手肘部关节向前后运动速度及距离(包括角度)相对大,调速器a3的输出电压调节得相对低时,那么固定臂6及人的小臂沿手肘部关节向前后运动速度及距离(包括角度)相对小,具体速度和高度使用者根据自身需要调节,能达到个性化需要。不需要锻炼手部弯曲功能时,使用者再次用脚踩下电源开关b的按钮,于是电源开关b内部触点开路,控制电路失电不再工作,那么两套弯曲设备的电机减速机构也会失电,使用者从布质套环10内取下手臂就可。本新型中,当人手臂及固定臂向前运动到接近90度时,限位板11后端压住电源开关d的按钮其内部触点开路,由于,微动电源开关d两个接线端分别经导线串联在第一套时控开关a正极电源输出端3脚和两套电机减速机构m2的一个电源输入端之间,所以此刻,两套电机减速机柜会自动失电,防止转动角度过大给人带来不适。当人手臂及固定臂向后运动到接近直线时,限位板11前端压住电源开关d1的按钮其内部触点开路,由于,微动电源开关d1(常闭触点)两个接线端分别经导线串联在第二套时控开关a2正极电源输出端3脚和两套电机减速机构m2的另一个电源输入端之间,所以此刻,两套电机减速机柜会自动失电,防止转动角度过大给人带来不适。电路中,调速器a4是dc-dc的直流电压调节模块(型号xh-m401)、输出功率1kw(输入48v、输出0-48v)。
21.需要说明的是,对于本领域技术人员而言,显然本实用新型限于上述示范性实施例的细节,而且在不背离本本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
22.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1