一种针对扶手进行全自动消杀的装置的制作方法
1.本实用新型涉及公共卫生技术领域,尤其是涉及一种针对扶手进行全自动消杀的装置。
背景技术:
2.在现有技术中,随着人类社会的不断发展和研究探索,越来越多的病毒细菌被人类发现,同时有些病毒细菌已经在人类之间传播,严重影响了人类的生命安全,且同时随着人类的活动范围逐渐扩大,也加速了病毒在人类之间的传播,因此急切需要一款设备可以对人们接触过的地方进行及时消杀,在病毒开始传播之前将其杀灭,特别在一些社会福利院,养老院等一些人流量很大的公共场所,这些场所为了人们行动的方便,会在一些通道处增加扶手,同时不同的人群都会不经意的与扶手接触,当扶手上有细菌病毒时,便会通过接触进行传播,特别当出现重度传染性疾病时,对扶手的定时、定量、全面消杀工作至关重要,现有技术中对扶手的清洁主要以人工擦拭为主,而且还不能做到定时、定量、全覆盖式消杀,导致消杀不及时和不彻底,而采用机器喷雾消杀和移动消杀机器人进行消杀的消杀方式均存在消杀死角且也不能做到及时快速的消杀等问题,因此需要一种针对扶手的消杀方法和设备,使其可以对扶手定时、定量、全覆盖式消杀。
3.申请号为:202010677878.4的中国发明专利公开了一种自动扶梯的扶手消毒装置的消毒液擦涂机构,属于公共卫生技术领域。它解决了现有自动扶梯消毒不彻底等技术问题。该自动扶梯的扶手消毒装置包括固定有储液箱的外壳,消毒液擦涂机构包括安装在外壳的消毒腔内靠近后端处且由外向内依次设置的喷嘴架和擦拭架,喷嘴架上设有若干个喷嘴,擦拭架上固定有擦拭件,擦拭件包括呈条形的直条段和两条与扶手的两端匹配的弧形段,储液箱和喷嘴之间设有能通过扶手移动作为驱动源来实先将储液箱中的消毒液抽出并输送至喷嘴中喷洒出去的抽液机构。然而该种自动扶梯的扶手消毒装置的消毒液擦涂机构结构较为复杂,其只能针对自动扶梯进行消毒,无法带动设备对扶手进行自动消杀,其无法对消杀区域进行全覆盖,导致存在消杀死角,无法保证擦拭组件始终与扶手贴合,消杀效果较差,其无法实现对扶手的定时、定量消杀任务以及紧急避险的作用。
技术实现要素:
4.本实用新型的目的是提供一种针对扶手进行全自动消杀的装置。
5.为实现上述目的,本实用新型提出的技术方案是:
6.一种针对扶手进行全自动消杀的装置,包括外壳,所述外壳设置在扶手一侧,所述外壳对应所述扶手设有开口且所述外壳通过开口与所述扶手搭接,还包括用于带动设备沿着所述扶手运动的运动控制组件、用于对所述扶手进行紫外消杀的紫外消杀组件、用于对所述扶手进行擦拭清洁的擦拭清洁组件以及监测设备周围环境信息的传感器系统组件,运动控制组件位于所述外壳内部靠近所述扶手的一侧,紫外消杀组件位于所述外壳内部且位于所述扶手上下两方,擦拭清洁组件位于所述外壳开口处且位于所述外壳与所述扶手之
间,传感器系统组件对应所述扶手位于所述外壳一侧。
7.运动控制组件包括安装板、驱动电机、主动轮机构以及驱动皮带,所述安装板设置在所述外壳内部靠近所述扶手的一侧且与所述外壳固定连接,所述驱动电机设置在所述安装板远离所述扶手的一侧且与所述安装板固定连接,所述驱动电机的输出端贯穿所述安装板朝向所述扶手设置,主动轮机构对应所述驱动电机的输出端设置在所述安装板靠近所述扶手的一侧,所述驱动皮带环绕设置在所述驱动电机的输出端以及主动轮机构外侧,主动轮机构通过所述驱动皮带与所述驱动电机的输出端传动连接。
8.主动轮机构包括主动轴以及主动轮毂,所述主动轴有两个,两个所述主动轴并排设置在所述安装板靠近所述扶手的一侧上部且其一端与所述安装板转动连接,所述主动轴与所述安装板转动连接的一端通过所述驱动皮带与所述驱动电机传动连接,所述主动轴位于所述外壳设有开口处的上方,所述主动轮毂对应两个所述主动轴有两个,两个所述主动轮毂分别设置在两个所述主动轴远离其与所述安装板转动连接的一端且与对应的所述主动轴固定连接,所述主动轮毂与所述扶手搭接,所述主动轮毂远离所述主动轴的一端设有挡板,所述主动轮毂通过所述挡板与所述扶手卡接。
9.还包括辅助轮机构,辅助轮机构包括辅助支架、辅助轴以及辅助轮毂,所述辅助支架对应两个主动轴有两个,两个所述辅助支架并排设置在所述安装板靠近所述扶手的一侧中部且与所述安装板固定连接,两个所述辅助支架分别位于两个主动轴下方,所述辅助轴对应两个所述辅助支架有两个,两个所述辅助轴分别设置在两个所述辅助支架靠近所述扶手的一端底部且其上端与对应的所述辅助支架转动连接,所述辅助轮毂对应两个所述辅助轴有两个,两个所述辅助轮毂分别设置在两个所述辅助轴的下端且与对应的所述辅助轴固定连接,所述辅助轮毂与所述扶手抵接。
10.紫外消杀组件包括紫外灯座以及uvc紫外灯,所述紫外灯座有两组,两组所述紫外灯座分别设置在安装板靠近所述扶手的一侧上部以及下部,所述紫外灯座与安装板固定连接,所述uvc紫外灯对应两组所述紫外灯座有两组,两组所述uvc紫外灯分别设置在两组所述紫外灯座靠近所述扶手的一侧且与对应的所述紫外灯座固定连接,两组所述uvc紫外灯分别位于所述扶手的上方以及下方。
11.擦拭清洁组件包括擦拭基座、擦拭轴、擦拭弹簧以及擦拭刮片,所述擦拭基座有两组,两组所述擦拭基座分别设置在所述外壳开口处两侧,两组所述擦拭基座与所述外壳固定连接,所述擦拭轴对应两组所述擦拭基座有两组,两组所述擦拭轴分别设置在两组所述擦拭基座靠近所述扶手的一侧且与对应的所述擦拭基座固定连接,所述擦拭弹簧对应两组所述擦拭轴有两组,两组所述擦拭弹簧分别套设在两组所述擦拭轴中部,所述擦拭刮片对应两组所述擦拭轴有两组,两组所述擦拭刮片分别套设在两组所述擦拭轴上且通过两组所述擦拭弹簧与对应的所述擦拭轴弹性连接,两组所述擦拭刮片均与所述扶手弹性抵接。
12.传感器系统组件包括人体红外传感器、激光避障传感器以及防跌落传感器,所述人体红外传感器有两组,两组所述人体红外传感器分别设置在所述外壳靠近所述扶手的一端两侧且与所述外壳固定连接,两组所述人体红外传感器位于所述扶手上方,所述激光避障传感器有两组,两组所述激光避障传感器分别设置在所述外壳靠近所述扶手的一端两侧且与所述外壳固定连接,两组所述激光避障传感器位于所述扶手下方,所述防跌落传感器有两组,两组所述防跌落传感器对应所述扶手分别设置在所述外壳开口处上部两侧且与所
述外壳固定连接。
13.还包括主控系统盒,所述主控系统盒设置在安装板靠近所述扶手的一侧下部且与安装板固定连接,所述主控系统盒与驱动电机、uvc紫外灯、人体红外传感器、激光避障传感器以及防跌落传感器均电性连接。
14.还包括显示屏,所述显示屏设置在所述外壳远离所述扶手的一侧上部且与所述外壳固定连接,所述显示屏与所述主控系统盒电性连接,所述外壳上还设有启动按钮以及急停按钮。
15.还包括锂电池,所述锂电池设置在安装板远离所述扶手的一侧下部且与安装板固定连接,所述锂电池与所述主控系统盒电性连接。
16.本实用新型的有益效果是:
17.设有运动控制组件,可带动设备对扶手进行自动消杀,无需人工干扰即可完成每次消杀任务,设有紫外消杀组件,采用uvc紫外灯对扶手进行消杀,可对消杀区域进行全覆盖,避免存在消杀死角,设有擦拭清洁组件,可配合紫外消杀组件对扶手进行擦拭消杀,提升消杀效果,设有传感器系统组件,可以实现对扶手的定时、定量消杀任务以及紧急避险的作用。
附图说明
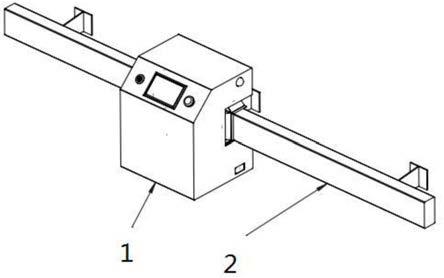
18.图1是本实用新型整体结构示意图;
19.图2是本实用新型运动控制组件与外壳爆炸示意图;
20.图3是本实用新型运动控制组件结构示意图;
21.图4是本实用新型安装板与驱动电机配合示意图;
22.图5是本实用新型擦拭清洁组件结构示意图;
23.图6是本实用新型传感器系统组件与外壳爆炸示意图;
24.图7是本实用新型电性连接图;
25.图8是本实用新型消杀过程流程图。
26.图中:1、外壳;2、扶手;3、安装板;4、驱动电机;5、主动轮机构;6、驱动皮带;7、主动轴;8、主动轮毂;9、挡板;10、辅助支架;11、辅助轴;12、辅助轮毂;13、紫外灯座;14、uvc紫外灯;15、擦拭基座;16、擦拭轴;17、擦拭弹簧;18、擦拭刮片;19、人体红外传感器;20、激光避障传感器;21、防跌落传感器;22、主控系统盒;23、显示屏;24、锂电池。
具体实施方式
27.下面结合附图对本实用新型作进一步详细描述,
28.一种针对扶手进行全自动消杀的装置,包括外壳1,外壳1设置在扶手2一侧,外壳1对应扶手2设有开口且外壳1通过开口与扶手2搭接,还包括用于带动设备沿着扶手2运动的运动控制组件、用于对扶手2进行紫外消杀的紫外消杀组件、用于对扶手2进行擦拭清洁的擦拭清洁组件以及监测设备周围环境信息的传感器系统组件,运动控制组件位于外壳1内部靠近扶手2的一侧,紫外消杀组件位于外壳1内部且位于扶手2上下两方,擦拭清洁组件位于外壳1开口处且位于外壳1与扶手2之间,传感器系统组件对应扶手2位于外壳1一侧,本实用新型整体结构示意图如图1所示。
29.运动控制组件包括安装板3、驱动电机4、主动轮机构5以及驱动皮带6,安装板3设置在外壳1内部靠近扶手2的一侧且与外壳1固定连接,驱动电机4设置在安装板3远离扶手2的一侧且与安装板3固定连接,驱动电机4的输出端贯穿安装板3朝向扶手2设置,主动轮机构5对应驱动电机4的输出端设置在安装板3靠近扶手2的一侧,驱动皮带6环绕设置在驱动电机4的输出端以及主动轮机构5外侧,主动轮机构5通过驱动皮带6与驱动电机4的输出端传动连接,运动控制组件通过安装板3、驱动电机4、主动轮机构5以及驱动皮带6配合,带动设备沿着扶手2运动,其中,安装板3用于为运动控制组件、紫外消杀组件、主控系统盒22以及锂电池24提供安装支撑,驱动电机4用于带动主动轮机构5转动,主动轮机构5用于在驱动电机4的作用下带动设备沿着扶手2运动,驱动皮带6用于连接驱动电机4的输出端以及主动轮机构5,起到传动的作用,本实用新型运动控制组件与外壳1爆炸示意图如图2所示。
30.本实用新型运动控制组件结构示意图如图3所示,主动轮机构5包括主动轴7以及主动轮毂8,主动轴7有两个,两个主动轴7并排设置在安装板3靠近扶手2的一侧上部且其一端与安装板3转动连接,主动轴7与安装板3转动连接的一端通过驱动皮带6与驱动电机4传动连接,主动轴7位于外壳1设有开口处的上方,主动轮毂8对应两个主动轴7有两个,两个主动轮毂8分别设置在两个主动轴7远离其与安装板3转动连接的一端且与对应的主动轴7固定连接,主动轮毂8与扶手2搭接,主动轮毂8远离主动轴7的一端设有挡板9,主动轮毂8通过挡板9与扶手2卡接,主动轮机构5通过主动轴7以及主动轮毂8配合,在驱动电机4的作用下带动设备沿着扶手2移动,其中,主动轴7用于为主动轮毂8提供安装支撑,主动轮毂8用于在驱动电机4的作用下带动设备沿着扶手2移动,挡板9用于防止运动过程中设备与扶手2之间出现脱离现象,防止设备脱落,本实用新型安装板3与驱动电机4配合示意图如图4所示。
31.还包括辅助轮机构,辅助轮机构包括辅助支架10、辅助轴11以及辅助轮毂12,辅助支架10对应两个主动轴7有两个,两个辅助支架10并排设置在安装板3靠近扶手2的一侧中部且与安装板3固定连接,两个辅助支架10分别位于两个主动轴7下方,辅助轴11对应两个辅助支架10有两个,两个辅助轴11分别设置在两个辅助支架10靠近扶手2的一端底部且其上端与对应的辅助支架10转动连接,辅助轮毂12对应两个辅助轴11有两个,两个辅助轮毂12分别设置在两个辅助轴11的下端且与对应的辅助轴11固定连接,辅助轮毂12与扶手2抵接,辅助轮机构通过辅助支架10、辅助轴11以及辅助轮毂12配合,配合主动轮机构5带动设备沿着扶手2运动,其中,辅助支架10用于为辅助轴11提供安装支撑,辅助轴11用于为辅助轮毂12提供安装支撑,辅助轮毂12用于配合主动轮机构5带动设备沿着扶手2运动。
32.紫外消杀组件包括紫外灯座13以及uvc紫外灯14,紫外灯座13有两组,两组紫外灯座13分别设置在安装板3靠近扶手2的一侧上部以及下部,紫外灯座13与安装板3固定连接,uvc紫外灯14对应两组紫外灯座13有两组,两组uvc紫外灯14分别设置在两组紫外灯座13靠近扶手2的一侧且与对应的紫外灯座13固定连接,两组uvc紫外灯14分别位于扶手2的上方以及下方,位于下方的一组紫外灯座13由两个紫外灯座13组成,位于下方的一组uvc紫外灯14由两个uvc紫外灯14组成,紫外消杀组件通过紫外灯座13以及uvc紫外灯14配合,对扶手2进行紫外光消杀,其中,紫外灯座13用于为uvc紫外灯14提供安装支撑,uvc紫外灯14用于对扶手2进行紫外光消杀。
33.擦拭清洁组件包括擦拭基座15、擦拭轴16、擦拭弹簧17以及擦拭刮片18,擦拭基座15有两组,两组擦拭基座15分别设置在外壳1开口处两侧,两组擦拭基座15与外壳1固定连
接,擦拭轴16对应两组擦拭基座15有两组,两组擦拭轴16分别设置在两组擦拭基座15靠近扶手2的一侧且与对应的擦拭基座15固定连接,擦拭弹簧17对应两组擦拭轴16有两组,两组擦拭弹簧17分别套设在两组擦拭轴16中部,擦拭刮片18对应两组擦拭轴16有两组,两组擦拭刮片18分别套设在两组擦拭轴16上且通过两组擦拭弹簧17与对应的擦拭轴16弹性连接,两组擦拭刮片18均与扶手2弹性抵接,擦拭基座15、擦拭轴16、擦拭弹簧17以及擦拭刮片18对应扶手2环设在外壳1开口处,擦拭清洁组件通过擦拭基座15、擦拭轴16、擦拭弹簧17以及擦拭刮片18配合,对扶手2进行擦拭清洁并保证擦拭刮片18与扶手2外表面紧密贴合,其中,擦拭基座15用于为擦拭轴16提供安装支撑,擦拭轴16用于为擦拭弹簧17提供安装支撑,擦拭弹簧17用于为擦拭刮片18与擦拭轴16连接的一侧提供弹性支撑,擦拭刮片18用于在擦拭弹簧17的作用下与扶手2外表面紧密贴合并对扶手2进行擦拭清洁,本实用新型擦拭清洁组件结构示意图如图5所示。
34.传感器系统组件包括人体红外传感器19、激光避障传感器20以及防跌落传感器21,人体红外传感器19有两组,两组人体红外传感器19分别设置在外壳1靠近扶手2的一端两侧且与外壳1固定连接,两组人体红外传感器19位于扶手2上方,激光避障传感器20有两组,两组激光避障传感器20分别设置在外壳1靠近扶手2的一端两侧且与外壳1固定连接,两组激光避障传感器20位于扶手2下方,防跌落传感器21有两组,两组防跌落传感器21对应扶手2分别设置在外壳1开口处上部两侧且与外壳1固定连接,传感器系统组件通过人体红外传感器19、激光避障传感器20以及防跌落传感器21配合,对设备周围环境信息进行监测,其中,人体红外传感器19用于检测和统计人体接触扶手2的次数,激光避障传感器20用于检测设备前进方向的障碍物,防跌落传感器21用于防止设备脱离扶手2,本实用新型传感器系统组件与外壳1爆炸示意图如图6所示。
35.还包括主控系统盒22,主控系统盒22设置在安装板3靠近扶手2的一侧下部且与安装板3固定连接,主控系统盒22与驱动电机4、uvc紫外灯14、人体红外传感器19、激光避障传感器20以及防跌落传感器21均电性连接,本实用新型电性连接图如图7所示。
36.还包括显示屏23,显示屏23设置在外壳1远离扶手2的一侧上部且与外壳1固定连接,显示屏23与主控系统盒22电性连接,外壳1上还设有启动按钮以及急停按钮,其中,显示屏23用于显示设备信息并可通过显示屏23对设置消杀定时和定量的数据,启动按钮用于启动设备,急停按钮用于对设备进行紧急停机。
37.还包括锂电池24,锂电池24设置在安装板3远离扶手2的一侧下部且与安装板3固定连接,锂电池24与主控系统盒22电性连接,其中,锂电池24用于为设备提供电力支撑。
38.其中,主动轴7以及辅助轴11通过轴承分别与安装板3以及辅助支架10转动连接。
39.其中,主动轮机构5、辅助轮机构以及紫外消杀组件的数量可根据实际使用需求进行增设或减设。
40.其中,可在擦拭刮片18上增设抹布,以便提升擦拭效果。
41.一种针对扶手2进行全自动消杀的方法,其包括上述针对扶手2进行全自动消杀的装置以及手持移动终端,手持移动终端内部设有后台数据管理系统,针对扶手2进行全自动消杀的装置与手持移动终端无线连接,其包括如下步骤:
42.a、将针对扶手2进行全自动消杀的装置通过外壳1上设置的开口安装至扶手2上,并选择扶手2上的某个位置作为起点,启动装置,通过外壳1上设置的显示屏23设置消杀定
时和定量的数据,设置完成后设备进入待机模式;
43.b、针对扶手2进行全自动消杀的装置按照设置好的定时数据和定量数据开始计时和统计;
44.c、当在第一个消杀周期内人体触摸扶手2的次数达到预设值且未到消杀周期时间,则开启uvc紫外灯14,开始对整个扶手2进行消杀,消杀完成后,针对扶手2进行全自动消杀的装置回到起点位置,关闭uvc紫外灯14,开始进行一个新消杀周期的倒计时;
45.d、当在第一个消杀周期到达时且人体接触扶手2的统计次数未达到预设值,则按照定时数据进行消杀,消杀完成后,针对扶手2进行全自动消杀的装置回到起点位置,关闭uvc紫外灯14,开始进行一个新消杀周期的倒计时;
46.e、当针对扶手2进行全自动消杀的装置在扶手2上执行紫外灯消杀工作时,擦拭清洁组件随着设备的运动会在扶手2表面对扶手2进行擦拭清洁。
47.本实用新型消杀过程流程图如图8所示。
48.其中,定量消杀的优先级高于定时消杀。
49.其中,紫外灯消杀过程按照《消毒技术规范》的要求对扶手2进行消杀。
50.其中,擦拭清洁组件可根据使用需求安装带有消毒液的抹布。
51.工作原理:
52.装有后台数据管理系统的手持移动终端可以控制设备和实时查看扶手2的消杀状态,统计消杀数据,使消杀数据可视化,可量化,针对扶手2进行全自动消杀的装置为一个具有通讯功能的专业消杀设备,消杀功能的实现是通过其内部的uvc紫外灯14完成的,uvc紫外灯14是消杀工作的重要部分,在扶手2上实现移动消杀是由运动控制组件完成运动控制的,主控系统盒22控制驱动电机4带动主动轮机构5运动,实现设备在扶手2轨道上行走,达到对整个扶手2进行消杀的目的,在运动过程中,设备的两侧装有擦拭清洁组件,擦拭清洁组件通过其弹性结构实现擦拭刮片18或抹布与扶手2外表面紧密贴合,在运动的过程中实现对扶手2表面清洁的目的,传感器系统组件包含人体红外传感器19、激光避障传感器20以及防跌落传感器21,其中,人体红外传感器19用于检测和统计人体接触扶手2的次数,当检测统计的人体接触次数达到系统预设次数值时,设备将会对整个扶手2进行消杀,即实现了对扶手2的定量消杀,其中,设备还具有了定时消杀的功能,即当一个定时消杀周期内,没有达到定量消杀的数值,扶手2消杀装置会执行定时消杀,定时消杀和定量消杀为互补的,定量消杀优先于定时消杀,当执行完一个定量消杀后,开始计时定时周期,在一个周期内,若没有达到定量消杀的数值,则到定时消杀周期时执行定时消杀任务,否则执行定量消杀,整个过程以此类推,防跌落传感器21的作用是防止扶手2消杀装置脱离扶手2,造成装置损坏,激光避障传感器20用于检测装置前进方向的障碍物,使装置及时刹车,通过传感器系统组件,可以实现对扶手2的定时,定量消杀任务及紧急避险的作用。
53.本实用新型的有益效果是设有运动控制组件,可带动设备对扶手进行自动消杀,无需人工干扰即可完成每次消杀任务,设有紫外消杀组件,采用uvc紫外灯对扶手进行消杀,可对消杀区域进行全覆盖,避免存在消杀死角,设有擦拭清洁组件,可配合紫外消杀组件对扶手进行擦拭消杀,提升消杀效果,设有传感器系统组件,可以实现对扶手的定时、定量消杀任务以及紧急避险的作用。
54.以上对本实用新型的一个实施例进行了详细说明,但内容仅为本实用新型的较佳
实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1