一种颈椎牵引设备的制作方法
1.本实用新型涉及脊柱病牵引治疗设备,尤其涉及一种颈椎牵引设备。
背景技术:
2.颈椎牵引是治疗脊柱病最常用的保守疗法之一,旨在拉伸脊柱颈段关节以对颈椎锥体周围组织进行减压,可以有效缓解症状。现有技术中的颈椎牵引设备基本分为两类,即固定式的颈椎牵引装置和便携式并可调节自身长度和角度的颈托结构。
3.对于固定式的颈椎牵引装置而言,如cn109009620a,cn107374798a等文献公开的颈椎牵引椅,其利用悬吊式的头部兜带对头部固定,然后利用牵引绳将头部兜带向上或者斜上方提拉以实现对患者头部的承重牵拉,从而拉伸患者颈椎关节。这类装置都采用直线牵引,也就是由两个固定点向相反的两方向施力,那么无论方向如何改变,颈椎得到的牵引力都是直线的力。然而正常健康的颈椎是存在一定的生理弯曲弧度的,直线牵引并不符合人体正常的生理曲度。
4.对于便携式颈托结构而言,如cn104939956a、cn103356321a、cn104207871b等文献公开的颈托类结构,其利用颈托自身高度和角度的调节来承受患者头部的重量,从而对患者颈部颈椎减压。但是这类结构是给予患者一个静态保持的直线牵引力,这种静态的牵引效率不高,并且在牵引过程中舒适感较低,甚至对一定的患者来说容易产生抗力,有可能现有症状没有解决反而会产生新的症状。
技术实现要素:
5.本实用新型的目的在于提供一种颈椎牵引设备,本实用新型可以在对患者颈椎进行竖直平面内的动态牵引基础上,同时保证患者颈椎于水平方向存在一定的曲张度,从而使得患者颈椎在保证生理曲度的基础上实现曲线牵引,提高颈椎病治疗效果。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种颈椎牵引设备,包括机架以及设置于机架上方的牵引装置,所述机架于对应人体颈椎处设有颈椎推动装置,所述颈椎推动装置包括相对机座水平方向移动的承载架,所述承载架上设有朝向人体颈椎动作的伸缩机构。
8.所述牵引装置包括与机架连接的吊杆,吊杆上滑动配合有吊块,吊块以及吊杆上均设有定滑轮,牵引绳一端绕过所述定滑轮后设有用于承载人体头部的兜带,牵引绳另一缠绕于线盘上,线盘与机架转动连接。
9.优选的,所述机架包括用于承载人体重量的座板以及对应人体坐姿状态背部设置的机仓,机仓对应人体颈椎处开设有用于暴露伸缩机构的窗口;所述机仓顶部固设有滑动轨道,滑动轨道与承载架顶部设置的滑块滑动配合。
10.优选的,所述滑动轨道呈内弧面朝向人体的曲面结构。
11.优选的,所述承载架或/和滑块上还设有水平向限位构件,所述水平向限位构件包括与承载架或滑块上预留内螺纹孔配和的手拧螺栓。
12.优选的,所述承载架上还设有竖直向滑动的滑座,所述滑座通过竖直向伸缩件与机架或承载架连接。
13.优选的,所述竖直向伸缩件包括电缸、气缸、液压缸伸缩件或由齿轮齿条副组成的竖直向动作机构;
14.所述齿轮齿条副包括与滑座固定连接的齿条,以及啮合齿条并与驱动机构输出端连接的齿轮。
15.优选的,所述驱动机构包括活动设置于承载架上的传动杆、暴露至外界的调节手轮,以及由两转动设置于承载架上且啮合的锥齿轮构成锥齿轮组,调节手轮通过传动杆与锥齿轮组的输入端连接,锥齿轮组的输出端与所述齿轮齿条副的齿轮连接。
16.优选的,传动杆上设有限位齿轮,限位齿轮与限位齿条啮合状态下,传动杆周转自由度为零。具体的,可以理解为限位齿轮可以相对限位齿条进行移动,当限位齿轮与限位齿条处于非啮合状态下时,限位齿轮和传动杆可以在手轮的带动下周转并实现锥齿轮组的传动;当限位齿轮与限位齿条处于啮合状态下时,限位齿轮无法周转,同时限制传动杆周转。实现上述功能的结构较多,例如,可以将限位齿轮和传动杆通过花键联接,当限位齿轮相对传动杆上移出花键范围时,限位齿轮与限位齿条分离且传动杆周转动作不受限制,当限位齿轮与传动杆恢复花键联接并与限位齿条啮合时,传动杆无法周转动作。又例如将所述传送杆采用套接的方管结构,如此可以通过上提调节手轮,使得传动杆顶段杆体带动限位齿轮上移并与限位齿条分离,而周转动作不受影响。又例如将限位齿条设置为活动结构,通过动作限位齿条的位置来实现其与限位齿轮的啮合与否。当然,举例中的花键联接并不仅限于限位齿轮和传动杆,例如将传动杆顶部设置套筒结构,套筒之间采用花键联接等等诸多变形均属于本实用新型的保护范围内。
17.优选的,所述伸缩机构为电缸、气缸或液压缸,伸缩机构的输出端朝向人体颈椎方向并设有安装架,安装架上可拆卸连接有用于接触人体脖颈的触头。
18.优选的,所述伸缩机构的非动作部件设置设于调节板上,所述滑座的水平向两端设有限位块,调节板上开设有配合限位块的缺口并与限位块销轴连接,调节板两端螺纹配合有用于抵压限位块的手拧螺栓。
19.本实用新型工作过程如下:
20.首先让患者坐位于座板上,然后根据患者的颈椎高度对伸缩机构进行如下调节:
21.1)于患者宽度方向的位置调节,将滑块沿机仓的滑动轨道移动,进而带动承载架移动,并实现伸缩机构相对患者宽度方向的位置改变。调节到位后,利用手拧螺栓抵触机架,实现滑块和承载架相对机架的位置限位,由于滑动轨道呈曲面结构,所以伸缩机构的呈以其输出端为圆心的摆动动作。可以在有效降低伸缩机构输出端的水平位移量基础上,调整伸缩机构的施力方向。
22.2)于患者高度方向的位置调节,
23.①
滑座通过气缸、电缸或液压缸等竖直向伸缩件与机架或承载架连接的,通过改变竖直向伸缩件的长度,进而实现滑座带动伸缩机构相对承载架即相对患者高度方向的位置改变;
24.②
所述滑座与机架或承载架通过齿轮齿条副传动连接的,
25.先将限位齿轮和限位齿条调整为非啮合状态,即相对传动杆上移限位齿轮,使得
限位齿轮移出花键范围并与限位齿条分离,传动杆周转动作不受限制,然后通过调节手轮带动传动杆转动,进而带动锥齿轮组的传动,并最终驱动齿轮齿条副中的齿轮转动,使得齿条带动承载架上、下移动,实现滑座以及伸缩机构于患者高度方向的位置调节;调节完毕后,将限位齿轮相对传动杆下移,恢复限位齿轮和传动杆的花键联接并与限位齿条啮合,传动杆无法周转动作。
26.3)伸缩机构于患者颈椎处接触点的角度位置调节,
27.由于安装伸缩机构的调节板与滑座组成转动副,所以调节板带动伸缩机构于其所在的竖直平面内,可以相对滑座发生一定角度的转动,该转动角度受限于缺口与限位块的尺寸配合、调节板与滑座的间隙尺寸配合等等,进而使得触头相对患者颈椎处的位置发生改变。
28.上述三种位置调节,可以针对不同体型、不同病灶部位的患者进行择一、择二或者同时操作,最终使得伸缩机构的触头作用于患者颈椎病灶区并于某一角度施力。同时配合不同造型的触头,可以有效针对颈椎的某一节点进行不同方向的施力顶触。
29.最后,调节牵引装置上吊块的位置,从而调节牵引绳给予兜带牵拉力的方向,配合触头的施力方向,最终确保患者的颈椎呈现曲线牵拉。伸缩机构的动作频率和动作幅度,由操作人员在对患者具体病情的诊断基础上设定。
30.本实用新型与现有技术相比,具有如下优点:
31.1)通过改变吊块相对吊杆的位置,实现头部于竖直的方向牵引力的变化,同时配合触头给予颈椎水平方向的施力,一方面可以使得颈椎在被牵引的基础上保持合理的生理曲度,另一方面可以使得颈椎的受力处于一种动态性变化状态,提高患者治疗时的舒适度。
32.2)触头的多角度、多方位的调节,使得本实用新型的适应性更强,可以针对不同体型、不同体质、不同病变位置的患者进行针对性牵引,市场前景良好。
附图说明
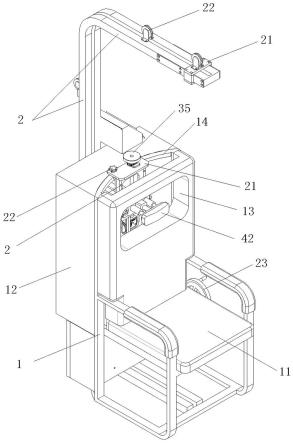
33.图1为具体实施方式所述颈椎牵引设备的结构示意图;
34.图2为图1所示颈椎牵引设备的立体结构示意图;
35.图3为具体实施方式所述颈椎牵引设备的机仓处的结构示意图。
具体实施方式
36.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
37.如图1-3所示,一种颈椎牵引设备,包括机架1、设置于机架1上方的牵引装置,以及设置于机架1上并对应人体颈椎处施力的颈椎推动装置,
38.所述牵引装置包括与机架1连接的吊杆2,吊杆2上滑动配合有吊块21,吊块21以及吊杆2上均设有定滑轮22,牵引绳一端绕过所述定滑轮22后设有用于承载人体头部的兜带,牵引绳另一缠绕于线盘23上,线盘23与机架1转动连接。
39.所述机架1包括用于承载人体重量的座板11以及对应人体坐姿状态下背部位置处的机仓12,机仓12对应人体颈椎处开设有窗口13;所述机仓12顶部敞口且设有滑动轨道14,
滑动轨道14于水平方向呈内弧面朝向人体的曲面结构;
40.所述颈椎推动装置包括承载架2,承载架2顶部设有与所述滑动轨道14滑动配合的滑块21,滑块21上通过内螺纹孔与用于顶抵机仓的手拧螺栓22配合。
41.所述承载架2上还设有竖直向滑动的滑座3,所述滑座3底部固定连接有齿条31,齿条31与转动连接于承载架2底部的齿轮32啮合;
42.由两转动设置于承载架2上且啮合的锥齿轮33构成锥齿轮组,其输出端与齿轮32传动连接,其输入端与传动杆34底端连接,传动杆34转动设置于承载架2上且传动杆34顶部与暴露至外界的调节手轮35连接;传动杆34上同轴花键联接有限位齿轮36,所述滑块21上固设有限位齿条23,限位齿轮36与限位齿条23啮合状态下,传动杆34周转自由度为零。
43.所述颈椎推动装置还包括输出端从机仓的窗口13处暴露并朝向人体颈椎方向的伸缩机构4,伸缩机构4为电缸,伸缩机构4的输出端上设有安装架41,安装架41上可拆卸连接有用于接触人体脖颈的触头42;伸缩机构4的非动作部件即电缸的缸筒部位设置设于调节板5上,所述滑座3的水平向两端设有限位块37,调节板5上开设有配合限位块37的缺口51并与限位块37销轴连接,调节板5两端螺纹配合有用于抵压限位块37的手拧螺栓52。
44.本实施例工作过程如下:
45.首先让患者坐位于座板上,然后根据患者的颈椎高度对伸缩机构进行如下调节:
46.1)于患者宽度方向的位置调节,将滑块沿机仓的滑动轨道移动,进而带动承载架移动,并实现伸缩机构相对患者宽度方向的位置改变。调节到位后,利用手拧螺栓抵触机架,实现滑块和承载架相对机架的位置限位,由于滑动轨道呈曲面结构,所以伸缩机构的呈以其输出端为圆心的摆动动作。可以在有效降低伸缩机构输出端的水平位移量基础上,调整伸缩机构的施力方向。
47.2)于患者高度方向的位置调节,
48.先将限位齿轮和限位齿条调整为非啮合状态,即相对传动杆上移限位齿轮,使得限位齿轮移出花键范围并与限位齿条分离,传动杆周转动作不受限制,然后通过调节手轮带动传动杆转动,进而带动锥齿轮组的传动,并最终驱动齿轮齿条副中的齿轮转动,使得齿条带动承载架上、下移动,实现滑座以及伸缩机构于患者高度方向的位置调节;调节完毕后,将限位齿轮相对传动杆下移,恢复限位齿轮和传动杆的花键联接并与限位齿条啮合,传动杆无法周转动作。
49.3)伸缩机构于患者颈椎处接触点的角度位置调节,
50.由于安装伸缩机构的调节板与滑座组成转动副,所以调节板带动伸缩机构于其所在的竖直平面内,可以相对滑座发生一定角度的转动,该转动角度受限于缺口与限位块的尺寸配合、调节板与滑座的间隙尺寸配合等等,进而使得触头相对患者颈椎处的位置发生改变。
51.上述三种位置调节,可以针对不同体型、不同病灶部位的患者进行择一、择二或者同时操作,最终使得伸缩机构的触头作用于患者颈椎病灶区并于某一角度施力。同时配合不同造型的触头,可以有效针对颈椎的某一节点进行不同方向的施力顶触。
52.最后,调节牵引装置上吊块的位置,从而调节牵引绳给予兜带牵拉力的方向,配合触头的施力方向,最终确保患者的颈椎呈现曲线牵拉。伸缩机构的动作频率和动作幅度,由操作人员在对患者具体病情的诊断基础上设定。
53.本实用新型目前已经完成研发设计和样机生产,且样机工作运行状态良好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1