一种用于复合机器人使用的厢式消杀平台的制作方法
1.本实用新型是一种用于复合机器人使用的厢式消杀平台,适用外围对接无人实验室、防护等级高的实验室、人机协作实验室,能对内部承载的复合机器人进行消杀,且能运送厢体内复合机器人到达下一任务地点,协助厢体内复合机器人完成所需要特殊级防护的任务。
背景技术:
2.在防护等级高的实验室,复合机器人进入实验室前需要消杀,而现在没有做到完全消杀,复合机器人携带灰尘、空气产生的病菌进入实验室后会对实验室严格的空气质量产生污染,从而也对正在做实验的产品污染,导致实验结果失败或者数据差异较大。
技术实现要素:
3.为解决现有技术问题,本实用新型提出一种用于复合机器人使用的厢式消杀平台,内部可承载需要运入实验室的复合机器人;厢式消杀平台内设置消杀装置,采取喷洒酒精、消毒液或辐照光源照射,对厢体内待运入/运出实验室的复合机器人进行消杀;并配备空气过滤器,对消杀平台内空气进行过滤;本实用新型提出的一种用于复合机器人使用的厢式消杀平台是密封性的,通过对厢体内待运入/运出实验室的复合机器人进行消杀和厢体内空气过滤转换,不会将病菌带入防护等级的实验室内,更不会对实验室内正在实验的产品导致污染。也不会将受污染的实验室内的病毒带出而扩散至室外环境。
4.为了实现该功能,本实用新型提出以下技术方案:一种用于复合机器人使用的厢式消杀平台,包括厢体、密封门、消杀装置、控制装置、电源,其特征在于:所述厢体的一端设有所述密封门,所述密封门与所述厢体铰链连接;所述消杀装置设于所述厢体内部,所述控制装置设置于厢体上,分别与消杀装置、密封门电性连接,所述电源设于厢体上且设有电源接口;所述控制装置由指令输入部分、指令智能处理部分和输出部分组成,其中,指令输入部分包括但不限于键盘和/鼠标和/或遥控器和/或触摸屏和/或麦克风,所述指令智能处理部分包括但不限于单片机和/或电脑主机和/或plc,所述输出部分包括但不限于显示屏和/或音箱和/或灯光报警和/或打印输出;所述电源接口包括但不限于三眼插座、航空插座等。
5.可选地,还包括可伸缩风琴罩,所述可伸缩风琴罩一端固定于所述密封门处厢体外壁,与所述厢体外壁密封连接,所述风琴罩另一端设有连接门,所述风琴罩的伸缩由控制装置电性控制;通过风琴罩的连接门与实验室门外围密封连接,在将厢体内部待运入/运出实验室的复合机器人消杀、厢体内部空气过滤净化后,厢体内部和实验室内部环境一致,避免了因实验室门的开闭造成的污染。
6.可选地,所述连接门还设有距离传感器,所述距离传感器与所述控制装置电性连接。
7.可选地,还包括空气净化过滤装置,所述空气净化装置设于所述厢体内壁且与所述控制装置电性连接。
8.可选地,还包括换气管和换气泵;所述换气泵设于所述厢体壁上与所述换气管气路密封连接,所述换气泵与所述控制装置电性连接。
9.可选地,所述密封门开门方式包括电动推拉式或液压推拉式,所述密封门的开合由所述控制装置电性控制;所述电动推拉式是指通过电机驱动电缸或线性运动部件的运动,将密封门打开/闭合;所述液压推拉式是指通过液压缸或液压杆驱动密封门,使密封门打开/闭合。
10.可选地,所述密封门开门方向为地开式,即所述密封门的底部与所述厢体铰链连接,密封门沿铰链旋转,完全打开后所述密封门的内壁与所述厢体的内底面水平或面平行;采取地开门方式,便于通过重型复合机器人进出厢体,避免压坏风琴罩。
11.可选地,所述消杀装置由增压设备、储液罐、拓扑液路管、至少一个喷淋头组成以及液面感应装置,所述增压设备与所述储液罐气路连接,所述拓扑液路管一端与所述储液罐密封连接,拓扑液路管的分支端数量与所述喷淋头数量一致且一一对应密封连接,所述液面感应装置包括感应装置和显示装置,二者电性连接或管路连接,所述感应装置设于储液罐内,所述显示装置设于储液罐外,所述增压设备与所述液面感应装置分别与控制装置电性连接。
12.可选地,所述消杀装置为一种或者多种辐照光源,所述辐照光源与所述控制装置电性连接;所述辐照光源发出的光波具有消毒杀菌功能,包括但不限于紫外灯。
13.可选地,所述厢体底部安装有至少三个轮子。
14.本实用新型的优点在于:
15.本实用新型提供了一种用于复合机器人使用的厢式消杀平台,首先,通过在厢体内部装置消杀器具,确保了对厢体内待运入/运出实验室的复合机器人消杀的可靠性;其次,通过在厢体内部设置空气净化过滤装置,确保了厢体内部空气的纯净;再次,通过在密封门外面设置伸缩风琴罩,通过风琴罩将实验室与厢体连成封闭整体,规避了复合机器人运入实验室时引起的空气污染;最后,通过在厢体底部设置轮子,使厢体转运更加简便或实现自动化。
16.综上所述,本实用新型提供的一种用于复合机器人使用的厢式消杀平台,相比较现有的不仅规避了潜在的风险,还具有使用更简便的特点。
附图说明
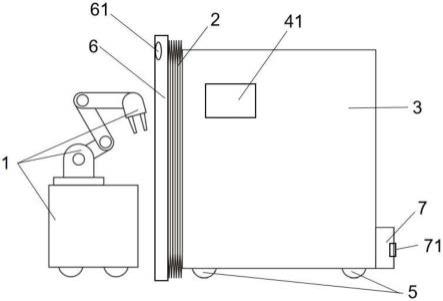
17.图1为本实用新型的实施例图、图2和图3均为本实用新型的实施例剖面图图
18.其中:1为复合机器人;2为风琴罩;3为厢体;4控制装置;5为轮子;6为对接门;7为电源;71为电源接口;31为密封门;32为空气过滤器;33为辐照光源;34为喷嘴;31a为密封门门体;31b为电缸或液压缸;41为显示器;61为距离传感器。
具体实施方式
19.为详细说明本实用新型的技术内容、构造特征、所达成目的及功效,下面结合实施例并配合附图予以详细说明。
20.图1为本实用新型的实施例图、图2和图3均为本实用新型的实施例剖面图图。
21.如图1所示,厢式消杀平台厢体3的一侧固定密封安装有风琴罩2,风琴罩2的另外
一端设有对接门6,对接门6上安装有距离传感器61,距离传感器61与设于厢体3上的控制装置4电性连接,厢体外壁上设有显示器41,显示器41与控制装置4电性连接作为其输出部分;在厢体3上,还设有电源7,电源7穿过厢体3且其与厢体3密封连接,在电源7的两侧设有电源接口71,电源接口71用以给电源7充电,或由电源7给复合机器人1充电;同时厢体3的底部设有轮子5作为支撑,需要说明的是,控制装置4由指令输入部分、指令智能处理部分和输出部分组成,其中,指令输入部分包括但不限于键盘和/鼠标和/或遥控器和/或触摸屏和/或麦克风,所述指令智能处理部分包括但不限于单片机和/或电脑主机和/或plc等具备具有数据处理能力的智能化控制装置,所述输出部分包括但不限于显示器41和/或音箱和/或灯光报警和/或打印输出;同时,轮子5不仅可以作为支撑由外力推动滚动,还可以通过加装电机进行驱动,使轮子5能够自主可控的滚动,此时,电机与控制装置4电性连接。
22.厢体3上设有密封门31,密封门31被风琴罩2完全罩住,密封门31由密封门门体31a和电缸或液压缸31b组成,其中,密封门门体31的一侧与厢体3铰链连接,电缸或液压缸31b的一端与厢体3铰链接,另一端与密封门门体31a铰链接,且电缸或液压缸31b与所述控制装置4电性连接;厢体3的内部还设有空气过滤器32、辐照光源33和喷嘴34,喷嘴34通过液路管路与储液罐液路连接,储液罐内装有消毒液或酒精并设有液位传感器,同时储液罐上还设有增压装置,其中,空气过滤器32、辐照光源33、液位传感器和增压装置均分别与控制装置4电性连接,由控制装置4控制其工作状态;需要加以说明的是,本实施例中的空气过滤器32即可以是具备自主空气过滤净化、杀菌消毒功能的过滤器,也可以是通过换气泵和管路与环境空气净化通道如医院的空气净化通道相连接;所述辐照光源33发出的光波具有消毒杀菌功能,如紫外灯。
23.实际工作时,操作人员通过控制装置4输入指令,当前工作状态可由与控制装置4电性连接的显示器41显示,可以分为从外部朝实验室运送设备和从实验室朝外部运送设备,在从外部朝实验室运送设备的情况下,操作人员通过控制装置4输入指令,控制装置4通过电信号控制电缸或液压缸31b工作,驱动密封门门体31a,从而打开密封门31,复合机器人1自行驶入厢体3内,由操作人员推动或控制装置4控制厢体3下面的轮子转动,将装载有复合机器人1的厢体3移动至复合机器人1需要进入的实验室大门处,控制装置4电性控制风琴罩2伸出,通过距离传感器61控反馈距离,使对接门6与实验室大门密封接触。
24.在风琴罩2运动的同时或结束后,控制装置4电性控制安装在储液罐上的增压装置工作,并通过储液罐内的液位传感器监测储液罐内的消毒液或酒精,增压装置工作后,储液罐内的消毒液或酒精在压力的作用下,经液路管路流向喷嘴34,经由喷嘴34喷出从而喷洒在复合机器人1上对复合机器人1进行消杀;控制装置4控制辐照光源33工作,对复合机器人1进行照射式消杀;需要说明的是,这里先描述的是喷洒式消杀,后描写的是照射式消杀,并不是必须的顺序,也就是可以只进行喷洒式消杀或照射式消杀,也可以是先进行照射式消杀再进行喷洒式消杀,或者同时进行照射式消杀和喷洒式消杀。
25.在风琴罩2上的对接门6与实验室大门密封接触且消杀工作完成后,控制装置4控制空气过滤器32工作,对厢体3内的空气进行循环消杀或置换消杀或同时进行循环和置换,这里所说的循环消杀是指空气过滤器32本身具有消杀功能,对厢体3内部的空气能够进行循环消杀,置换消杀是指通过换气泵将厢体3内部的空气经由管路排出到环境空气净化通道,如医院的负压管道。
26.在完成了对接门6对接、对复合机器人1的消杀、厢体3内部空气的消杀工作后,实验室大门打开,复合机器人1自主运动进入实验室,复合机器人1进入实验室后,实验室大门关闭;在实验室大门关闭后,须先使空气过滤器32对厢体内的空气进行消杀,同时对厢体3内部进行喷洒式消杀和照射式消杀,才能使对接门6脱离接触,从而完成将复合机器人1运送如实验室内的工作。
27.在等待对复合机器人1消杀工作的过程中,厢式消杀平台可移动至充电区,通过电源7上的电源接口71进行充电,确保电池电量。
28.从实验室内朝外部运送设备时,与从外部朝实验室运送设备的操作流程和消杀流程相反,也即先将对接门6与实验室大门对接,对厢体3内部进行消杀,才能打开实验室大门,复合机器人1从实验室驶入厢体3内,实验室大门关闭后,对复合机器人1进行消杀工作,同时需要对厢体3内空气进行消杀,在完成一系列消杀工作后,才能使对接门6与实验室大门脱离接触,复合机器人1驶出厢体3,密封门31关闭,风琴罩2收回处于收缩状态。
29.在运送复合机器人1的过程中,复合机器人1可以通过电源7上的电源接口71进行充电,确保复合机器人1电量足够。
30.通过上述实施例,可以清晰的看出,本实用新型提出的一种厢式消杀平台,相比较现有的不仅规避了潜在的风险,具有明显的可靠性,还具有使用更简便的特点。
31.以上皆为本实用新型具体实施例,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1