心脏介入机器人辅助平台的制作方法
1.本发明涉及医疗器械技术领域,具体是心脏介入机器人辅助平台。
背景技术:
2.心脏介入机器人是一种能够通过机器人对病人进行心脏手术的设备,在使用心脏介入机器人进行手术时,需要使用辅助平台对病人进行支撑,进而使得病人能够躺在平台上进行手术治疗,其适用于心血管(冠心病、脑卒中、外周血管闭塞)冠状动脉粥样硬化性心脏病,冠状动脉粥样硬化性心脏病是冠状动脉血管发生动脉粥样硬化病变引起血管腔狭窄或堵塞,造成心肌缺血,缺氧或坏死而导致的心脏病,通过辅助平台辅助心脏介入机器人对病人进行手术,使得病人进行手术更加的顺利,并且使得医生的负担得到减轻。
3.中国专利号201680043291.x本发明涉及一种手术台(10),所述手术台具有手术台支柱(14)和设置在手术台支柱(14)上的患者支承面(12),所述手术台支柱(14)包括支柱外壳(40),所述支柱外壳具有至少两个相叠设置的刚性的部件(42a、42b)。所述手术台支柱(14)构造成,使得手术台(10)的所有在所述手术台支柱(14)内部延伸的活动部分(38)在侧向完全被覆盖。一个中间空间(66)从支柱外壳(40)的两个相叠设置的部件(42a、42b)的上边缘(44)一直延伸到患者支承面(12),所述中间空间(66)是没有波纹管的空间。
4.现有技术的心脏介入机器人使用的辅助平台不方便进行高度调节,导致病人进行手术时不方便,且不能进行对头部进行抬高,导致头部无法调节到最佳舒适的高度,并且透气性较差,导致病人长时间躺在辅助平台上不舒适,容易引起病人的异常反应,进而影响手术的正常进行,因此,亟需设计心脏介入机器人辅助平台用于牙机系统的气控阀来解决上述的问题。
技术实现要素:
5.本发明的目的在于提供心脏介入机器人辅助平台,以解决上述背景技术中提出的不方便进行高度调节、不方便对头部进行抬高、透气性较差的问题。
6.本发明的技术方案是:心脏介入机器人辅助平台,包括底箱,所述底箱的顶部外壁通过螺栓连接有底壳,所述底壳的外部套接有上壳,所述上壳的顶部外壁通过螺栓连接有支撑板,所述支撑板的一侧设置有升降板,所述底壳的底部内壁焊接有两个螺套,所述上壳的顶部内壁通过轴承连接有两个竖螺杆,两个所述竖螺杆分别与两个螺套通过螺纹连接,所述上壳的两侧内壁之间通过轴承连接有蜗杆,两个所述竖螺杆的外部焊接有蜗轮,所述蜗杆与两个蜗轮均啮合,所述上壳的一侧外壁通过螺栓连接有伺服电机一,所述伺服电机一的输出轴一端与蜗杆通过花键连接,所述支撑板的一侧设置有机器人本体。
7.进一步地,所述支撑板的底部外壁通过螺栓连接有支撑壳,所述支撑壳的两侧内壁之间通过轴承连接有双纹路螺杆,所述双纹路螺杆的外部通过螺纹连接有两个连接环,两个所述连接环分别与升降板之间通过轴铰接有连杆,所述支撑壳的顶部外壁开有活动槽,两个所述连杆与活动槽相适配,所述支撑壳的一侧外壁通过螺栓连接有伺服电机二,所
述伺服电机二的输出轴一端与双纹路螺杆通过花键连接。
8.进一步地,所述支撑板一侧通过铰链连接有两个尾板,所述尾板的顶部外壁设置有防护垫。
9.进一步地,所述底箱的顶部内壁通过轴铰接有两个轮架,两个所述轮架的底部外壁通过轴铰接有脚轮,两个所述轮架之间通过轴铰接有连接杆,所述连接杆与底箱的顶部内壁之间通过轴铰接有电动伸缩杆。
10.进一步地,所述支撑板的内部设置有空腔,所述支撑板的底部外壁焊接有进气阀。
11.进一步地,所述支撑板的内部设置有层板,所述层板的顶部外壁开有均匀分布的透气孔,所述支撑板的顶部设置有透气软板,所述透气软板和层板之间通过螺栓连接有均匀分布的弹簧。
12.进一步地,所述升降板的顶部外壁设置有头枕,所述头枕的顶部外壁设置有凹槽。
13.进一步地,所述上壳的一侧外壁开有限位槽,所述底壳的一侧外壁通过螺栓连接有限位块,所述限位块滑动连接于限位槽的内部。
14.进一步地,所述支撑壳的一侧外壁焊接有进油嘴,所述进油嘴的内部通过螺纹连接有密封盖。
15.进一步地,所述底箱的内部通过连接有均匀分布的支筒,所述支筒的内部通过螺纹连接有调节脚。
16.本发明通过改进在此提供心脏介入机器人辅助平台,与现有技术相比,具有如下改进及优点:
17.(1)本发明利用蜗杆带动两个蜗轮和竖螺杆进行同步转动,使得竖螺杆通过与螺套的螺纹连接对支撑板进行升高或降低,因此实现了辅助平台方便进行高度调节的效果,进而使得病人的手术更加的方便。
18.(2)本发明利用双纹路螺杆的转动使得两个连接环分别带动两个连杆的底端进行运动,进而使得升降板顶部的头枕能够方便的进行高度调节,因此实现了病人平躺时头部进行调节到合适的高度的效果。
19.(3)本发明利用进气阀可以向支撑板的空腔内部通入空气,使得空气通过出气孔和透气软板进行出来,进而使得病人躺下时背部能够进行很好的透气,使得病人躺下时更加的舒适。
20.(4)本发明利用电动伸缩杆带动连接杆进行运动,进而使得轮架底部的脚轮与地面进行接触,使得辅助平台需要进行移动时能够通过脚轮进行方便的移动,因此实现了辅助平台方便进行移动的效果。
附图说明
21.下面结合附图和实施例对本发明作进一步解释:
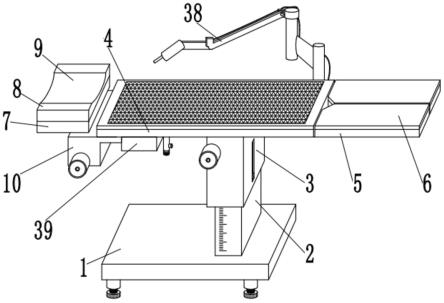
22.图1是本发明的整体结构示意图;
23.图2是本发明的内部结构示意图;
24.图3是本发明的低箱结构示意图;
25.图4是本发明的支撑壳结构示意图;
26.图5是本发明的支撑板结构示意图;
27.图6是本发明的控制流程图。
28.附图标记说明:
29.1底箱、2底壳、3上壳、4支撑板、5尾板、6防护垫、7升降板、8头枕、9凹槽、10支撑壳、11蜗杆、12竖螺杆、13伺服电机一、14蜗轮、15刻度、16螺套、17支筒、18调节脚、19轮架、20脚轮、21电动伸缩杆、22连接杆、23双纹路螺杆、24连接环、25连杆、26伺服电机二、27活动槽、28进气阀、29空腔、30层板、31透气孔、32透气软板、33弹簧、34进油嘴、35密封盖、36限位槽、37限位块、38机器人本体、39控制器。
具体实施方式
30.下面将结合附图1至图6对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.本发明通过改进在此提供心脏介入机器人辅助平台,如图1-图6所示,包括底箱1,底箱1的顶部外壁通过螺栓连接有底壳2,底壳2的一侧外壁具有刻度15,底壳2的外部套接有上壳3,上壳3的顶部外壁通过螺栓连接有支撑板4,支撑板4的一侧设置有升降板7,底壳2的底部内壁焊接有两个螺套16,上壳3的顶部内壁通过轴承连接有两个竖螺杆12,两个竖螺杆12分别与两个螺套16通过螺纹连接,利用两个螺套16进行转动,使得支撑板4被抬高,上壳3的两侧内壁之间通过轴承连接有蜗杆11,两个竖螺杆12的外部焊接有蜗轮14,蜗杆11与两个蜗轮14均啮合,上壳3的一侧外壁通过螺栓连接有伺服电机一13,伺服电机一13的输出轴一端与蜗杆11通过花键连接,利用伺服电机一13带动蜗杆11进行转动,使得蜗杆11带动两个蜗轮14和竖螺杆12进行同步转动,使得竖螺杆12通过与螺套16的螺纹连接对支撑板4进行升高或降低,因此实现了辅助平台方便进行高度调节,支撑板4的一侧设置有机器人本体38,机器人本体38为现有技术的心脏介入机器人,利用支撑板4进行升高或降低使得病人进行抬高或降低,进而使得机器人本体38对病人进行心脏介入手术时的位置达到最佳。
34.进一步地,支撑板4的底部外壁通过螺栓连接有支撑壳10,支撑壳10的两侧内壁之间通过轴承连接有双纹路螺杆23,双纹路螺杆23的外部通过螺纹连接有两个连接环24,两个连接环24分别与升降板7之间通过轴铰接有连杆25,支撑壳10的顶部外壁开有活动槽27,两个连杆25与活动槽27相适配,支撑壳10的一侧外壁通过螺栓连接有伺服电机二26,伺服电机二26的输出轴一端与双纹路螺杆23通过花键连接,利用伺服电机二26带动双纹路螺杆
23进行转动,使得双纹路螺杆23的转动使得两个连接环24分别带动两个连杆25的底端进行运动,进而使得升降板7顶部的头枕8能够方便的进行高度调节,支撑板4的底部外壁通过螺栓安装有控制器39,机器人本体38、伺服电机一13和伺服电机二26,分别通过导线与控制器39呈电性连接,通过控制器39对伺服电机一13和伺服电机二26进行控制,使得辅助平台能与机器人本体38之间形成联动,控制器39通过导线与手术的成像系统和通讯模块进行电性连接,利用通讯模块使得机器人本体38能够通过专家进行远程操作,实现通过机器人本体38能够远程操作和调整心脏介入使用的导丝和支架,实现辅助平台对微创介入手术进行引导,并且通过成像系统识别出支架到位后,能够通过控制器39的控制使得对球囊开始充气,使得植入球囊到位后进行自动充气。
35.进一步地,支撑板4一侧通过铰链连接有两个尾板5,尾板5的顶部外壁设置有防护垫6,两个尾板5可以进行一定角度的打开,使得病人的双脚便于进行放置。
36.进一步地,底箱1的顶部内壁通过轴铰接有两个轮架19,两个轮架19的底部外壁通过轴铰接有脚轮20,两个轮架19之间通过轴铰接有连接杆22,连接杆22与底箱1的顶部内壁之间通过轴铰接有电动伸缩杆21,电动伸缩杆21的型号为tx-03,通过电动伸缩杆21带动连接杆22进行运动,进而使得轮架19底部的脚轮20与地面进行接触,使得辅助平台需要进行移动时能够通过脚轮20进行方便的移动。
37.进一步地,支撑板4的内部设置有空腔29,支撑板4的底部外壁焊接有进气阀28,通过进气阀28能够向支撑板4的空腔29内部通入空气。
38.进一步地,支撑板4的内部设置有层板30,层板30的顶部外壁开有均匀分布的透气孔31,支撑板4的顶部设置有透气软板32,透气软板32采用亚克力材质制成,使得透气软板32能够直接与病人进行接触,透气软板32和层板30之间通过螺栓连接有均匀分布的弹簧33,利用弹簧33对弹簧33透气软板32进行弹性支撑。
39.进一步地,升降板7的顶部外壁设置有头枕8,头枕8的顶部外壁设置有凹槽9,利用凹槽9使得头部便于进行固定。
40.进一步地,上壳3的一侧外壁开有限位槽36,底壳2的一侧外壁通过螺栓连接有限位块37,限位块37滑动连接于限位槽36的内部,利用限位块37使得底壳2不易与上壳3发生脱离。
41.进一步地,支撑壳10的一侧外壁焊接有进油嘴34,进油嘴34的内部通过螺纹连接有密封盖35,利用进油嘴34打开,通过进油嘴34向支撑壳10的内部加入润滑油,润滑油使得双纹路螺杆23与连接环24之间进行转动时受到的摩擦力进行减小。
42.进一步地,底箱1的内部通过连接有均匀分布的支筒17,支筒17的内部通过螺纹连接有调节脚18,利用调节脚18方便对辅助平台进行水平防止。
43.本发明的工作原理为:对密封盖35进行转动,通过进油嘴34打开,通过进油嘴34向支撑壳10的内部加入润滑油,当需要对支撑板4进行进行升高时,通过对伺服电机一13进行搅动,使得伺服电机一13带动蜗杆11进行转动,蜗杆11的转动带动蜗轮14进行转动,使得蜗轮14带动竖螺杆12进行转动,进而使得竖螺杆12通过与螺套16的螺纹连接进行升高,当需要对头枕8进行降低时,对伺服电机二26进行转动,使得伺服电机二26带动双纹路螺杆23进行转动,使得双纹路螺杆23带动两个连接环24相互远离运动,进而使得连接环24带动连杆25与升降板7发生转动,进而使得升降板7的高度得到降低,通过润滑油使得双纹路螺杆23
与连接环24之间进行转动时受到的摩擦力进行减小,使得头枕8的高度调节更加的方便,当需要对辅助平台进行移动时,通过导线接通电动伸缩杆21的电源,使得电动伸缩杆21带动连接杆22进行向下移动,进而使得两个轮架19进行转动,使得轮架19底部的脚轮20与地面进行接触,进而可以通过脚轮20对辅助平台进行方便的移动。
44.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1