一种多自由度仿生外骨骼本体结构
1.本发明涉及骨骼机器人技术领域,具体涉及一种多自由度仿生外骨骼本体结构。
背景技术:
2.外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术;目前国内外均处于研发阶段,均致力于研发出功能强大且实用的外骨骼机器人,而在医疗领域中,外骨骼机器人的使用也越来越广泛,常用于患者的康复训练。
3.目前问世的外骨骼机器人,一部分自由度较少,其只针对个别关节进行设计,实现少量的踏步抬腿等动作,无法对使用者的整个下肢进行辅助和锻炼,具有较大的使用局限性;另一部分可辅助多关节的外骨骼机器人,并不具备大腿外展或原地转弯等功能,康复动作单一,无法实现机器人的独立行走,距离实现仿生步态有较大差距。
技术实现要素:
4.本发明的目的在于提供一种多自由度仿生外骨骼本体结构,通过设置髋部外展电机、髋关节屈伸电机、膝关节屈伸电机、踝侧直线电机以及踝后直线电机;以解决上述背景技术中提出的现有的外骨骼机器人具有较大的使用局限性以及距离实现仿生步态有较大差距的问题。
5.为实现上述目的,本发明提供如下技术方案:一种多自由度仿生外骨骼本体结构,包括髋部支撑机构、髋关节屈伸电机、大腿机构、小腿机构、脚底板、电池控制盒、控制手柄以及护具绑带,所述髋部支撑机构下端一侧设有髋关节外展电机安装件,所述髋关节外展电机安装件通过转轴与旋转连接件连接,所述转轴与髋关节外展电机安装件之间安装有衬套轴承,所述转轴与衬套轴承间通过锁紧螺丝连接,所述旋转连接件通过固定销与转轴固定连接;
6.所述髋部支撑机构下端另一侧设有髋部外展电机,所述髋部外展电机通过螺钉固定在髋关节外展电机安装件外部一侧,所述髋部外展电机输出轴一端通过联轴器与转轴连接。
7.优选的,所述髋关节屈伸电机位于旋转连接件上端,所述髋关节屈伸电机输出轴一端用过联轴器与大腿机构内部连接。
8.优选的,所述大腿机构下端设有膝关节屈伸电机,所述膝关节屈伸电机输出轴一端通过联轴器与小腿机构内部连接。
9.优选的,所述脚底板固定安装于踝关节部件下端,所述踝关节部件与小腿机构通过十字轴套连接。
10.优选的,所述踝关节部件一侧设有踝侧直线电机,所述踝关节部件另一侧设有踝后直线电机。
11.优选的,所述踝后直线电机上端连接有十字节,所述踝后直线电机通过第一销轴
固定安装于小腿机构另一侧,所述踝后直线电机下端设有球形轴承,所述踝关节部件内部开设有安装孔,所述球形轴承与安装孔匹配设置。
12.优选的,所述踝侧直线电机通过第二销轴固定安装于小腿机构外部一侧,所述踝侧直线电机下端设有轴承,所述轴承与踝关节转轴一端连接。
13.优选的,所述电池控制盒固定安装于髋部支撑机构外部一侧,所述髋部支撑机构外部另一侧设有控制手柄,所述控制手柄上端分别设有操纵杆以及显示屏。
14.优选的,所述护具绑带部分包括髋部护具以及腿部护具,所述髋部护具覆盖于髋部支撑机构内表面,所述髋部护具外部两侧设有髋部绑带,所述大腿机构内表面以及小腿机构内表面均覆盖有腿部护具,所述腿部护具两侧设有腿部绑带。
15.优选的,所述大腿机构以及小腿机构外部均设有腿部支撑机构,所述腿部支撑机构位于腿部护具外部。
16.综上所述,由于采用了上述技术,本发明的有益效果是:
17.1、本发明中通过髋部外展电机、髋关节屈伸电机、膝关节屈伸电机、踝侧直线电机以及踝后直线电机的配合使用,实现了对患者的髋部、大腿、小腿以及脚踝在进行康复训练时,实现多自由度训练的效果,进而能够实现灵活多样的康复动作,从而大幅提高康复效率;
18.2、本发明通过主控器作为核心控制器与10个电机并行连接,从而实时读取电机的位置信息,进而在实际使用时,通过控制手柄上的显示屏与操纵杆进行通讯同时与用户进行图文交互,用户通过用户输入端进行指令输入,主控器将用户的指令下发给对应电机,从而完成相应的动作,整个操作过程简单便捷,便于相关用户进行使用。
附图说明
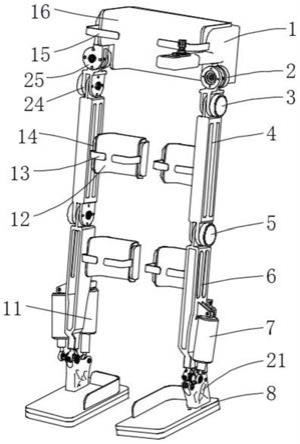
19.图1为本发明主体结构示意图;
20.图2为本发明髋部外展电机连接结构示意图;
21.图3为本发明控制机构主体结构示意图;
22.图4为本发明小腿机构各部件爆炸图;
23.图5为本发明工作流程控制框图。
24.图中:1、髋部支撑机构;2、髋部外展电机;202、锁紧螺丝;203、转轴;204、衬套轴承;205、固定销;207、螺钉;3、髋关节屈伸电机;4、大腿机构;5、膝关节屈伸电机;6、小腿机构;7、踝侧直线电机;72、第二销轴;8、脚底板;11、踝后直线电机;112、第一销轴;113、球形轴承;115、十字节;12、腿部护具;13、腿部绑带;14、腿部支撑机构;15、髋部绑带;16、髋部护具;17、电池控制盒;18、控制手柄;19、操纵杆;20、显示屏;21、踝关节部件;22、十字轴套;23、踝关节转轴;24、旋转连接件;25、髋关节外展电机安装件。
具体实施方式
25.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明
保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
26.实施例1
27.本发明提供了如图1-5所示的一种多自由度仿生外骨骼本体结构,包括髋部支撑机构1、髋关节屈伸电机3、大腿机构4、小腿机构6、脚底板8、电池控制盒17、控制手柄18以及护具绑带,髋部支撑机构1下端一侧设有髋关节外展电机安装件25,髋关节外展电机安装件25通过转轴203与旋转连接件24连接,转轴203与髋关节外展电机安装件25之间安装有衬套轴承204,转轴203与衬套轴承204间通过锁紧螺丝202连接,旋转连接件24通过固定销205与转轴203固定连接,实际进行髋部活动训练时,通过控制转轴203进行旋转,进而带动旋转连接件24进行转动,随即在旋转连接件24的转动下,带动旋转连接件24下端的大腿机构4进行外展旋转,即可实现使用者髋关节带动大腿的外展动作,以实现使用者对髋关节进行康复训练的效果。
28.髋部支撑机构1下端另一侧设有髋部外展电机2,髋部外展电机2通过螺钉207固定在髋关节外展电机安装件25外部一侧,髋部外展电机2输出轴一端通过联轴器与转轴203连接,髋关节屈伸电机3位于旋转连接件24上端,髋关节屈伸电机3输出轴一端用过联轴器与大腿机构4内部连接,实际驱动转轴203进行转动时,通过开启髋部外展电机2即可驱动髋部外展电机2的输出轴进行旋转,进而得以通过联轴器带动转轴203进行转动,以实现旋转连接件24下端的大腿机构4进行外展旋转的效果,髋关节屈伸电机3驱动输出轴的转动方向与髋部外展电机2输出轴的转动方向相互垂直,同样的,通过开启髋关节屈伸电机3可带动与髋关节屈伸电机3输出轴连接的大腿机构4实现下肢在前进方向的屈伸动作;以实现对使用者髋关节进行康复训练的效果。
29.实施例2
30.本实施例2与实施例1不同之处在于:大腿机构4下端设有膝关节屈伸电机5,膝关节屈伸电机5输出轴一端通过联轴器与小腿机构6内部连接,膝关节屈伸电机5输出轴的转动方向与髋关节屈伸电机3输出轴的转动方向相互平行,且膝关节屈伸电机5的传动机构与髋关节屈伸电机3相似,进而在开启膝关节屈伸电机5时带动膝关节屈伸电机5的输出轴进行转动,以实现带动与膝关节屈伸电机5输出轴连接的小腿机构6实现下肢在膝关节的屈伸动作,从而实现对使用者的膝关节进行康复训练的效果。
31.实施例3,
32.本实施例3与实施例1和2不同之处在于:脚底板8固定安装于踝关节部件21下端,踝关节部件21与小腿机构6通过十字轴套22连接,踝关节部件21一侧设有踝侧直线电机7,踝关节部件21另一侧设有踝后直线电机11,踝后直线电机11上端连接有十字节115,踝后直线电机11通过第一销轴112固定安装于小腿机构6另一侧,踝后直线电机11下端设有球形轴承113,踝关节部件21内部开设有安装孔,球形轴承113与安装孔匹配设置,通过设置十字轴套22可实现两个垂直方向上的旋转动作,其中为实现踝关节的2个自由度动作,从而得以实现通过开启踝后直线电机11时,踝后直线电机11的输出轴可进行旋转,同时在球形轴承113的带动下,实现了踝后直线电机11的输出轴与使用者脚部的相对位置可实现伸长和缩短,
进而在踝后直线电机11的输出轴伸长和缩短的带动下会推动踝关节部件21进行旋转,进而带动使用者脚部实现背屈和跖屈动作;从而实现了对使用者的踝关节进行康复训练的效果,脚底板8用于放置使用者的脚部,再通过脚底板8外部的限位板以及底板的配合使用对使用者的脚部进行辅助限位,从而得以稳定的进行踝关节康复训练。
33.踝侧直线电机7通过第二销轴72固定安装于小腿机构6外部一侧,踝侧直线电机7下端设有轴承,轴承与踝关节转轴23一端连接,踝侧直线电机7同样设置有轴承,轴承与球形轴承113的作用相似,进而在实际使用时,通过开启踝侧直线电机7,驱动踝侧直线电机7的输出轴进行旋转,同时带动踝侧直线电机7的输出轴与使用者脚部的相对位置进行伸长和缩短,随即带动踝关节部件21进行转动,从而实现了带动使用者脚部进行外翻和内翻动作的效果。
34.护具绑带部分包括髋部护具16以及腿部护具12,髋部护具16覆盖于髋部支撑机构1内表面,髋部护具16外部两侧设有髋部绑带15,大腿机构4内表面以及小腿机构6内表面均覆盖有腿部护具12,腿部护具12两侧设有腿部绑带13,大腿机构4以及小腿机构6外部均设有腿部支撑机构14,腿部支撑机构14位于腿部护具12外部,实际进行穿戴时,将髋部支撑机构1穿戴在用户的髋部,此时髋部护具16直接与用户向接触,再通过髋部绑带15进行捆绑固定,从而将对用户的髋部穿戴完成;以同样的方式将腿部支撑机构14穿戴在用户的大腿以及小腿外部,同样与用户腿部直接接触的为腿部护具12,再通过腿部绑带13进行捆绑固定,从而对用户的髋部进行穿戴完成,最后再通过脚底板8将用户的脚部放置在脚底板8上端,实现了对整个外骨骼本体结构进行穿戴的效果,用户的髋部和腿部的护具以及绑带均为柔软的织物,可保证使用者舒适牢固的进行肢体固定,进而得以舒适的进行康复训练。
35.实施例4
36.本实施例4与实施例1、2以及3的不同之处在于:电池控制盒17固定安装于髋部支撑机构1外部一侧,髋部支撑机构1外部另一侧设有控制手柄18,控制手柄18上端分别设有操纵杆19以及显示屏20,用户可通过主控器实现对整个外骨骼本体结构进行控制,通过主控器作为核心控制器与10个电机并行连接,实时读取电机的位置信息;控制手柄18上的显示屏20与操纵杆19进行通讯同时与用户进行图文交互,用户通过用户输入端进行指令输入,主控器将用户的指令下发给对应电机,完成相应的动作,电池控制盒17与髋部外展电机2、髋关节屈伸电机3、膝关节屈伸电机5、踝侧直线电机7、踝后直线电机11均电性连接,且电池控制盒17与操纵杆19以及显示屏20同样电性连接,进而使得通过电池控制盒17整个外骨骼本体结构提供电力支持。
37.实际使用时,将用户的脚部放置在脚底板8上端后,用户通过操纵杆19在显示屏20上选取行走指令,点击操纵杆19上的确认按钮,主控器接收到行走指令并进行编译,首先控制髋关节屈伸电机3和膝关节屈伸电机5旋转一定角度,使得使用者右侧肢体向前抬起一定高度,完成抬腿动作,此时左侧肢体的髋关节屈伸电机3向前旋转一定角度,使用者重心向前倾,右侧肢体髋关节屈伸电机3和膝关节屈伸电机5回转一定角度,右侧脚底板8落地,完成向前一步的动作,之后两腿交错重复此过程即可实现机器人的向前行走。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
39.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1