一种医用扳手的制作方法
1.本发明涉及医疗机械技术领域,特别涉及一种医用扳手。
背景技术:
2.生活水平的提高促使人类对于健康越来越关注,从而使医疗行业更加专业和细化,带动了专用医疗器械的快速发展。在骨头外科器械领域螺丝固定方面,之前已经有种类非常多的专用及多用途工具,基本满足了骨裂等外科手术的需要,但是也存在一些实际应用的不足,比如,在拧动螺丝时,扳手与螺丝之间出现消屑,如果不进行有效方式制止,随意掉落的铁屑等杂质很可能对患者病灶处引起炎症,使患者受到不必要的伤害,严重时威胁患者生命,传统医用扳手在使用时需要进行专门的消毒工作,费时费力,为此,需要一种医用扳手,在使用前使用后,只需要医护人员进行简单操作即可进行消毒,保证医生在使用该扳手时为无菌无毒操作,同时,该扳手自带铁屑收集功能,且操作简单,有效防止拧螺丝时产生的铁屑对患者病灶处引起炎症,保证患者的生命安全。
技术实现要素:
3.针对上述技术问题,本发明提供了一种医用扳手,在使用前使用后,只需要医护人员进行简单操作即可进行消毒,保证医生在使用该扳手时为无菌无毒操作,同时,该扳手自带铁屑收集功能,且操作简单,有效防止拧螺丝时产生的铁屑对患者病灶处引起炎症,保证患者的生命安全。
4.本发明所使用的技术方案是:一种医用扳手,包括:壳体部分和工作部分;所述的壳体部分保护扳手内部结构;工作部分安装在壳体部分内;所述的壳体部分包括:外壳、伸缩底板和手柄;所述的伸缩底板滑动安装在外壳的下端开口处,伸缩底板的左右两侧端均可进行伸缩;手柄固定安装在外壳的上端面;所述的工作部分包括:夹头机构、动力机构、消毒机构;所述的夹头机构安装在外壳的下端开口处;动力机构安装在外壳内;消毒机构安装外壳内,位于夹头机构的一端。
5.优选的,所述的夹头机构包括:圆盘、圆杆、齿轮组、l形杆、支撑板、伸缩杆、卡杆和收集盒;所述的圆盘转动安装在伸缩底板上的圆孔里,圆盘的外围设有一圈轮齿;圆杆转动安装在外壳上端面的圆孔里,圆杆的下端设有一个齿轮;齿轮组转动安装在外壳内部顶板的圆孔里,且齿轮组上面的齿轮与圆杆下端的齿轮在扳手进行拧螺丝工作时相互啮合,齿轮组下面的齿轮与l形杆上的齿条相互啮合,l形杆有两个,两个l形杆滑动安装在圆盘上端面的两个槽孔里;支撑板有两个,两个支撑板分别固定安装在l形杆的侧面;伸缩杆的固定端与支撑板内部凹槽的上端固定连接,伸缩杆的活塞杆端与卡杆通过螺丝连接,伸缩杆上设有弹簧,卡杆的上半部分为卡槽,卡杆的下半部分为可收集碎屑的收集槽,收集槽的两侧上设有两个小杆;收集盒滑动安装在支撑板侧面的凹槽里,收集盒的上端设有三角形杆。
6.优选的,所述的圆杆的上端设有转动钮。
7.优选的,所述的动力机构包括:齿轮a和电机a;所述的齿轮a转动安装在外壳内部
上端面的圆孔里,齿轮a与圆盘外围的轮齿在扳手进行拧螺丝工作时相互啮合;电机a固定安装在外壳上,其电机轴与齿轮a通过同步带连接。
8.优选的,所述的消毒机构包括:支撑杆、齿条a、齿轮b、u形杆和螺纹杆;所述的支撑杆滑动安装在外壳上的长方形槽里,支撑杆的下端设有圆环,该圆环转动安装在圆盘上端面的圆形凹槽里,支撑杆的侧面设有一个把手;齿条a滑动安装在外壳的上端面,齿条a的一端与支撑杆固定连接;齿轮b的轴转动安装在外壳上端面的小板的圆孔里,齿轮b与齿条a相互啮合,齿轮b的一端设有一个锥形柱;u形杆滑动安装在外壳上的孔里;螺纹杆的下端转动安装,u形杆上一个杆子的圆孔里,齿轮b上的锥形柱与螺纹杆上的螺纹配合工作。
9.优选的,所述的u形杆的下端安装有紫外线消毒器。
10.本发明与现有技术相比的有益效果是:1.在进行拧螺丝工作时,首先人工需要将正好适合螺丝大小的卡杆拧到伸缩杆下端方块上,卡杆推动收集盒向支撑板的凹槽内移动,正好将螺丝拧住时,正好收集盒完全移动到支撑板的凹槽里,这样,收集盒对掉下的铁屑等物进行二次收集,保证碎屑收集干净,避免患者病灶处因为掉落的铁屑等杂质产生感染症状。
11.2.电机a工作,带动齿轮a转动, 齿轮a带动圆盘转动,则整个夹头机构转动,进行拧螺丝工作,节省人力,提高工作效率。
12.3.进行消毒工作时,人工拉动支撑杆侧面的把手,使得支撑杆向接近电机a的方向移动,这时,支撑杆整个夹头机构向接近电机a的方向移动,当夹头机构移动到u形杆位置时,u形杆上的紫外线消毒器正好位于两个支撑板的正下方,这时u形杆上的紫外线消毒器为支撑板及其上机构进行消毒工作;使医生使用该扳手时,为无菌无毒操作,为患者健康提供保障。
附图说明
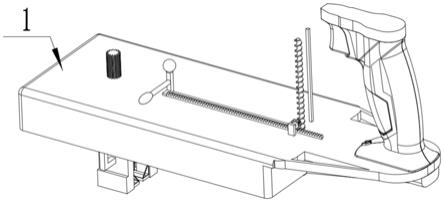
13.图1、图2为本发明的整体结构示意图。
14.图3为本发明的整体结构的内部结构示意图。
15.图4、图5为本发明的壳体部分结构示意图。
16.图6为本发明的工作部分结构示意图。
17.图7、图8为本发明的工作部分中的夹头机构示意图。
18.图9为本发明的工作部分中的动力机构和消毒机构示意图。
19.附图标号1-壳体部分;2-工作部分;101-外壳;102-伸缩底板;103-手柄;201-圆盘;202-圆杆;203-齿轮组;204-l形杆;205-支撑板;206-伸缩杆;207-卡杆;208-收集盒;209-齿轮a;210-电机a;211-支撑杆;212-齿条a;213-齿轮b;214-u形杆;215-螺纹杆。
20.具体实施方式
21.在本发明以下的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方
位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.在本发明以下的描述中,需要说明的是,除非另有明确规定和限定,术语“安装”、“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接连接,亦可以是通过中间媒介间接连接,可以是两个部件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.下面结合附图和示例性实施例对本发明作进一步地描述,在此通过发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。此外,如果已知技术的详细描述对于示出本发明的特征是不必要的,则将其省略。
24.请参阅图1-9所示,一种医用扳手,包括:壳体部分1和工作部分2;壳体部分1保护扳手内部结构,为医生操作提供方便;工作部分2安装在壳体部分1内,工作部分2可为扳手提供动力,同时防止扳手工作时有铁屑等杂质掉到病人病患处,引起不必要的炎症等症状;如图4、图5所示的壳体部分1包括:外壳101、伸缩底板102和手柄103;伸缩底板102滑动安装在外壳101的下端开口处,伸缩底板102的左右两侧端均可进行伸缩,保证外壳101内部杂质在医生操作扳手时,不会掉落到患者病灶处;手柄103固定安装在外壳101的上端面,手柄103可供医生抓握,并控制电力开关;4.如图6所示的工作部分2包括:夹头机构、动力机构、消毒机构;夹头机构安装在外壳101的下端开口处,夹头机构可将需要拧动的螺丝夹住,并防止在拧螺丝的时候出现的铁屑等杂质掉落到患者病灶处,引起炎症等不必要的麻烦;动力机构安装在外壳101内,动力机构主要为夹头机构在拧螺丝时提供动力;消毒机构安装外壳101内,位于夹头机构的一端,消毒机构为夹头机构进行消毒工作,保证医生使用扳手时,为无毒操作。
25.如图7、图8所示的夹头机构,圆盘201转动安装在伸缩底板102上的圆孔里,圆盘201的外围设有一圈轮齿;圆杆202转动安装在外壳101上端面的圆孔里,圆杆202的下端设有一个齿轮;齿轮组203转动安装在外壳101内部顶板的圆孔里,且齿轮组203上面的齿轮与圆杆202下端的齿轮在扳手进行拧螺丝工作时相互啮合,齿轮组203下面的齿轮与l形杆204上的齿条相互啮合;具体地,人工扭动该转动钮进行转动圆杆202,202带动203转动,203带动l形杆204移动;l形杆204有两个,两个l形杆204滑动安装在圆盘201上端面的两个槽孔里;支撑板205有两个,两个支撑板205分别固定安装在l形杆204的侧面;伸缩杆206的固定端与支撑板205内部凹槽的上端固定连接,伸缩杆206的活塞杆端与卡杆207通过螺丝连接,伸缩杆206上设有弹簧,卡杆207的上半部分为卡槽,卡杆207的下半部分为可收集碎屑的收集槽,收集槽的两侧上设有两个小杆;具体地,在进行拧螺丝工作时,首先人工需要将正好适合螺丝大小的卡杆207拧到伸缩杆206下端方块上,然后,手动转动圆杆202上的转动钮,圆杆202带动两个l形杆204同时相向移动,使得两个卡杆207正好与需要拧动的螺丝契合住,这样,在拧螺丝过中,如果有铁屑等杂质物掉下,会首先掉到卡杆207下端部分的收集槽内;收集盒208滑动安装在支撑板205侧面的凹槽里,收集盒208的上端设有三角形杆;具体地,卡杆207继续向下移动,当卡杆207收集槽两侧的小杆与收集盒208上的三角杆接触后,卡杆207推动收集盒208向支撑板205的凹槽内移动,正好将螺丝拧住时,正好收集盒208完全移动到支撑板205的凹槽里,这样,收集盒208对掉下的铁屑等物进行二次收集,保证碎屑收集干净。
26.如图7、图8所示的圆杆202的上端设有转动钮,人工可扭动该转动钮进行转动圆杆
202。
27.如图9所示的动力机构,齿轮a209转动安装在外壳101内部上端面的圆孔里,齿轮a209与圆盘201外围的轮齿在扳手进行拧螺丝工作时相互啮合;电机a210固定安装在外壳101上,其电机轴与齿轮a209通过同步带连接;具体地,电机a210工作,带动齿轮a209转动, 齿轮a209带动圆盘201转动。
28.如图9所示的消毒机构,支撑杆211滑动安装在外壳101上的长方形槽里,支撑杆211的下端设有圆环,该圆环转动安装在圆盘201上端面的圆形凹槽里,支撑杆211的侧面设有一个把手,医护人员可通过拉动该把手,来控制圆盘201在壳体部分1的下端滑动;齿条a212滑动安装在外壳101的上端面,齿条a212的一端与支撑杆211固定连接;齿轮b213的轴转动安装在外壳101上端面的小板的圆孔里,齿轮b213与齿条a212相互啮合,齿轮b213的一端设有一个锥形柱;u形杆214滑动安装在外壳101上的孔里;螺纹杆215的下端转动安装,u形杆214上一个杆子的圆孔里,齿轮b213上的锥形柱与螺纹杆215上的螺纹配合工作;具体地,进行消毒工作时,人工拉动支撑杆211侧面的把手,使得支撑杆211向接近电机a210的方向移动,这时,支撑杆211整个夹头机构向接近电机a210的方向移动,同时,齿条a212带动齿轮b213转动,齿轮b213带动螺纹杆215边转动边向下移动,则螺纹杆215带动u形杆214向下移动,当夹头机构移动到u形杆214位置时,u形杆214上的紫外线消毒器正好位于两个支撑板205的正下方,这时u形杆214上的紫外线消毒器为支撑板205及其上机构进行消毒工作;消毒完毕后,人工推动支撑杆211上的把手,使夹头机构归位。
29.如图9所示的u形杆214的下端安装有紫外线消毒器,可给扳手接触患者病灶的位置进行紫外线消毒。
30.工作原理:在医生使用该扳手进行工作前和工作完毕后,需要给扳手接触患者病灶的位置进行消毒,则人工拉动支撑杆211侧面的把手,使得支撑杆211向接近电机a210的方向移动,这时,支撑杆211整个夹头机构向接近电机a210的方向移动,同时,齿条a212带动齿轮b213转动,齿轮b213带动螺纹杆215边转动边向下移动,则螺纹杆215带动u形杆214向下移动,当夹头机构移动到u形杆214位置时,u形杆214上的紫外线消毒器正好位于两个支撑板205的正下方,这时u形杆214上的紫外线消毒器为支撑板205及其上机构进行消毒工作;消毒完毕后,人工推动支撑杆211上的把手,使夹头机构归位;进行拧螺丝工作时,首先人工需要将正好适合螺丝大小的卡杆207拧到伸缩杆206下端方块上,然后,手动转动圆杆202上的转动钮,圆杆202带动两个l形杆204同时相向移动,使得两个卡杆207正好与需要拧动的螺丝契合住,然后,电机a210工作,带动齿轮a209转动, 齿轮a209带动圆盘201转动,则整个夹头机构转动,进行拧螺丝工作;在拧螺丝过中,如果有铁屑等杂质物掉下,会首先掉到卡杆207下端部分的收集槽内;卡杆207继续向下移动,当卡杆207收集槽两侧的小杆与收集盒208上的三角杆接触后,卡杆207推动收集盒208向支撑板205的凹槽内移动,正好将螺丝拧住时,正好收集盒208完全移动到支撑板205的凹槽里,这样,收集盒208对掉下的铁屑等物进行二次收集,保证碎屑收集干净。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1