一种微变人体姿势的移乘装置
1.本发明涉及辅助器具领域,具体的涉及一种微变人体姿势的移乘装置。
背景技术:
2.随着老龄化问题日趋显著,对于康复养老辅具类的转乘产品的需求也不断增加,市场上养老康养辅具类产品也不断涌现,例如出现的康养助老产品功能有辅助起床、辅助如厕、辅助洗浴等。由于老年人身体机能随着年龄的增加而不断退化,缺乏运动能力,老年人在轮椅、床、马桶等多种场景的转移也成了一大问题。通过人工转移搬运老年人不仅对于搬运人员是一种负担而且会对老人身体造成不必要的损伤,也会对老年人的尊严有一定影响。
3.公开号为cn109571511a的专利公开了一种辅助起立移位机器人,它包括机器人底座,立座,座垫,顶膝,抱手架和推把,其中:立座安装在底座上,座垫,顶膝,抱手架和推把安装在立座上;第一开合脚轮架和第二开合脚轮架可转动的连接在底座后部两侧,第一开合脚轮架和第二开合脚轮架上分别安装有后轮;底座前部两侧分别安装有前轮。但是其存在一定的不足主要体现在:托抱过程中人体左右两侧腋下需要承受全部托抱力,而上肢其他部分不受力,并且手部没有抓握处,前胸和后背部位没有防护,腰部没有受到支撑,抱起过程中容易产生意外。
4.公开号为cn113041106a的专利公开了一种助行和移位机器人设备,它包括扶手结构、升降结构、站立推杆、底盘结构和踏板;扶手结构宽度能调节地设置在升降结构上;升降结构高度可调地铰接在底盘结构上,站立推杆长度可调地支撑在底盘结构和升降结构之间,踏板可拆卸地设置在底盘结构上。但是其存在一定的不足主要体现在:托抱力大部分依靠抓握手柄的抓力承担,并且其腰部和背部没有支撑部分,移位过程中臀部没有受到支撑,腿部始终保持受力状态,且极易发生后倾。
5.因此,急需研究一种移乘辅具,能够更好的解决现有技术中存在的移位困难、上肢支撑力差以及乘坐不舒适等问题。
技术实现要素:
6.为了解决上述现有技术的不足,本发明的目的在于提供一种结构简单、造价低的一种微变人体姿势的移乘装置,其能够解决现有移位机器人需要大幅度改变位姿、移位困难以及乘坐不舒适等问题。发明的微变人体姿势的移乘装置在移位过程中能够保证在人体姿态仅发生较小的改变情况下就能完成人体的转运,可以将托抱过程中的受力分布至腋下和双脚处,移位过程中将人体重力分布至腋下和臀下,能够保证移位时的舒适度。
7.具体地,本发明提供一种微变人体姿势的移乘装置,其包括全向移动底盘、上身托抱机构、升降机构、乘坐机构以及顶膝机构;所述上身托抱机构设置在所述全向移动底盘的上方,所述乘坐机构设置在所述上身托抱机构的下方,所述升降机构与所述上身托抱机构连接并能够带动所述上身托抱机构上下移动,所述顶膝机构与所述乘坐机构相对设置;
8.所述全向移动底盘包括底盘连接板、第一框架以及第二框架,所述第一框架和第二框架相互对称设置并且分别与所述底盘连接板连接,所述第一框架和第二框架的底部分别设置有移动装置;
9.所述上身托抱机构包括托抱框架连接管、第一托抱框架、第二托抱框架、胸靠、抱臂、背部支撑安全带、大臂支撑板、肘部支撑板以及握柄;所述第一托抱框架和第二托抱框架的第一端分别连接所述托抱框架连接管的一端,所述第一托抱框架和第二托抱框架的第二端分别连接所述背部支撑安全带的一端,所述背部支撑安全带与第一托抱框架和第二托抱框架连接的长度能够根据需要进行调节,所述背部支撑安全带与第一托抱框架和第二托抱框架的连接处设置有抱臂,所述第一托抱框架和第二托抱框架的中间位置设置有大臂支撑板、肘部支撑板以及握柄,大臂支撑板、肘部支撑板以及握柄均与所述第一托抱框架和第二托抱框架固定连接,所述托抱框架连接管、第一托抱框架、第二托抱框架以及背部支撑安全带形成环形结构,所述胸靠设置在所述环形结构的中间并借助于连接管分别与所述第一托抱框架和第二托抱框架固定连接;
10.所述升降机构包括驱动杆、u型导向杆以及滑轮组,所述u型导向杆的两端分别与所述第一框架和第二框架连接,所述滑轮组与所述u型导向杆组成移动副,所述驱动杆借助于连接杆与所述滑轮组及所述u型导向杆连接,每侧的滑轮组设置有三个滑轮,三个滑轮呈倒三角形布置,其中两个滑轮轴心连线与u型杆轴向垂直,另一个滑轮布置在下方内侧;
11.所述乘坐机构包括座板支撑框架以及乘坐座板,所述乘坐座板与所述座板支撑框架能转动连接,所述支撑框架与所述第一框架和第二框架连接,所述乘坐座板与所述座板支撑框架在连接处分别设置有弧形凸起以及弧形滑槽;
12.所述顶膝机构包括相邻设置的第一膝靠和第二膝靠,第一膝靠和第二膝靠分别包括膝盖护板以及连接件,两个连接件分别与所述第一框架和第二框架连接,两个膝盖护板分别安装在连接件上并且能够在连接件上进行上下位移及前后位移调节。
13.优选地,所述第一框架和第二框架均包括底盘斜向圆管以及底盘水平圆管,两个底盘斜向圆管的上端之间借助于底盘水平连接管连接,所述u型导向杆的下端插入所述底盘斜向圆管的上端内部,所述底盘斜向圆管的下部连接所述底盘水平圆管。
14.优选地,所述底盘水平圆管的底部借助于万向轮连接架连接有万向轮,所述万向轮设置有刹车装置。
15.优选地,所述背部支撑安全带设置有多个用于调节长度的安全带卡扣。
16.优选地,所述驱动杆与底盘水平连接管和所述连接杆直接通过销轴连接。
17.优选地,所述连接件包括护板支撑板、前后调节拉环销、弧形弯管、上下调节拉环销、上下调节杆、前后调节杆以及t形管,所述弧形弯管的第一端与所述底盘斜向圆固定连接,所述弧形弯管的第二端与所述上下调节杆固定连接,所述上下调节杆与所述前后调节杆固定形成所述t形管,所述前后调节杆与所述护板支撑板固定连接,所述护板支撑板与所述膝盖护板螺栓连接。
18.优选地,所述上下调节杆包括上下调节母杆和上下调节子杆,所述前后调节杆包括前后调节母杆和前后调节子杆,所述上下调节子杆与所述前后调节母杆彼此之间通过焊接固定在一起。
19.优选地,所述上下调节母杆和前后调节母杆均设置有定位孔,所述上下调节子杆
和前后调节子杆均设置有多级调节孔。
20.优选地,所述乘坐机构座板、抱臂、胸靠以及膝盖支撑处均设置有柔软材料。
21.优选地,所述弧形滑槽的角度为240度,所述弧形凸起角度为60度,弧形凸起能够在弧形滑槽内实现180度的开合,座板旋转轴设置为斜向。
22.优选地,所述驱动杆连接有驱动电机,所述驱动电机连接有上位控制器。
23.与现有技术相比,本发明的有益效果如下:
24.(1)本发明的一种微变人体姿势的移乘装置在移位过程中能够保证在人体姿态仅发生较小的改变情况下就能完成人体的转运,可以将托抱过程中的受力分布至腋下和双脚处,而不单单集中在上肢。移位过程中将人体重力分布至腋下和臀下,能够实现人体半坐立位姿转运,从而减小移位过程对位姿改变,同时半坐立状态下保证膝盖弯曲角度呈90度的舒适角度,最大程度减小托抱移位过程对老人身体的影响。
25.(2)本专利的整体结构简单,使用方便,在护理时仅需要一个护理人员即可,大大减轻了护理人员的工作量,其应用场景非常多,能够实现老年人或患者在马桶、轮椅、床等多场景之间的切换,广泛用于家庭、养老院和医疗机构等地方,结构简单,适合推广,能够节约护理成本及人力时间成本。
附图说明
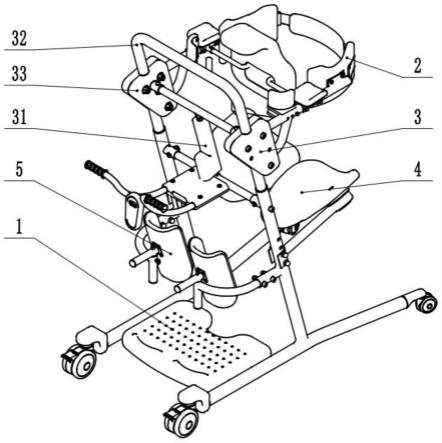
26.图1是本发明托抱状态的整体结构轴侧图;
27.图2是本发明的底盘移动框架轴侧图;
28.图3是本发明的上身托抱机构轴侧图;
29.图4是本发明的乘坐机构运动轨迹图;
30.图5是本发明实施状态的整体结构前视图;
31.图6是本发明转运状态的人体位姿示意图;
32.图7是本发明托抱过程的人体位姿示意图。
33.其中部分附图标记如下:
34.1-全向移动底盘、2-上身托抱机构、3-升降机构、4-乘坐机构、5-顶膝机构、11-底盘连接板、12-万向轮支架、13-万向轮、14-底盘水平连接管、15-底盘斜向圆管、16-底盘水平圆管、21-托抱框架连接管、22-胸靠、23-抱臂、24-背部支撑安全带、25-安全带卡扣、26-托抱框架、27-大臂支撑板、28-肘部支撑板、29-握柄、31-驱动杆、32-u型导向杆、33-滑轮组、41-座板支撑框架、42-乘坐座板、43-座板旋转销轴、51-前后调节拉环销、52-弧形弯管、53-上下调节拉环销、54-上下调节杆、55-膝盖护板、56-前后调节杆、57-t形管。
具体实施方式
35.以下,参照附图对本发明的实施方式进行说明。
36.如图1~图5所示,本发明提供一种微变人体姿势的移乘装置,其包括全向移动底盘1、上身托抱机构2、升降机构3、设置在上身托抱机构2下方的乘坐机构4以及设置在底盘脚踏板上方的顶膝机构5。上身托抱机构2设置在全向移动底盘1的上方,乘坐机构设置在上身托抱机构2的下方,升降机构3与上身托抱机构2连接并能够带动上身托抱机构2进行上下移动,顶膝机构5与乘坐机构4相对设置。其可以将托抱过程中的受力分布至腋下和双脚处,
移位过程中将人体重力分布至腋下和臀下,能够实现人体半坐立位姿转运,减小移位过程对位姿改变,同时半坐立状态下保证膝盖弯曲角度呈90度的舒适角度,最大程度减小托抱移位过程对老人身体的影响。
37.全向移动底盘1包括底盘连接板11、第一框架101以及第二框架102,第一框架101和第二框架102相互对称设置并且分别与底盘连接板11连接,第一框架101和第二框架102的底部分别设置有移动装置,移动装置可以是万向轮等,借助于移动装置能够实现整个装置的移动。
38.上身托抱机构2包括托抱框架连接管21、第一托抱框架201、第二托抱框架202、胸靠22、抱臂23、背部支撑安全带24、大臂支撑板27、肘部支撑板28以及握柄29。第一托抱框架201和第二托抱框架202的第一端分别连接托抱框架连接管21的一端,第一托抱框架201和第二托抱框架202的第二端分别连接背部支撑安全带的一端,背部支撑安全带与第一托抱框架201和第二托抱框架202连接的长度能够根据需要进行调节,背部支撑安全带与第一托抱框架201和第二托抱框架202的连接处设置有抱臂23,第一托抱框架201和第二托抱框架202的中间位置设置有大臂支撑板27、肘部支撑板28以及握柄29,大臂支撑板27、肘部支撑板28以及握柄29均与第一托抱框架201和第二托抱框架202固定连接,托抱框架连接管21、第一托抱框架201、第二托抱框架202以及背部支撑安全带形成环形结构,胸靠22设置在环形结构的中间并借助于连接管分别与第一托抱框架201和第二托抱框架202固定连接。
39.升降机构3包括驱动杆、u型导向杆以及滑轮组,u型导向杆的两端分别与第一框架和第二框架连接,滑轮组与u型导向杆组成移动副,驱动杆借助于连接杆与滑轮组及u型导向杆连接。每侧的滑轮组设置有三个滑轮,三个滑轮呈倒三角形布置,其中两个滑轮轴心连线与u型杆轴向垂直,另一个滑轮布置在下方内侧。滑轮组的设置能够更好的使升降机构3进行升降,利用最少的机械结构即能够实现升降。
40.乘坐机构4包括座板支撑框架以及乘坐座板,乘坐座板与座板支撑框架能转动连接,支撑框架与第一框架101和第二框架102连接,乘坐座板与座板支撑框架在连接处分别设置有用于限位的弧形凸起以及弧形滑槽。弧形滑槽的角度为240度,弧形凸起角度为60度,弧形凸起能够在弧形滑槽内实现180度的开合,座板旋转轴设置为斜向。弧形凸起以及弧形滑槽的设置能够方便坐板旋转打开或闭合。
41.顶膝机构5包括相邻设置的第一膝靠501和第二膝靠502,第一膝靠501和第二膝靠502分别包括膝盖护板以及连接件,两个连接件分别与第一框架101和第二框架102连接,两个膝盖护板分别安装在连接件上并且能够在连接件上进行上下位移及前后位移调节。
42.优选地,第一框架和第二框架均包括底盘斜向圆管以及底盘水平圆管,两个底盘斜向圆管的上端之间借助于底盘水平连接管连接,u型导向杆的下端插入底盘斜向圆管的上端内部,底盘斜向圆管的下部连接底盘水平圆管。
43.连接件包括护板支撑板、前后调节拉环销51、弧形弯管52、上下调节拉环销53、上下调节杆54、前后调节杆56以及t形管57,弧形弯管52的第一端与底盘斜向圆管固定连接,弧形弯管52的第二端与上下调节杆54固定连接,上下调节杆54与前后调节杆56固定形成t形管57,前后调节杆56与护板支撑板固定连接,护板支撑板与膝盖护板螺栓连接。
44.上下调节杆54包括上下调节母杆和上下调节子杆,前后调节杆56包括前后调节母杆和前后调节子杆,上下调节子杆与前后调节母杆彼此之间通过焊接固定在一起。
45.上下调节母杆和前后调节母杆均设置有定位孔,上下调节子杆和前后调节子杆均设置有多级调节孔。
46.具体实施例
47.全向移动底盘11包括底盘水平圆管16、底盘斜向圆管15、底盘连接板11、底盘水平连接管14、万向轮13及其万向轮支架12,底盘水平圆管16与底盘斜向圆管15呈一定角度通过焊接连接,组成底盘左右框架,左右框架对称放置,通过底盘水平连接管14和底盘连接板11以螺栓方式连接,底盘水平圆管16两端设置有万向轮支架12,通过焊接连接,万向轮支架12与万向轮13通过螺栓连接,其中前端万向轮具有刹车功能。
48.上身托抱机构22包括托抱框架26、上身包覆结构和环抱支撑部分,其中托抱框架包括左右两侧托抱框架26和托抱框架连接管21,上身包覆结构包括左右抱臂23、胸靠22、背部支撑安全带24及安全带卡扣25,托抱框架26与抱臂23和胸靠22通过螺栓连接,安全带卡扣25与抱臂23通过螺钉连接,环抱支撑部分包括大臂支撑板27、肘部支撑板28和握柄29,三者位置分布与人体背抱时相同,形成仿人体背抱,托抱框架26与滑轮组通过螺栓连接,滑轮组33与u型导向杆32上组成移动副。
49.升降机构3包括驱动杆31、u型导向杆32,驱动杆31放置在中间位置,其尾端与底盘水平连接管14通过销轴连接,底盘水平连接管14与底盘斜向圆管15通过螺栓连接,前端与托抱框架连接管21通过销轴连接,托抱框架连接管21与左右两侧托抱框架26通过螺栓连接,u型导向杆32插装在底盘斜向圆管15内,通过螺栓与底盘1固定连接,托抱框架26与u型导向杆32通过滑轮组成移动副,驱动杆31驱动托抱框架26上下移动。
50.乘坐机构4包括座板支撑框架41、乘坐坐板42和座板旋转销轴43,其中座板支撑框架41与座板42通过座板旋转销轴43连接,座板支撑框架41与底盘斜向圆管15通过螺栓连接,座板旋转中心处设置有弧形凸起和弧形滑槽,用于乘坐座板开合限位。
51.顶膝机构5由弧形弯管、上下调节结构、前后调节结构和膝盖护板三者串联而成,膝盖护板55作为末端可以实现上下前后位置的调节,每个方向的调节机构均由两段圆管组成,其中弧形弯管52一端与底盘斜向圆管15通过焊接连接,另一端与上下调节杆54通过焊接连接,上下调节子杆与前后调节母杆成t形焊接成t形管57,前后调节子杆与护板支撑板通过焊接连接,护板支撑板与膝盖护板55通过螺栓组连接,每个调节机构通过圆管嵌套与销轴组成移动副,通过调节销轴与多级孔位的配合实现膝盖护板55到达合适的空间位置。
52.本发明的工作流程具体为:
53.如图6至图7所示,在使用时,需要配备一名护理人员辅助操控该移位装置,护理人员首先要将老人或其他需要移位的人员转换为坐姿,然后将坐板向外展开从而使坐板位于座位两侧,之后推动移位装置至床边,并正对人体正前方放置,人体首先将双脚放至底部踏板上,之后调节顶膝机构的两个拉环销使膝盖紧贴膝靠处的海绵,人体双臂呈环抱姿态,双手紧握握柄,之后调节后背处的安全带至合适位置从而保证人体不会向后倾斜,同时护理人员锁紧两个定向轮的刹车,操纵上升按键使升降机构带动上半身托抱机构缓缓升起,上升至合适位置后结束上升动作并松开定向轮的刹车,将移位机器人连同人体缓慢从床边向外拉出,并将座板旋转至合适位置(即位于人体臀部下方)后卡紧锁紧机构,最后操控下降按键借助于上半身托抱机构的下降将人体上半身缓慢向下移使人体臀部位于座板上,至此完成了整个移位过程,之后打开定向轮的刹车,即可以将移位装置移动到目的地,之后将坐
板打开并借助于上半身托抱机构带动人体上升,将人体放置在目的地的床上,完成整个移位过程。
54.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1