一种基于大数据的心内科介入术后肢体护理装置
1.本发明涉及医疗用品技术领域,具体涉及一种基于大数据的心内科介入术后肢体护理装置。
背景技术:
2.心内科介入术主要是通过一些微创的非全麻方式,对患者的心血管疾病进行治疗。这种介入治疗,常规采取方式是通过外周一些血管,包括动脉或者静脉的穿刺,然后通过一些特殊的器械去解决我们心血管疾病中常见的,比如:血管的狭窄、先天性心脏病的封堵、心律失常的射频消融治疗,这就是经常说的叫介入治疗。
3.其中,经桡动脉路径的心脏介入术具有穿刺成功率高、创伤小、术后无体位限制等优点,易于被医生和患者接受,是最常用的路径。
4.在医生完成介入手术之后对桡动脉穿刺处需要进行压迫止血,研究表明,压迫止血时间过短或压力过低,容易造成局部出血、血肿,压迫时间过长或压力过高,则阻碍术侧肢体血液循环,引起肢体疼痛、发麻、发绀,甚至坏死,影响患者的手术效果和生活质量;同时患者在术后恢复的过程中需要长时间卧床休息,这使得患者不能正常的进行排泄活动,从而影响身体恢复。
5.然而,现有技术情况下对于穿刺处的压迫止血操作完全依赖于医护人员,这使得医护人员不能及时且有效地为每一个患者提供针对性的护理(包括但不限于:穿刺处的压迫力度、穿刺处的压迫时间、患者术肢的状况以及患者身体的生理状态);同时传统护理方式中,患者在护理床上进行排泄时容易弄脏护理床,这是十分不卫生的。
技术实现要素:
6.本发明的目的是为了解决现有技术中存在的缺点,解决上述背景技术中提出的问题。
7.为了实现上述目的,本发明采用了如下技术方案:一种基于大数据的心内科介入术后肢体护理装置,其特征在于:包括护理床,所述护理床上还设有与之配合的止血组件、护理组件、检测组件和控制组件;所述护理床采用电驱动的方式调节其形态,所述护理床包括床架、第一垫板、第二垫板、第三垫板、第四垫板、双轴转动座、双轴电机和活动板,所述第二垫板水平式地固定在床架上,所述第一垫板转动连接在第二垫板靠近床架首端的一侧,所述第三垫板转动连接第二垫板靠近床架尾端的一侧,所述第四垫板转动连接在第三垫板上,所述第一垫板、第四垫板的外端端部上分别设有与地面垂直的床头板、床尾板,所述第二垫板的中部开设有上、下贯穿的通槽,所述第一垫板、第二垫板、第三垫板和第四垫板的板面沿护理床的中线上均设有双轴转动座,所述双轴转动座上均转动有两个对应的活动板;所述床架位于其中线的首端、尾端均转动连接有电控液压杆,两个所述电控液压杆的顶端分别转动连接在第一垫板、第三垫板的底部;
所述第三垫板的横向两端均设有用于驱动第四垫板旋转的伺服电机;所述第二垫板上还对称地设有一对与通槽相配合的电控密封门;所述护理组件包括排泄单元和补水单元;所述排泄单元包括排泄单元包括收集箱、雾化喷头、输送泵、负压泵和过滤盒;所述补水单元包括储水箱、软管、水泵和吸嘴;所述护理床处于患者非术肢侧的护栏上还设有与吸嘴配合的夹持座;所述检测组件包括心电仪监护仪、指夹和摄像头;所述控制组件包括微型计算机、平板显示器和备用电源;所述微型计算机与云端服务器之间通过5g安全信道实现实时无线通信,所述云端服务器中内置有人工智能。
8.更进一步地,所述床架底端的顶角处均设有滚轮;所述双轴转动座内部均设有双轴电机,所述双轴电机上的两个输出轴分别与对应的活动板连接,并且所述双轴电机上的两个输出轴的状态相互独立。
9.更进一步地,所述活动板上均设有与之匹配的床垫,所述床架的横向两侧均设有护栏。
10.更进一步地,所述止血组件包括伸缩式托板、弧形板、微型气泵、气囊、液压推杆和柔性压块,所述伸缩式托板上端板面呈弧形下凹状,所述弧形板同轴式地固定架设在伸缩式托板上,所述弧形板的中部设有径向的液压推杆,并且所述液压推杆的中轴线垂直伸缩式托板底部的板面,所述柔性压块设置在液压伸缩杆的自由端端部,所述弧形板的内侧板面、伸缩式托板对应弧形板的区域上均设有气囊,所述气囊分别由对应的微型气泵驱动。
11.更进一步地,所述柔性压块作用端的内部埋设有压力传感器,所述气囊内部均设有气压传感器,所述伸缩式托板的支撑部表面均设有柔性垫体。
12.更进一步地,所述收集箱设置在床架上,所述收集箱的顶部向内凹陷式地开设有便池,所述便池的池口设有与之匹配的罩壳,所述罩壳的顶端与通槽下端的槽口之间可拆卸且密封式地连接,所述收集箱内部开设有相互隔绝的清水腔、污水腔,所述污水腔与便池之间通过单向阀导通,所述输送泵、负压泵的输入端分别与清水腔、污水腔连通,所述罩壳上对称地设有一圈雾化喷头,所述雾化喷头均连接在输送泵输入端上,所述过滤盒连接在负压泵的输出端;所述储水箱设置在床架上,所述储水箱上引出有软管,所述吸嘴设置在软管的外端端部,所述水泵设置储水箱上。
13.更进一步地,所述罩壳内壁上对称地分布有紫外灯,所述便池的表面设有特氟龙涂层,所述清水腔、污水腔和储水箱中均设有液位传感器。
14.更进一步地,所述心电监护仪设置在床架上,所述床头板和床尾板上均设有拍摄护理床的摄像头,所述摄像头还内置有红外传感器,所述指夹与心电监护仪之间通过导线信号连接。
15.更进一步地,所述微型计算机和备用电源均设置在床架上,所述平板显示器转动连接在其中任意一个护栏上。
16.更进一步地,所述平板显示器的正、反两面均设有触摸显示屏,所述平板显示器内置有陀螺仪传感器,所述平板显示器上还设有扬声器和麦克风。
17.与现有技术相比,本发明的优点和积极效果在于:本发明通过增加护理床,护理床上还设有与之配合的止血组件、护理组件、检测组件和控制组件;护理床采用电驱动的方式调节其形态,止血组件包括伸缩式托板、弧形板、微型气泵、气囊、液压推杆和柔性压块,柔性压块作用端的内部埋设有压力传感器,气囊内部均设有气压传感器,护理组件包括排泄单元和补水单元,排泄单元包括排泄单元包括收集箱、雾化喷头、输送泵、负压泵和过滤盒,补水单元包括储水箱、软管、水泵和吸嘴,罩壳内壁上对称地分布有紫外灯,便池的表面设有特氟龙涂层,清水腔、污水腔和储水箱中均设有液位传感器,护理床处于患者非术肢侧的护栏上还设有与吸嘴配合的夹持座,检测组件包括心电仪监护仪、指夹和摄像头,控制组件包括微型计算机、平板显示器和备用电源,板显示器上还设有扬声器和麦克风,微型计算机与云端服务器之间通过5g安全信道实现实时无线通信,云端服务器中内置有人工智能的设计。
18.这样可以大量的患者护理数据对人工智能进行训练,从而通过人工智能对患者的具体身体数据进行综合性评估并作出相应的预测数据(包括但不限于:患者出现心率异常、血压异常、血氧异常、血栓的概率以及事件发生的时间等等),同时输出针对性的护理建议;此外,护理组件的设立可以使得患者在护理床上排泄过程是干净卫生的。
19.达到有效地提升本发明对心内科患者进行术后护理时的针对性、精准性和卫生性等效果。
20.本发明通过改进的基于卷积神经网络算法实现对患者表情的精确检测,避免因遮挡等导致的识别不精确,获得鲁棒、高效的人脸特征表示,从而实现对患者术中、术后的安全、有效治疗。
附图说明
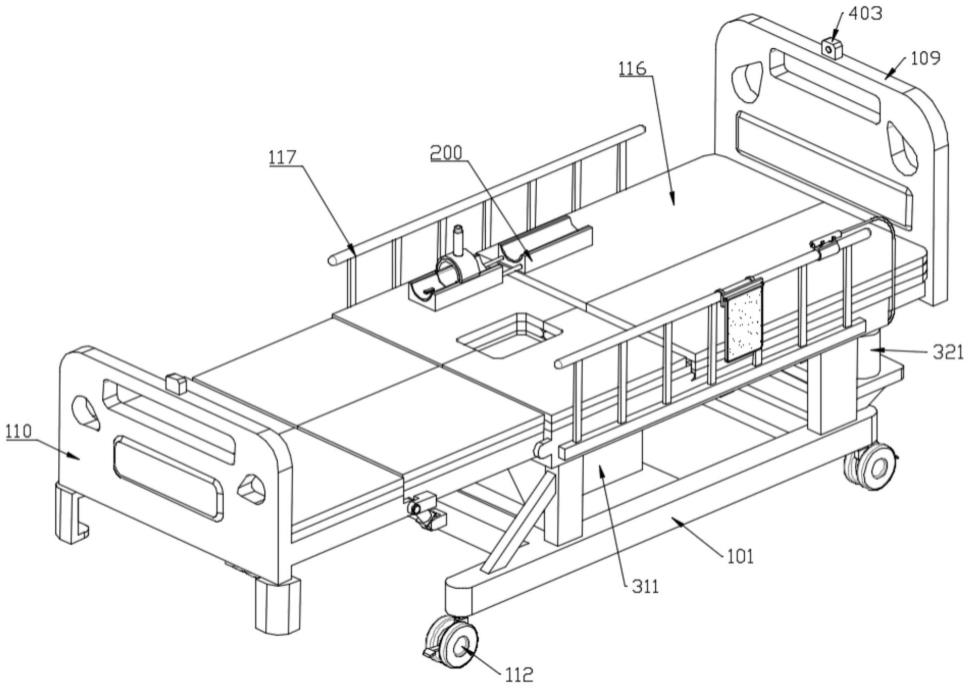
21.图1为本发明第一视角下护理床处于完全平整状态时的直观图;图2为本发明第二视角下护理床与床垫、止血组件的爆炸视图;图3为本发明第三视角下护理床一侧活动板旋升时的直观图;图4为本发明第四视角下护理床去除活动板后呈折叠状态时的直观图;图5为本发明第五视角护理床与活动板的爆炸视下图;图6为本发明第六视角下第二垫板上其中一个双轴转动座经过部分剖视后的直观图;图7为本发明第七视角下止血组件的直观图;图8为本发明第八视角下柔性压块经过部分剖视后的直观图;图9为本发明中气囊的部分剖视截面图;图10为本发明第九视角下排泄单元的直观图;图11为本发明第十视角下收集箱经过部分剖视后的直观图;图12为本发明第十一视角下补水单元的直观图;图13为本发明的便池的部分剖视截面图;图14为本发明第十二视角下控制组件的直观图;图15为本发明第十三视角下平板显示器的直观图;图16为本发明第十四视角下检测组件的直观图;
图中的标号分别代表:100-护理床;101-床架;102-第一垫板;103-第二垫板;104-第三垫板;105-第四垫板;106-双轴转动座;107-双轴电机;108-活动板;109-床头板;110-床尾板;111-通槽;112-滚轮;113-电控液压杆;114-伺服电机;115-电控密封门;116-床垫;117-护栏;200-止血组件;201-伸缩式托板;202-弧形板;203-微型气泵;204-气囊;205-液压推杆;206-柔性压块;207-压力传感器;208-气压传感器;209-柔性垫体;300-护理组件;310-排泄单元;311-收集箱;312-雾化喷头;313-输送泵;314-负压泵;315-过滤盒;320-补水单元;321-储水箱;322-软管;323-水泵;324-吸嘴;331-便池;332-罩壳;333-清水腔;334-污水腔;335-单向阀;336-紫外灯;337-特氟龙涂层;338-液位传感器;339-夹持座;400-检测组件;401-心电仪监护仪;402-指夹;403-摄像头;500-控制组件;501-微型计算机;502-平板显示器;503-备用电源;504-扬声器;505-麦克风。
具体实施方式
22.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
23.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开说明书的具体实施例的限制。
24.本实施例的一种基于大数据的心内科介入术后肢体护理装置,参照图1-16:包括护理床100,护理床100上还设有与之配合的止血组件200、护理组件300、检测组件400和控制组件500。
25.(一)护理床100采用电驱动的方式调节其形态,护理床100包括床架101、第一垫板102、第二垫板103、第三垫板104、第四垫板105、双轴转动座106、双轴电机107和活动板108,第二垫板103水平式地固定在床架101上,第一垫板102转动连接在第二垫板103靠近床架101首端的一侧,第三垫板104转动连接第二垫板103靠近床架101尾端的一侧,第四垫板105转动连接在第三垫板104上,第一垫板102、第四垫板105的外端端部上分别设有与地面垂直地床头板109、床尾板110,第二垫板103的中部开设有上、下贯穿的通槽111,第一垫板102、第二垫板103、第三垫板104和第四垫板105的板面沿护理床100的中线上均设有双轴转动座106,双轴转动座106上均转动有两个对应地活动板108。
26.(一-一)床架101底端的顶角处均设有滚轮112,这样当患者发生紧急情况需要抢救时,医护人员可以直接推动护理床100将患者转运至抢救室中,从而节省转运时间来提升抢救成功率。
27.值得注意的是:在本发明中滚轮112上均设有电控刹车件,并且电控刹车件均由微型计算机501控制,这样医护人员便可以通过平板显示器502来遥控电控刹车件的开启或关闭或抱紧程度。
28.(一-二)床架101位于其中线的首端、尾端均转动连接有电控液压杆113,两个电控液压杆113的顶端分别转动连接在第一垫板102、第三垫板104的底部。这样医护人员便可以通过平板显示器502来向微型计算机501发出指令,然后微型计算机501向电控液压杆113发出伸缩指令,从而使得电控液压杆113伸缩指定的长度。
29.(一-三)第三垫板104的横向两端均设有用于驱动第四垫板105旋转的伺服电机114;这样医护人员便可以通过平板显示器502来向微型计算机501发出指令,然后微型计算机501向伺服电机114发出旋转指令,从而使得第四垫板105相对第三垫板104旋转指定的角度。
30.(一-四)双轴转动座106内部均设有双轴电机107,双轴电机107上的两个输出轴分别与对应的活动板108连接,并且双轴电机107上的两个输出轴的状态相互独立。这样医护人员便可以通过平板显示器502来向微型计算机501发出指令,然后微型计算机501向双轴电机107发出旋转指令,从而使得护理床100横向一侧的活动板108旋升一定的角度(同时护理床100横向另一侧的活动板108保持不变),从而让患者可以侧躺着卧床休息,从而提升患者在康复期的舒适性在本实施例中,双轴电机107的两个输出轴上均设有受微型计算机501控制的离合器。
31.(一-五)第二垫板103上还对称地设有一对与通槽111相配合的电控密封门115,这样微型计算机501便可以通过控制电控密封门115来决定通槽111的开闭,即只有在患者需要排泄时通槽111才是处于导通的状态,从而避免便池331中污浊的气体上升而污染床垫116。
32.(一-六)活动板108上均设有与之匹配的床垫116,这样可以使得患者能够舒适地躺在护理床100上进行术后恢复,同时当床垫116脏污时可以及时地更换,从而确保护理床100的干净卫生。
33.床架101的横向两侧均设有护栏117,这样可以有效地避免患者在术后康复的后期从护理床100上因翻身不小心掉落下去,从而确保患者的安全;同时当需要对患者的肢体进行制动时,护栏117也是一个很好的锚定物。
34.(一-七)综合上述(一)、(一-二)、(一-三)和(一-四),医护人员可以通过平板显示器502来驱动电控液压杆113、伺服电机114、双轴电机107,从而切换护理床100的形态,这对患者在术后康复的后期,可以帮助患者坐立在护理床100上进行康复训练或者进食、排泄等等。
35.(二)止血组件200包括伸缩式托板201、弧形板202、微型气泵203、气囊204、液压推杆205和柔性压块206,伸缩式托板201上端板面呈弧形下凹状,弧形板202同轴式地固定架设
在伸缩式托板201上,弧形板202的中部设有径向的液压推杆205,并且液压推杆205的中轴线垂直伸缩式托板201底部的板面,柔性压块206设置在液压伸缩杆的自由端端部,弧形板202的内侧板面、伸缩式托板201对应弧形板202的区域上均设有气囊204,气囊204分别由对应的微型气泵203驱动。
36.其中,采用液压推杆205的原因为:液压具有重量轻、体积小、运动惯性小、反应速度快、操纵控制方便、可实现大范围的无级调速、可自动实现过载保护等优点。
37.值得注意的是:柔性压块206作用端的内部埋设有压力传感器207,这样微型计算机501便可以通过压力传感器207实时监测柔性压块206对穿刺处的压力大小。气囊204内部均设有气压传感器208,这样微型计算机501便可以通过气压传感器208实时监测气囊204对患者手腕的压力大小。伸缩式托板201的支撑部表面均设有硅胶材质的柔性垫体209,这样可以提升患者将患肢防止在伸缩式托板201上时的舒适性。
38.(三)护理组件300包括排泄单元310和补水单元320。
39.(三-一)排泄单元310包括排泄单元310包括收集箱311、雾化喷头312、输送泵313、负压泵314和过滤盒315,收集箱311设置在床架101上,收集箱311的顶部向内凹陷式地开设有便池331,便池331的池口设有与之匹配的罩壳332,罩壳332的顶端与通槽111下端的槽口之间可拆卸且密封式地连接,收集箱311内部开设有相互隔绝的清水腔333、污水腔334,污水腔334与便池331之间通过单向阀335导通,输送泵313、负压泵314的输入端分别与清水腔333、污水腔334连通,罩壳332上对称地设有一圈雾化喷头312,雾化喷头312均连接在输送泵313输入端上,过滤盒315连接在负压泵314的输出端。
40.值得注意的是:罩壳332内壁上对称地分布有两个紫外灯336,这样当电控密封门115将通槽111封闭时,微型计算机501便可以通过启动紫外灯336来对便池331和罩壳332进行照射消毒,从而维持便池331和罩壳332内壁的干净卫生。
41.值得注意的是:便池331的表面设有特氟龙涂层337,这样便可以使得便池331的表面十分光滑,即患者的排泄物不会粘附在便池331上,从而保证便池331的卫生性。
42.值得注意的是:清水腔333和污水腔334储水箱321中均设有液位传感器338,这样微型计算机501便可以通过液位传感器338来分别监测清水腔333、污水腔334中清水、污水的体积,从而及时地提醒医护人员(提醒方式包括但不限于:微型计算机501将液位传感器338的信息显示在平板显示器502的触摸显示屏上,通过扬声器504发出语音报警,通过无线通信的方式将信息发送给护士站的中控系统)对清水腔333进行清水补充、对污水腔334中的污水进行清空。
43.(三-二)补水单元320包括储水箱321、软管322、水泵323和吸嘴324,储水箱321设置在床架101上,储水箱321上引出有软管322,吸嘴324设置在软管322的外端端部,水泵323设置储水箱321上。
44.值得注意的是:储水箱321中设有液位传感器338,这样微型计算机501便可以通过液位传感器338来监测储水箱321中饮用水的水量,从而及时地提醒医护人员对储水箱321进行饮用水补充。
45.值得注意的是:护理床100处于患者非患肢侧的护栏117上还设有与吸嘴324配合的夹持座339,这样患者在喝完水后便可以将吸嘴324卡接在夹持座339上,同时当患者需要喝水时,患者也可以用非术侧的手来拿取吸嘴324。
46.(四)检测组件400包括心电仪监护仪401、指夹402和摄像头403,心电监护仪设置在床架101上,床头板109和床尾板110上均设有拍摄护理床100的摄像头403,摄像头403还内置有红外传感器,指夹402与心电监护仪之间通过导线信号连接。
47.设置心电监护仪和指夹402的原因为:由于心内科介入术后患者的身体可能会出现迷走神经反射性低血压,因此,所有患者在术后拔出动脉鞘管时需要对患者采取心电监护措施来严密的监视患者心率、血压和血氧的变化情况,如果出现心率失常、心肌缺血以及血压波动情况时,需要立即对患者进行流量吸氧,并且遵医嘱快速补充血容量静脉注射阿托品1~2mg,在1~2min内如果患者的心率没有继续增加,血压没有回升的时候需要再次追加阿托品2 mg,并且输入代血浆来维持患者有效的循环血量,嘱咐患者在进食时不能过饱,在手术后护理人员应当鼓励患者进食进水,并且做到少量多饮(这里鼓励患者少量多饮后,患者必然需要定时定量的排泄,那么正好与上述的补水单元320和排泄单元310进行配合)。
48.设置摄像头403的原因为:患者在介入术后还需要预防肢体血栓的出现,如果患者有血栓的出现会严重的延误患者康复的时间,严重可能会危及患者的生命安全。对于此类并发症需要采取的措施具体如下:
①
在患者进行手术之后需要进行抗凝剂的使用,来防止血栓的形成。
②
护理人员需要询问患者的术侧肢体是否麻木,并且检查患者肢体的灵活程度,再依据患者的具体情况来进行局部按摩,并且观察患者穿刺术肢的颜色和温度,让患者注意保暖。
③
患者如果在术后出现持续性的足背动脉搏动减弱、怕冷以及肢体麻木的现象时,此类现象都是提示有早期血栓的形成,所以需要医护人员采取相应的溶栓具体措施来防止血栓的形成。
④
护理人员需要嘱咐患者多卧床休息,尽量减少活动,这样才能够有效防止血栓脱落,患者需要抬高下肢,高度要高于心脏水平,从而促进静脉回流。
49.其中,摄像头403正好可以用于拍摄患者术肢的颜色、温度、运动状态等数据,这样微型计算机501可以通过人脸识别算法和运动算法来检测患者的表情(通过表情解读患者是否处于痛苦或不适的状态)和运动状态(通过肢体语言解读患者是否处于痛苦或不适的状态,同时也可以判断患者是否擅自活动,从而及时地发出报警)。
50.由于在摄像头拍摄时,存在受外界遮挡的情况,因而影响人脸识别结果,如何获得鲁棒、高效的人脸特征表示是提高人脸识别效果的关键性因素。卷积神经网络既可用来提取全局特征,也可用来提取局部特征,是目前主流的图像识别算法。作为一个示例性的方案,所述人脸识别算法基于摄像头的图像传感器系统,具体包括如下步骤:步骤1:人脸图像采集,摄像头对准人脸,实现对人脸图像的采集;步骤2:超分辨率重建;将采集的图像裁剪为统一大小,再将模糊的图片和清晰的图片组合成一个图片对,然后将原始图片和模糊后的图片合并,进一步划分为训练集和测试集,最后,用验证集数据和训练好的模型进行验证;步骤3:构建卷积神经网络进行人脸识别;所述卷积神经网络包括卷积层、最大池
化层、残差单元、平均池化层、以及分类层;平均池化层输出的特征向量作为提取到的人脸特征向量x,然后将它输入到分类器进行人脸识别,设wd和bd分别表示分类层的权重矩阵和偏差向量,d表示人脸的总类别数,则分类层可以表示为:yd=wdx+bdꢀꢀꢀꢀ
(1)
ꢀꢀꢀ
(2)其中,为人脸特征向量的简单非线性映射,表示向量中的第j个原始,n表示人脸总类别数的第n类,max(
·
)函数利用向量技术人脸特征向量x属于每一类别的概率分布,在得到概率向量后,模型通过下式判断输入图像i属于第n
num
类从而实现人脸识别;
ꢀꢀ
(3)。
51.(五)控制组件500包括微型计算机501、平板显示器502和备用电源503,微型计算机501和备用电源503均设置在床架101上,平板显示器502转动连接在其中任意一个护栏117上。
52.平板显示器502的正、反两面均设有触摸显示屏,这样医护人员便可以通过触摸显示屏来方便地向微型计算机501发出指令,同时也可以从触摸显示屏上获得其他部件的数据(包括但不限于:心电监护仪的测量数据、液位传感器338的数据、人脸识别算法的分析结果、运动算法的分析结果、备用电源503的电量、雾化喷头312的工作状态、输送泵313的工作状态、负压泵314的工作状态、水泵323的工作状态、紫外灯336的工作状态、电控液压杆113的工作状态、伺服电机114的工作状态、双轴电机107的工作状态等等)。
53.此外,平板显示器502还内置有陀螺仪传感器,这样当医护人员在实际护理过程中翻转平板显示器502时,微型计算机501便可以通过陀螺仪传感器检测平板显示器502的姿态,从而使得平板显示器502上只有朝向护理床100外侧且朝向垂直方向上方的触摸显示屏是点亮的状态。
54.平板显示器502上还设有扬声器504和麦克风505,这样微型计算机501可以通过扬声器504向患者或医护人员发出语音提示,同时通过麦克风505接收患者或医护人员的语音指令。
55.微型计算机501与云端服务器之间通过5g安全信道实现实时无线通信,因为5g在通信方面具有高速度、泛在网、低功耗、低时延和万物互联等优点。
56.云端服务器中内置有人工智能;这样云端服务器可以通过人工智能对每个患者的身体数据进行分析并做出预测(判断患者出现血压、血氧、心率、血栓等等问题的概率),从而辅助医护人员对患者进行精准地针对性护理。
57.值得注意的是:这里的人工智能是基于深度卷积网络并训练好的,其实现的原理和阿尔法狗类似,这样云端服务器可以构建出一个庞大的数据库(专门针对心内科介入术后的不同患者、不同的护理策略),当微型计算机501将患者的身体数据上传至云端服务器时,人工智能便可以基于以往的训练成果对患者进行综合评估,从而输出针对性的护理建议,同时人工智能对每一个患者进行实时评估时,其也在不断学习,从而不断地让自己进化
迭代。
58.(六)本发明的具体工作原理为:(六-一)准备工作:s1,医护人员将完成心内科介入术后的患者平躺式得放置在护理床100上。
59.此时,护理床100处于完全平整的状态,即第一垫板102、第二垫板103、第三垫板104和第四垫板105保持共面的状态。
60.s2,医护人员将伸缩式托板201放置护理床100上并位于患者的术肢侧,然后医护人员调节伸缩式托板201至合适的长度,然后将患者的术肢平整的放置在伸缩式托板201上。
61.s3,医护人员将患者的手腕(因为桡动脉的穿刺处位于手腕处)穿过弧形板202并使得穿刺处正对柔性压块206,然后医护人员通过平板显示器502指令微型气泵203和液压推杆205启动,从而将患者的手腕固定住并且对穿刺处进行压迫止血。
62.此过程中,患者术肢侧的胳膊上臂同样位于伸缩式托板201上,即患者术肢侧的整条手臂处于伸直的状态,这样可以有效地避免患者的术肢胳膊弯曲,从而避免因血流不畅引起血栓。
63.s4,医护人员将指夹402夹持在患者的手指,从而让心电监护仪监测患者的心率、血压和血氧等数据。
64.s5,医护人员通过平板显示器502指定微型计算机501进入自动护理模式,微型计算机501指令摄像头403启动,从而采集患者的表情和肢体语言数据。
65.(六-二)止血组件200的工作原理:s6,微型计算机501通过内部的时钟计时,每过指定时长就指令液压推杆205收缩指定的长度(在压力传感器207的配合下),从而对穿刺处进行指定时长的放松。
66.通常止血组件200每2小时放松1次,每次放松2~3 min,共放松3次,第3次放松后如没有出血,可拆除止血组件200并观察。如果放松柔性压块206时有出血(判断依据来自于医护人员对穿刺处的肉眼观察,或者是摄像头403拍摄到的穿刺点影像数据分析结果),则按原有力度继续压紧1 h,1 h后再按常规方法进行放松。
67.(六-三)补水单元320的工作原理:s7,微型计算机501通过内部的时钟计时,每过指定时长就指令扬声器504发出语音提示,从而提醒患者进行补水。
68.s8,患者用健康侧的手从夹持座339上取下吸嘴324,然后患者发出准备完毕的语音指令,微型计算机501通过麦克风505接收到指令后指令水泵323向吸嘴324泵送指定量的饮用水,当水泵323停止工作时,微型计算机501指令扬声器504向患者发出补水完毕的提示,然后患者将吸嘴324重新卡接在夹持座339。
69.(六-四)排泄单元310的工作原理:
s9,患者发出想要排泄的语音指令,微型计算机501通过麦克风505接收到该指令。
70.s10,微型计算机501指令紫外灯336关闭(避免紫外线照射患者的皮肤)、指令负压泵314启动(让便池331这块空间始终处于负压状态,避免污浊的气体或液滴对床垫116造成污染,同时也有助于便池331中的排泄物快速地进入污水腔334中)、指令电控密封开启(让通槽111完全导通);然后微型计算机501指令扬声器504发出可以排泄的语音提示。
71.s11,患者进行排泄,排泄完毕后,患者发出排泄完毕的语音指令。
72.s12,微型计算机501指令电控密封门115关闭,然后指令输送泵313启动,从而通过雾化喷头312对便池331和罩壳332的表面进行冲洗,然后启动紫外灯336对便池331和罩壳332表面进行消毒,然后依次指令输送泵313、负压泵314关闭。
73.(六-五)控制组件500的工作原理:微型计算机501将监测到有关患者的数据实时上传至云端服务器,云端服务器中的人工智能为每一个患者建立独立的模型,从而对患者进行精准的评估并作出相应的预测数据(包括但不限于:患者出现心率异常、血压异常、血氧异常、血栓的概率以及事件发生的时间等等),同时输出相应的护理建议。
74.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1