一种微型机械臂以及溶药机
1.本发明涉及医疗辅助用品技术领域,具体涉及一种微型机械臂以及溶药机。
背景技术:
2.目前,在通过西林瓶配药时,主要采用人工方式,一般先利用针筒从输液袋中抽吸药液,再将针筒的针头插入西林瓶将药液注入西林瓶,人工手持西林瓶对瓶内药液左右摇匀,然后再将针头插入西林瓶内,倒立西林瓶,将西林瓶内药液抽吸出来,抽吸完成的针筒将其内的药液注入输液袋中,拔出针筒,最终完成西林瓶内药剂的转移配药。
3.这种利用手持针筒人工注入和抽吸西林瓶内药剂,然后将针筒插入输液袋并将药液注入输液袋的配药方法,操作繁琐、耗费时间长,尤其在大量的配药场合,反复的重复性工作极易使人疲惫出错,而且手持针筒对西林瓶进行抽吸和对输液袋进行注液的方式,具有一定的危险性,也容易造成对医护人员的伤害。
4.现有技术中也有采用机械方式来代替人工,提高工作效率。如现有技术中cn106737844a、cn207155832u和cn107803829b公开的机械臂结构,其广泛应用于3d打印、堆垛、写字、焊电路板、激光烧结等。如果将上述机械臂直接应用于西林瓶的配药中,还存在无法同时实现给西林瓶开盖、上盖消毒等一些客观问题。
5.因此,如何提供一种微型机械臂和应用此机械臂的溶药机,是本领域技术人员亟待解决的技术问题。
技术实现要素:
6.为此,本发明提供一种微型机械臂以及溶药机,以解决现有技术中由于抽吸西林瓶内药剂操作繁琐而导致容易出现错误和危险的问题。
7.为了实现上述目的,本发明提供如下技术方案:根据本发明的第一方面,本发明公开了一种微型机械臂,包括升降柱、连接滑块、第一关节臂、第二关节臂和夹持装置,所述升降柱与连接滑块传动连接,所述连接滑块与第一关节臂的一端铰接,所述第一关节臂的另一端与第二关节臂的一端铰接,所述第二关节臂的另一端安装有夹持装置,所述连接滑块、第一关节臂与第二关节臂的铰接处均设置有步进电机。
8.进一步的,所述夹持装置包括消毒液罐、回转装置和气动夹爪,所述第二关节臂顶部设置有消毒液罐,所述消毒液罐与气动夹爪连通,所述气动夹爪滑动设置在回转装置上,所述回转装置设置在第二关节臂的底部。
9.进一步的,所述回转装置包括安装座、第一驱动电机、第二驱动电机、第一半圆导轨和第二半圆导轨,所述第二关节臂的底部与安装座顶部螺接固定,所述安装座内正向交叉设置有第一驱动电机和第二驱动电机,所述第一驱动电机与第一半圆导轨通过皮带传动连接,所述第二驱动电机与第二半圆导轨通过皮带传动连接,所述第一半圆导轨和第二半圆导轨正向交叉铰接设置在安装座底部。
10.进一步的,所述气动夹爪包括控制电机、十字节、导向滑块、气缸和夹爪机构,所述安装座中心处固定设置有控制电机,所述控制电机输出轴与十字节的一端相连,所述十字节上固定套设有导向滑块,所述导向滑块同时滑动设置在第一半圆导轨和第二半圆导轨上,所述十字节的另一端与气缸相连,所述气缸与夹爪机构传动连接。
11.进一步的,所述夹爪机构包括喷头、动力滚轮、爪杆、连杆和扫描器,所述气缸的缸筒上对称铰接设置有两个爪杆,任意一个所述爪杆与连杆的一端铰接,所述连杆的另一端与气缸的活塞杆铰接,所述气缸的活塞杆上设置有扫描器,所述爪杆端部设置有喷头,所述喷头与消毒液罐连通,所述爪杆上还设置有由微型电机带动的动力滚轮。
12.进一步的,所述升降柱包括底座、导向条、柱壳和电机丝杠,所述连接滑块套设在电机丝杠上,所述连接滑块与电机丝杠螺纹传动连接,所述电机丝杠竖直设置在柱壳内,所述柱壳内竖直设置有导向条,所述导向条上滑动设置有连接滑块。
13.根据本发明的第二方面,本发明公开了一种溶药机,包括如上所述的一种微型机械臂,还包括排针装置、消毒装置、机壳、储药箱和装药底座,所述储药箱设置在机壳侧面,所述机壳底部安装有装药底座,所述机壳的顶部设置有排针装置和消毒装置,所述微型机械臂设于所述机壳内,且所述微型机械臂靠近所述储药箱。
14.进一步的,所述装药底座包括抽屉、移动托盘、传动丝杠、存药箱、座体和振动盘,所述座体上螺接设置有底座,所述底座正下方设置有抽屉,所述抽屉的侧面设置传动丝杠,所述传动丝杠与移动托盘螺纹传动连接,所述移动托盘上设置有振动盘,所述传动丝杠安装在存药箱的侧面,所述传动丝杠、存药箱和抽屉均设置在座体上。
15.进一步的,所述振动盘包括缓冲弹簧、负压吸盘、振动电机和导轨,所述移动托盘上固定设置有导轨,所述导轨上滑动设置有负压吸盘,所述负压吸盘的一端设置有缓冲弹簧,所述负压吸盘的另一端设置有振动电机。
16.进一步的,所述排针装置包括溶剂盒、驱动气缸和排针,所述机壳内竖直设置有驱动气缸,所述驱动气缸的缸筒上固定设置有溶剂盒,所述驱动气缸的活塞杆与排针相连,所述排针与溶剂盒连通。
17.本发明具有如下优点:本发明通过微型机械臂夹取西林瓶,并可以对药瓶进行识别,从而将其分类汇总,同时,微型机械臂在原有第一关节臂和第二关节臂的基础上加装回转装置和气动夹爪,可以在溶药机狭窄的空间内,满足夹取药瓶并将其正确摆放的要求,从而显著提高了机械手的灵活性,此外结合与微型机械臂配套使用的溶药机,就可以完成西林瓶开盖——消毒——混液——消毒——溶解混合的步骤,由此就可以将原先手持针筒人工注入西林瓶内药剂,然后倒立西林瓶使其溶解的配药方式,完全由自动化的机械设备所代替,由此解决了现有技术中由于注入西林瓶内药剂操作繁琐而导致容易出现错误和危险的问题。
附图说明
18.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据
提供的附图引伸获得其它的实施附图。
19.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
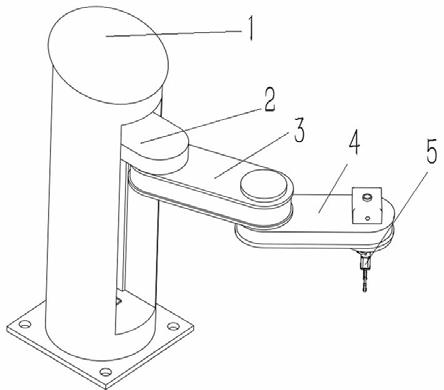
20.图1为本发明提供的一种微型机械臂溶药机的立体图;图2为本发明提供的一种溶药机的立体图;图3为本发明提供的一种溶药机的装药底座立体图;图4为本发明提供的一种微型机械臂的夹爪机构立体图;图5为本发明提供的一种微型机械臂的回转装置立体图;图6为本发明提供的一种微型机械臂的气动夹爪立体图;图7为本发明提供的一种微型机械臂的夹持装置立体图;图8为本发明提供的一种微型机械臂的升降柱立体图;图9为本发明提供的一种溶药机的振动盘立体图;图10为本发明提供的一种溶药机的排针装置立体图;图中:1升降柱;11底座;12导向条;13柱壳;14电机丝杠;2连接滑块;3第一关节臂;4第二关节臂;5夹持装置;51消毒液罐;52回转装置;521安装座;522第一驱动电机;523第二驱动电机;524第一半圆导轨;525第二半圆导轨;53气动夹爪;531控制电机;532十字节;533导向滑块;534气缸;535夹爪机构;5351喷头;5352动力滚轮;5353爪杆;5354连杆;5355扫描器;6排针装置;61溶剂盒;62驱动气缸;63排针;7消毒装置;8机壳;9储药箱;10装药底座;101抽屉;102移动托盘;103传动丝杠;104存药箱;105座体;106振动盘;1061缓冲弹簧;1062负压吸盘;1063振动电机;1064导轨。
具体实施方式
21.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.为了解决现有技术中存在的相关技术问题,本技术提供了一种微型机械臂以及溶药机,用于实现西林瓶粉末药剂的溶解,使得重复性配药工作由自动化机械手和机器来代替,不仅能够大大提高护士的工作效率,而且还能够降低出错率。具体的,本技术提供了如下的实施例。
23.实施例1本发明实施例1公开了一种微型机械臂,包括升降柱1、连接滑块2、第一关节臂3、第二关节臂4和夹持装置5,升降柱1与连接滑块2传动连接,连接滑块2可以沿升降柱1上下移动,同时由于连接滑块2与第一关节臂3的一端铰接,第一关节臂3的另一端与第二关节臂4的一端铰接,第一关节臂3和第二关节臂4位于同一水平高度,因此来带动第一关节臂3和第二关节臂4实现同步运动。第二关节臂4的另一端安装有夹持装置5,夹持装置5用来夹取西林瓶,并调节夹取西林瓶的位置角度,从而将西林瓶正确摆放在溶药机内。连接滑块2、第
一关节臂3与第二关节臂4的铰接处均设置有步进电机,步进电机受到以单片机或可编程逻辑控制器为主的控制系统的控制,从而在溶药机有限的空间内,完成指定夹取动作。
24.根据本发明公开的一个具体实施例,夹持装置5包括消毒液罐51、回转装置52和气动夹爪53,第二关节臂4顶部设置有消毒液罐51,消毒液罐51内装有消毒液,消毒液罐51与气动夹爪53连通,由此当气动夹爪53初次夹持西林瓶进入移动托盘102后,气动夹爪53改变位置从竖直方向取下瓶盖,然后就可以将消毒液释放到瓶口上,进行初次消毒,以防细菌病毒侵入药品。气动夹爪53滑动设置在回转装置52上,回转装置52设置在第二关节臂4的底部,回转装置52可以使得气动夹爪53在半球面的空间内自由改变夹取的位置,由此来方便夹取西林瓶。
25.根据本发明公开的一个具体实施例,回转装置52包括安装座521、第一驱动电机522、第二驱动电机523、第一半圆导轨524和第二半圆导轨525,第二关节臂4的底部与安装座521顶部螺接固定,如图6,安装座521内正向交叉设置有第一驱动电机522和第二驱动电机523,第一驱动电机522和第二驱动电机523均为可通过单片机控制的同步电机,可随意调节转角。第一驱动电机522与第一半圆导轨524通过皮带传动连接,第二驱动电机523与第二半圆导轨525通过皮带传动连接,第一半圆导轨524和第二半圆导轨525正向交叉铰接设置在安装座521底部,由此通过第一驱动电机522和第二驱动电机523就改变第一半圆导轨524和第二半圆导轨525偏摆角度,更进一步的,由于气动夹爪53同时滑动设置在第一半圆导轨524和第二半圆导轨525的交叉位置上,因此,实际上,气动夹爪53就可以移动到第一半圆导轨524和第二半圆导轨525所在的半圆球面的任意位置。此外,本实施例也可以采用链传动或齿轮传动等其他的传动方式,并以此来实现类似的技术效果。
26.根据本发明公开的一个具体实施例,气动夹爪53包括控制电机531、十字节532、导向滑块533、气缸534和夹爪机构535,安装座521中心处固定设置有控制电机531,控制电机531也采用可以控的同步电机,用来带动夹爪机构535实现自转。控制电机531输出轴与十字节532的一端相连,十字节532上固定套设有导向滑块533,十字节532实现变角度动力传递的机件,用于需要改变传动轴线方向的位置。导向滑块533同时滑动设置在第一半圆导轨524和第二半圆导轨525上,十字节532的另一端与气缸534相连,气缸534与夹爪机构535传动连接,在本实施例中,通过设置十字节532,就可以在夹爪机构535移动位置的同时,实现夹爪机构535的自转,由此可以显著提高夹持装置5的运行效率,缩短夹取摆放西林瓶的时间。
27.根据本发明公开的一个具体实施例,夹爪机构535包括喷头5351、动力滚轮5352、爪杆5353、连杆5354和扫描器5355,气缸534的缸筒上对称铰接设置有两个爪杆5353,任意一个爪杆5353与连杆5354的一端铰接,连杆5354的另一端与气缸534的活塞杆铰接,气缸534的活塞杆在缸筒内做活塞运动,由此通过连杆5354就可以带动对称设置的两个爪杆5353做开合运动,从内夹取西林瓶。气缸534的活塞杆上设置有扫描器5355,西林瓶的瓶壁上贴设有条形码或二维码,用来标示西林瓶内药品的信息。爪杆5353上还设置有由微型电机带动的动力滚轮5352。动力滚轮5352在爪杆5353抓取西林瓶的过程中带动西林瓶滚动,同时,通过扫描器5355扫描条形码,由此来识别条形码信息,并通过读取的信息,对不同类型的西林瓶药品分类摆放,由此起到省略人工识别,提高分类效率的效果。爪杆5353端部设置有喷头5351,喷头5351与消毒液罐51连通,通过小型电泵输出消毒液,由此在爪杆5353夹
持西林瓶瓶盖后,喷头5351就能够对西林瓶的瓶口处喷洒消毒液,从而对西林瓶进行初步消毒,继而避免在打开西林瓶后,细菌病毒污染瓶中药品。
28.需要说明的是,为了图中简洁,并未在图中示出喷头5351和消毒液罐51之间的管道、控制阀、注射泵等结构,但为了实现上述功能,本领域技术人员能够知道其具有相应的结构和功能,因此,专利文件中不再赘述。
29.根据本发明公开的一个具体实施例,升降柱1包括底座11、导向条12、柱壳13和电机丝杠14,连接滑块2套设在电机丝杠14上,连接滑块2与电机丝杠14螺纹传动连接,电机丝杠14竖直设置在柱壳13内,柱壳13内竖直设置有导向条12,导向条12上滑动设置有连接滑块2。当电机丝杠14转动时,连接滑块2就可以沿导向条12的方向移动,由此实现连接滑块2上下移动的技术效果。
30.本发明实施例1的使用过程如下:首先,将所有西林瓶放入到溶药机内,第一关节臂3和第二关节臂4带动气动夹爪53移动到西林瓶位置进行抓取,然后连接滑块2抬升,同时动力滚轮5352带动西林瓶滚动,在瓶身滚动的同时,扫描器5355读取西林瓶条形码的信息,从而对其进行分类,同类的西林瓶在负压吸盘1062的位置上摆放到一起,负压吸盘1062由气泵抽气,从而将西林瓶瓶身固定住,每一个西林瓶固定住之后,夹爪机构535都会顺势改变姿态,通过回转装置52从竖直方向取下瓶盖,同时,喷头5351喷出消毒液,进行消毒,防止有害细菌病毒侵入药品。
31.实施例2本发明实施例2提供了一种溶药机,包括如上提出的一种微型机械臂,还包括排针装置6、消毒装置7、机壳8、储药箱9和装药底座10,储药箱9设置在机壳8侧面,储药箱9斜向设置有滑道,若干不同类型的西林瓶储存在滑道中,以供夹爪机构535夹取。机壳8底部安装有装药底座10,装药底座10可用于储存瓶盖,并带动摆放好的西林瓶移动,从而通过排针装置6向瓶中注入溶剂。机壳8的顶部设置有排针装置6和消毒装置7,消毒装置7会在西林瓶瓶盖打开后进一步进行消毒。
32.需要说明的是,本技术实施例中的消毒装置7采用喷淋式消毒方式,可在西林瓶注射溶剂后进行喷淋消毒,消毒液可采用酒精或其他消毒液。消毒装置7受到控制器或单片机的控制,根据实际需要适时开启。
33.根据本发明公开的一个具体实施例,装药底座10包括抽屉101、移动托盘102、传动丝杠103、存药箱104、座体105、振动盘106,座体105上螺接设置有底座11,底座11正下方设置有抽屉101,当气动夹爪53取下瓶盖后,会直接将其投入到抽屉101中,以便回收废物。抽屉101的侧面设置传动丝杠103,传动丝杠103与移动托盘102螺纹传动连接,当传动丝杠103转动时,移动托盘102即可向外移动,由于西林瓶已经通过微型机械臂分类摆放好,因此当移动托盘102移动到指定位置时,通过排针63即可向移动托盘102中的西林瓶注入不同的溶剂,由此提高工作效率。并且移动托盘102上设置有振动盘106,通过振动盘106可以加快药物与溶剂之间的溶解混合。传动丝杠103设置有存药箱104,传动丝杠103、存药箱104和抽屉101均设置在座体105上。其中存药箱104用来存放已经处理好的西林瓶药品。
34.根据本发明公开的一个具体实施例,振动盘106包括缓冲弹簧1061、负压吸盘1062、振动电机1063和导轨1064,移动托盘102上固定设置有导轨1064,导轨1064上滑动设置有负压吸盘1062,负压吸盘1062的一端设置有缓冲弹簧1061,负压吸盘1062的另一端设
置有振动电机1063。负压吸盘1062上设置有位置固定的凹槽,西林瓶通过微型机械臂将西林瓶放入到凹槽内,负压吸盘1062与气泵(图中未示出)连通,通过抽取负压吸盘1062空气形成吸力从而固定西林瓶,当振动电机1063启动时,负压吸盘1062高速晃动,由此就可以加快药品的溶解。
35.根据本发明公开的一个具体实施例,排针装置6包括溶剂盒61、驱动气缸62和排针63,机壳8内竖直设置有驱动气缸62,驱动气缸62的缸筒上固定设置有溶剂盒61,溶剂盒61内存有不同的溶剂,由于西林瓶已经摆放好,而且驱动气缸62的活塞杆与排针63相连,通过驱动气缸62带动排针63上下移动,排针63与溶剂盒61连通,由此就可以将对应的溶剂一次注入到西林瓶中,从而完成药物的溶解混合。同时,现有技术中可知,西林瓶内为负压或微负压状态,排针63向下插入到西林瓶中,溶剂在重力作用和负压作用下进入到西林瓶中。当然,更进一步的,还是可以在排针装置6上设置蠕动泵或注射泵,在受到单片机或控制器的控制实现开启注液。注射泵等的工作原理属于现有技术,在此不再赘述。
36.本发明实施例2的使用过程如下:本发明实施例2提供了一种溶药机,其具体使用时,首先,将若干不同类型的西林瓶放入储药箱9内,然后通过微型机械臂把西林瓶逐个放入到移动托盘102内,同时通过对西林瓶进行分类汇总,在西林瓶摆放完毕后,此时西林瓶瓶口处已经经过初步的消毒,在此基础上,当移动托盘102移动到排针63处的位置时,将不同的溶剂注入到西林瓶中,并利用消毒装置7向西林瓶喷洒消毒液,进行二次消毒,防止细菌病毒随排针进入药品中,最后并通过振动电机1063进行振荡,加快药物溶解混合,最后当西林瓶完全溶解混合之后,直接使用或装入存药箱104即可。
37.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1