一种生产机器人微创手术用穿刺导向器的设计方法与流程
1.本发明涉及医疗临床技术领域,具体为一种生产机器人微创手术用穿刺导向器的设计方法。
背景技术:
2.在肿瘤或脊椎微创治疗等微创手术中,通常通过经皮穿刺的方法使治疗器械直达病灶进行针对性治疗,例如穿刺针、冷冻针、射频针、椎钉针等,在临床实际操作中,医生一般通过徒手穿刺或3d打印模板辅助下穿刺;现有穿刺方式局限性非常大,徒手穿刺精准度低,风险高,完全依赖医生经验和技术,当病人病情发生较大变化或在肺部等运动较大的部位时,不适合使用3d打印模板。
3.目前市面上机器人多为通用型机器人,为了使其具备在临床进行微创手术的功能,需要结合导向器进行微创治疗,而现有的导向器在进行穿刺针定位时却较为繁琐,且难以适用与不同直径的穿刺针定位作业,降低了设备的便捷性以及适用范围。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种生产机器人微创手术用穿刺导向器的设计方法,解决了便捷性、适用范围降低的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种生产机器人微创手术用穿刺导向器的设计方法,具体包括以下步骤:
6.s1、首先将设计的连接器以及夹具通过连接螺栓进行组装,而后将夹具通过连接器装配至机器人末端;
7.s2、将微创手术时所用的激光测距仪以及穿刺针分别安装至夹具内部后进行固定,使得激光测距仪以及穿刺针通过夹具、连接器的配合连接至机器人,既可通过机器人进行微创手术;
8.其中,s1中所述连接器包含有支撑柱和底盘,s1中所述夹具包含有支撑臂以及限位架,所述支撑柱的端部开设有若干个限位孔,所述支撑臂的一端为套管型、且内部固定安装有若干个限位柱,所述支撑臂的套管端套接在支撑柱的端部、且通过若干个所述限位柱和连接螺栓的配合固定连接,所述限位架固定安装在支撑臂的端部,所述限位架的内部开设有激光器放置槽、且激光器放置槽的内部设置有定位组件,所述限位架的侧面设置有夹持组件,所述限位架的底部设置有限位组件,所述夹持组件包含有滑块,所述滑块的内部开设有限位槽,所述滑块的内部两侧均对称开设有矩形槽,所述限位架的侧面两端均固定安装有矩形滑块,所述滑块分别通过矩形槽与矩形滑块的配合滑动安装在限位架的侧面,所述滑块的端部开设有弧形槽、且弧形槽的内部设置有弧形板,所述弧形槽的内部中心位置固定安装有限位轴套,所述限位轴套的内部转动安装有限位杆,所述弧形板的外侧两端均固定安装有外轴套、且两个所述外轴套分别固定套接在限位杆的两端,所述限位杆的外侧两端均固定套接有弹簧体、两个所述弹簧体分别位于限位轴套的内侧两端,所述限位架的
侧面端部固定安装有矩形块,所述矩形块的内部开设有与圆形孔、且圆形孔的内部固定安装有衔接柱,所述衔接柱的端部固定安装有弹性拉绳,所述弹性拉绳的另一端固定连接至滑块的侧面中部,所述限位架的内部开设有螺纹孔,所述螺纹孔的内部设置有与其相互啮合的固定螺栓、且固定螺栓的端部穿过限位槽内部,所述限位架的侧面开设有导引孔,所述弧形板的安装位置与导引孔的开设位置相互对应。
9.优选的,所述弧形板分别通过外侧固定安装的外轴套、以及限位轴套与限位杆之间的配合转动安装在弧形槽的内部。
10.优选的,所述定位组件包含有定位板,所述定位板的两侧均固定安装有限位块,所述激光器放置槽的内壁两侧均对称开设有限位滑槽,所述定位板分别通过两侧的限位块与限位滑槽之间的配合滑动安装在激光器放置槽内部,所述定位板的侧面中部转动安装有定位螺栓,所述定位螺栓的另一端穿过限位架、且与限位架之间通过螺纹相互啮合。
11.优选的,所述底盘的内部开设有若干个螺丝定位孔,所述底盘的顶面一侧固定安装有定位柱。
12.优选的,所述弧形板的长度与限位架以及滑块的高度均相同,所述弧形板的内侧固定安装有若干个防滑凸片。
13.优选的,所述滑块通过对应的矩形槽与矩形滑块的配合始终与限位架保持平行,所述滑块的端部与矩形块之间留设有距离。
14.优选的,所述激光器放置槽为贯穿开设在限位架的内部中心位置。
15.优选的,所述限位组件包含有限位环,所述限位环固定安装在限位架的底部、且位于导引孔的底部,所述限位环内部两侧均固定安装有外套管以及螺纹轴套,所述外套管的内部两端均滑动安装有滑杆以及推杆、且滑杆与推杆之间通过弹性筋连接,所述推杆的另一端设置有固定栓、且通过固定栓固定连接至滑块的底部,所述螺纹轴套的内部通过螺纹衔接设置有螺纹杆,所述螺纹杆的端部以及滑杆的端部均转动安装有定位块,所述螺纹杆的另一端固定套接有翼型螺母。
16.优选的,两个所述定位块分别通过螺纹杆以及滑杆的配合转动设置在限位环内部,两个所述定位块的外侧均开设有凹型槽、且分别通过凹型槽的配合转动设置在螺纹杆和滑杆的端部。
17.有益效果
18.本发明提供了一种生产机器人微创手术用穿刺导向器的设计方法。与现有技术相比具备以下有益效果:
19.(1)、该生产机器人微创手术用穿刺导向器的设计方法,通过夹持组件的以及限位组件的设置,当对穿刺针进行装配的过程中,通过松动固定螺栓后向侧面拉动滑块,而后将穿刺针插入导引孔内部,插入完成后通过弹性拉绳拉动滑块以及弧形板对穿刺针进行定位,能够避免穿刺针出现脱落的同时便于后续进行位置调节、定位等作业,通过弧形板以及滑板对穿刺针进行固定后,通过转动固定螺栓,使其保证滑块与限位架之间的固定,从而保证了穿刺针的稳定性,避免在手术的过程中穿刺针在导引孔内部晃动而影响穿刺精度,提升了穿刺针的装配便捷性以及稳定性。
20.(2)、该生产机器人微创手术用穿刺导向器的设计方法,通过弧形板以及弧形板侧面设置的限位轴套、限位杆等组件的配合,当插入的穿刺针定位环处直径略小时,弧形板通
过弹性拉绳以及滑块复位的过程中会首先通过一侧与穿刺针接触,而后通过滑块的推动使其沿限位杆转动,通过内部的弧面以及若干个防滑凸片实现穿刺针的定位,从而能够使装置适用与对不同直径的穿刺针进行定位作业,提升了装置的适用范围。
21.(3)、该生产机器人微创手术用穿刺导向器的设计方法,通过定位组件的设置,当在对激光测距仪进行定位时,通过转动定位螺栓以及定位螺栓与限位架之间的啮合,能够向内侧推动定位板,使定位板能够通过两侧的限位块在激光器放置槽内部滑动,对放入的激光测距仪进行定位,直至通过定位板将激光测距仪夹持即可,使得激光测距仪保证稳定性的同时装配更加便捷。
附图说明
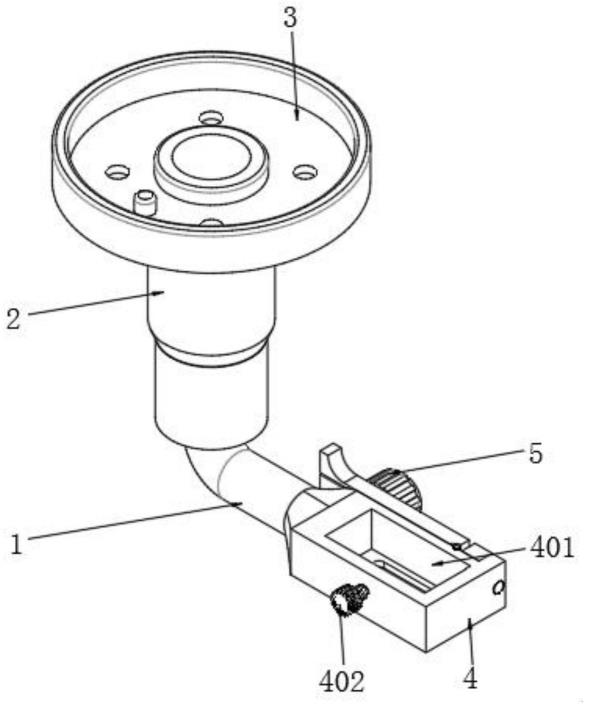
22.图1为本发明整体结构示意图;
23.图2为本发明夹具剖视结构示意图;
24.图3为本发明a点剖视结构示意图;
25.图4为本发明矩形块剖视结构示意图;
26.图5为本发明弧形板结构示意图;
27.图6为本发明b点放大结构示意图;
28.图7为本发明整体侧视爆炸结构示意图;
29.图8为本发明c点放大结构示意图;
30.图9为本发明限位环剖视结构示意图;
31.图10为本发明d点放大结构示意图;。
32.图中:1、支撑臂;101、限位柱;2、支撑柱;3、底盘;301、螺丝定位孔;302、定位柱;4、限位架;401、激光器放置槽;4011、限位滑槽;402、定位螺栓;403、定位板;4031、限位块;404、矩形滑块;405、螺纹孔;5、固定螺栓;6、滑块;601、弧形槽;602、矩形槽;603、限位槽;7、导引孔;8、矩形块;801、圆形孔;802、衔接柱;803、弹性拉绳;9、弧形板;901、外轴套;902、防滑凸片;10、限位杆;1001、弹簧体;11、限位轴套;12、限位环;13、外套管;1301、滑杆;1302、推杆;1303、固定栓;14、定位块;1401、凹型槽;15、螺纹轴套;1501、螺纹杆;1502、翼型螺母。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.请参阅图1-10,本发明提供一种技术方案:一种生产机器人微创手术用穿刺导向器的设计方法,具体包括以下步骤:
35.s1、首先将设计的连接器以及夹具通过连接螺栓进行组装,而后将夹具通过连接器装配至机器人末端;
36.s2、将微创手术时所用的激光测距仪以及穿刺针分别安装至夹具内部后进行固定,使得激光测距仪以及穿刺针通过夹具、连接器的配合连接至机器人,既可通过机器人进行微创手术;
37.其中,s1中连接器包含有支撑柱2和底盘3,s1中夹具包含有支撑臂1以及限位架4,支撑柱2的端部开设有若干个限位孔,支撑臂1的一端为套管型、且内部固定安装有若干个限位柱101,支撑臂1的套管端套接在支撑柱2的端部、且通过若干个限位柱101和连接螺栓的配合固定连接,限位架4固定安装在支撑臂1的端部,限位架4的内部开设有激光器放置槽401、且激光器放置槽401的内部设置有定位组件,限位架4的侧面设置有夹持组件,所述限位架4的底部设置有限位组件,夹持组件包含有滑块6,滑块6的内部开设有限位槽603,滑块6的内部两侧均对称开设有矩形槽602,限位架4的侧面两端均固定安装有矩形滑块404,滑块6分别通过矩形槽602与矩形滑块404的配合滑动安装在限位架4的侧面,滑块6的端部开设有弧形槽601、且弧形槽601的内部设置有弧形板9,弧形槽601的内部中心位置固定安装有限位轴套11,限位轴套11的内部转动安装有限位杆10,弧形板9的外侧两端均固定安装有外轴套901、且两个外轴套901分别固定套接在限位杆10的两端,限位杆10的外侧两端均固定套接有弹簧体1001、两个弹簧体1001分别位于限位轴套11的内侧两端,限位架4的侧面端部固定安装有矩形块8,矩形块8的内部开设有与圆形孔801、且圆形孔801的内部固定安装有衔接柱802,衔接柱802的端部固定安装有弹性拉绳803,弹性拉绳803的另一端固定连接至滑块6的侧面中部,限位架4的内部开设有螺纹孔405,螺纹孔405的内部设置有与其相互啮合的固定螺栓5、且固定螺栓5的端部穿过限位槽603内部,限位架4的侧面开设有导引孔7,弧形板9的安装位置与导引孔7的开设位置相互对应,弧形板9分别通过外侧固定安装的外轴套901、以及限位轴套11与限位杆10之间的配合转动安装在弧形槽601的内部,定位组件包含有定位板403,定位板403的两侧均固定安装有限位块4031,激光器放置槽401的内壁两侧均对称开设有限位滑槽4011,定位板403分别通过两侧的限位块4031与限位滑槽4011之间的配合滑动安装在激光器放置槽401内部,定位板403的侧面中部转动安装有定位螺栓402,定位螺栓402的另一端穿过限位架4、且与限位架4之间通过螺纹相互啮合,底盘3的内部开设有若干个螺丝定位孔301,底盘3的顶面一侧固定安装有定位柱302,弧形板9的长度与限位架4以及滑块6的高度均相同,弧形板9的内侧固定安装有若干个防滑凸片902,滑块6通过对应的矩形槽602与矩形滑块404的配合始终与限位架4保持平行,滑块6的端部与矩形块8之间留设有距离,激光器放置槽401为贯穿开设在限位架4的内部中心位置,弧形板9的内壁弧度与导引孔7的内壁弧度相同,当穿刺针的直径与其相同时,能够通过弧形板9以及导引孔7与其贴合实现固定夹持,当直径略小时,弧形板9通过沿限位杆10转动能够向导引孔7内部略微压入,直至其内壁与穿刺针贴合完成定位,导引孔7的内壁弧度超过180
°
,穿刺针以及激光测距仪均为现有的微创手术所用组件,限位组件包含有限位环12,限位环12固定安装在限位架4的底部、且位于导引孔7的底部,限位环12内部两侧均固定安装有外套管13以及螺纹轴套15,外套管13的内部两端均滑动安装有滑杆1301以及推杆1302、且滑杆1301与推杆1302之间通过弹性筋连接,推杆1302的另一端设置有固定栓1303、且通过固定栓1303固定连接至滑块6的底部,螺纹轴套15的内部通过螺纹衔接设置有螺纹杆1501,螺纹杆1501的端部以及滑杆1301的端部均转动安装有定位块14,螺纹杆1501的另一端固定套接有翼型螺母1502,两个定位块14分别通过螺纹杆1501以及滑杆1301的配合转动设置在限位环12内部,两个定位块14的外侧均开设有凹型槽1401、且分别通过凹型槽1401的配合转动设置在螺纹杆1501和滑杆1301的端部,两个定位块14的转动范围均为0
°‑
30
°
,使其适用与对直径略小的穿刺针进行固定时能够进行转动将穿刺针进行夹持。
38.使用时,首先将支撑臂1与底盘3进行组装,通过支撑臂1端部设置的若干个限位柱101、以及底盘3底部安装的支撑柱2和若干个限位孔的配合,将支撑臂1、支撑柱2以及底盘3之间通过连接螺栓组装为一体,而后将将底盘3端部设置的定位柱302插入机器人末端,而后通过螺丝定位孔301将其与机器人末端固定,即可完成导向器的装配,装配完成后将手术所需的激光测距仪放入限位架4内部开设的激光器放置槽401内部,而后转动定位螺栓402,通过定位螺栓402的转动以及定位螺栓402与限位架4之间的啮合,能够向内侧推动定位板403,使定位板403能够通过两侧的限位块4031在激光器放置槽401内部滑动,对放入的激光测距仪进行定位,直至通过定位板403将激光测距仪夹持即可,穿刺针安装的过程中,首先松动固定螺栓5,使得滑块6能够通过内侧的矩形槽602与矩形滑块404的配合进行滑动,而后通过向外侧拉动滑块6后将穿刺针插入导引孔7内部,拉动滑块6的同时他弹性拉绳803能够通过滑块6的移动被拉伸,当穿刺针插入导引孔7内部后松开滑块6,其能够通过弹性拉绳803进行复位,使其端部设置的弧形板9与插入的穿刺针外侧贴合进行定位,当插入的穿刺针定位环处直径略小时,能够使得复位的弧形板9一侧首先与穿刺针接触,而后通过滑块6带动弧形板9持续移动,使得弧形板9通过与穿刺针的贴合以及滑块6的推动、沿限位杆10进行转动,直至弧形板9转动至合适的角度将穿刺针进行固定,使其能够适用与直径不同的穿刺针定位作业,定位完成后通过转动固定螺栓5使得滑块6与限位架4之间固定,从而保证穿刺针的装配稳定性,避免在手术的过程中穿刺针在导引孔7内部晃动而影响穿刺精度,同时提升了穿刺针的装配便捷性以及适用范围,通过限位组件的设置,当滑块6滑动时,能够同时通过固定栓1303的配合带动推杆1302移动,当穿刺针放置后通过滑板6滑动对其夹持时能够同时通过推杆1302的配合向前推动滑杆1301,而后通过滑杆1301端部转动安装的定位块14对穿刺针一侧进行固定,当滑块6固定后,通过翼型螺母1502转动能够使螺纹杆1501通过螺纹轴套15向前推动,通过对应的定位块14将穿刺针进行固定。
39.同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
40.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1