一种骨水泥远程注入系统及其注入方法与流程
1.本发明涉及医疗设备技术领域,具体涉及一种骨水泥远程注入系统及其远程注入方法。
背景技术:
2.在医疗技术领域,骨水泥是性能优异、用途广泛的水溶性高分子化合物,属高科技、高附加值精细化工产品。骨水泥在医药上有广泛的应用,可用作胶囊的助流剂,注射剂的助溶剂,液体制剂的分散剂,酶及热敏药物的稳定剂。同时,骨水泥还是一种广泛用于骨科手术的医用材料,主要用于人工关节置换手术和椎体成形手术中的骨质填充。目前,在各大医院骨科手术中,常使用骨水泥注入器进行骨水泥的注入和填充。骨水泥开始像砂浆,可以揉捏、挤压成任意形状,然后逐步固化,医生在其固化前,将它置于准备更换关节的部位或者注入椎体中,等到反应结束,骨水泥完全固化,即可完成人工关节与人体骨骼镶嵌与固定。
3.医生在实际手术过程中,采用常规的骨水泥注入器进行填充存在以下问题:首先,骨科手术过程中,医生一边考虑骨水泥注入量和注入通道,一边手持骨水泥注入器向病患骨腔内缓慢注入骨水泥,操作过程繁琐,注入量不可控,注入量不够稳定会给手术带来极大的风险;另外,例如像椎体成形手术中,注入量和注入位置需要借助c臂x光透视才能看到,为避免人体长期暴露在x光辐射环境下,医生会选择在需要拍x光片时离开手术室,或选择手术全程穿着沉重的防护服,无论何种方式,都增加了医生不必要的工作负担,也降低了骨水泥注入的效率,延长手术时间,增加患者疼痛。有鉴于上述问题,特提出本发明。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的在于提供一种骨水泥远程注入系统及其远程注入方法,用以解决或部分解决上述问题。
5.本发明的第一方面,提出一种骨水泥远程注入系统,包括驱动装置、传动线结构、从动装置和注入装置;具体的,驱动装置内设置有主动轮结构;从动装置内设置有从动轮结构;主动轮结构通过传动线结构与从动轮结构连接在一起;
6.注入装置包括注射器、注射活塞和注射头;注射器一端通过连接管结构连接注射头,另一端通过丝杆结构连接注射活塞;丝杆结构通过装配结构可拆卸的与从动装置连接;
7.主动轮结构转动,拉动传动线结构带动从动轮结构转动,从而带动丝杆结构推动注射活塞注射骨水泥。
8.可选的,驱动装置包括驱动轴,主动轮结构套设在驱动轴上;主动轮结构包括主动轮、驱动弹簧和旋转部,转动旋转部带动主动轮转动并旋紧驱动弹簧,主动轮结构拉动传动线结构。
9.进一步的,驱动装置还包括金属爪盘结构,具体的,包含两个互相啮合的部分,该两个互相啮合的部分分别连接在主动轮和驱动轴上;当需要固定旋紧驱动弹簧时,首先推
入旋转部使金属爪盘结构啮合,之后转动旋转部使驱动弹簧旋紧。
10.相对应的,反方向抽拉旋转部使金属爪盘结构分离,主动轮在驱动弹簧作用下归位。
11.可选的,从动装置包括从动轴,从动轮结构套设在从动轴上;当传动线结构被主动轮结构拉动时,其另一端同时拉动从动轮结构转动。
12.进一步的,从动轮结构包括从动轮、从动弹簧和单向轴承;从动轮在传动线结构拉动作用下转动,旋紧从动弹簧;在单向轴承作用下,从动轴与从动轮转动方向相反,推动丝杆结构向注射头一侧移动。
13.可选的,从动轮周向上还设置有限位片,单向轴承设置在限位片内。通过限位片的限位作用,使得单向轴承的可转动角度被限制在一定角度范围内。
14.进一步的,本发明的骨水泥远程注入系统还包括搅拌装置,该搅拌装置可拆卸的与骨水泥远程注入系统的注射器连接,固态骨水泥事先在搅拌装置内进行溶解混合搅拌,形成骨水泥液后,充灌入注入装置内。
15.本发明的第二方面,还提出一种骨水泥远程注入方法,使用上述第一方面所描述的骨水泥远程注入系统,完成远距离骨水泥注入操作。具体的,骨水泥远程注入方法包含如下操作步骤:
16.第一,搅拌装置使用可与注射器连接的搅拌管,骨水泥预先在注射器与搅拌管连接后的腔体内进行溶解混合;
17.第二,搅拌完成后形成的骨水泥液保存在注射器内,注射器注射端依次安装连接管结构和注射头;
18.第三、填充有骨水泥液的注入装置通过丝杆结构、装配结构连接至从动装置;
19.第四,使用骨水泥远程注入系统定量将注射器内的骨水泥液注入目标内。
20.进一步的,上述第四步骤的注入过程还包括如下步骤:
21.从动轮每次转动一定角度,完成一定量的骨水泥液注入;完成每次骨水泥液注入后,从动轮归位,进行下一次注入。
22.通过使用本发明的骨水泥远程注入系统及注入方法,可在较远的距离进行骨水泥注入操作,具有如下有益效果:
23.(1)医生可以手持远端的驱动装置,在距离患者较远的地方进行注入操作,无需穿着厚重的防护服,避免长期暴露在x光照射环境下,有益身体健康。
24.(2)通过从动装置内的限位结构,可实现每次定量的注入骨水泥,通过定量多次注入,更高效率的完成例如椎体成形手术。
25.(3)本发明的骨水泥远程注入系统还可连接骨水泥搅拌装置,骨水泥搅拌完成后即可开始注入,简化操作过程,缩短操作时间,提高骨水泥注入效率。
附图说明
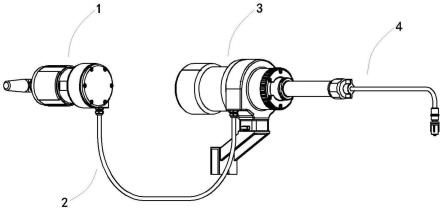
26.图1为本发明优选实施例的骨水泥远程注入系统结构示意图;
27.图2为本发明优选实施例中传动线结构的示意图;
28.图3为本发明优选实施例中驱动装置的结构示意图;
29.图4为本发明优选实施例中从动装置的结构示意图;
30.图5为本发明优选实施例中注射装置的结构示意图;
31.图6为本发明实施例使用的优选的搅拌装置与注射装置装配连接示意图;
32.图7为本发明实施例使用优选的搅拌装置进行骨水泥搅拌时的结构示意图。
33.其中,
34.1-驱动装置;
35.10-驱动轴;11-主动轮结构;111-主动轮;112-驱动弹簧;113-旋转部;12-金属爪盘结构;13-驱动单向轴承;
36.2-传动线结构;
37.21-线芯;22-线套;
38.3-从动装置;
39.30-从动轴;31-从动轮结构;311-从动轮;312-从动弹簧;313-单向轴承;314-辅助单向轴承;32-装配结构;
40.4-注入装置;
41.41-注射器;42-注射活塞;43-注射头;44-连接管结构;441-连接管; 442-连接接头;45-丝杆结构;
42.5-搅拌装置;
43.51-搅拌管;52-搅拌球;53-密封盖。
具体实施方式
44.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.本发明提出一种骨水泥远程注入系统,包括驱动装置1、传动线结构2、从动装置3和注入装置4组成;通过传动线结构2将驱动装置1与从动装置3联动,从而使从动装置3带动注入装置4内的丝杆结构45、注射活塞 42运动,推进注射器41内的骨水泥注入目标。
46.参考图1-5,为本发明的优选实施例提出的一种骨水泥远程注入系统,包括驱动装置1、传动线结构2、从动装置3和注入装置4;具体的,驱动装置1内设置有主动轮结构11;从动装置3内设置有从动轮结构31;主动轮结构11通过传动线结构2与从动轮结构31连接在一起;
47.注入装置4包括注射器41、注射活塞42和注射头43;注射器41一端通过连接管结构44连接注射头43,另一端通过丝杆结构45连接注射活塞 42;丝杆结构45通过装配结构32可拆卸的与从动装置3连接;
48.主动轮结构11转动,拉动传动线结构2带动从动轮结构31转动,从而带动丝杆结构45推动注射活塞42注射骨水泥。
49.优选的,参考图3,驱动装置1包括驱动轴10,主动轮结构11套设在驱动轴10上;主动轮结构11包括主动轮111、驱动弹簧112和旋转部113,转动旋转部113带动主动轮111转动并旋紧驱动弹簧112,主动轮结构11 拉动传动线结构2。
50.进一步的,驱动装置1还包括金属爪盘结构12,具体的,包含两个互相啮合的部分,
该两个互相啮合的部分分别连接在主动轮111和驱动轴10 上;当需要固定旋紧驱动弹簧112时,首先推入旋转部113使金属爪盘结构12相互啮合,之后转动旋转部113使驱动弹簧112旋紧;
51.相对应的,反方向抽拉旋转部113可使金属爪盘结构12分离,主动轮 111在驱动弹簧112作用下归位。
52.优选的,参考图4,从动装置3包括从动轴30,从动轮结,31套设在从动轴30上;当传动线结构2被主动轮结构11拉动时,其另一端同时拉动从动轮结构31转动。
53.进一步的,从动轮结构31包括从动轮311、从动弹簧312和单向轴承 313、辅助单向轴承314;从动轮311在传动线结构2拉动作用下转动,旋紧从动弹簧312;在单向轴承313作用下,从动轴30与从动轮311转动方向相反,推动丝杆结构32向注射头43一侧移动。
54.优选的,从动轮周向上还设置有限位片,单向轴承313设置在限位片内,使得从动轮结构31的旋转只能限定在限位片之间的一定角度,保证每次旋转相同角度,即推动注射活塞移动相同位移,从而完成每次同一量值的骨水泥注入。
55.优选的,参考图2,传动线结构2包括一根线芯21,该线芯21一端连接至驱动装置1的主动轮111上,另一端连接至从动装置3的从动轮311 上。为了定位及保护该线芯21,在其外侧还套设有线套22,线套22的两端分别固定在驱动装置1、从动装置3的外壳上。
56.进一步的,本发明的骨水泥远程注入系统还包括搅拌装置5,固态骨水泥事先在搅拌装置5内进行溶解混合搅拌,形成骨水泥液后,充灌入注入装置4内。
57.优选的,参考图6、图7,为一种可与注入装置4连接的搅拌装置5,主要包括搅拌管51、搅拌球52和密封盖53。具体的:
58.搅拌管51一端连接至注射器41远离从动装置3的一端;固态的骨水泥粉装入注射器41和搅拌管51连通后的腔体内,通过搅拌球52搅拌形成可注入的液态骨水泥。
59.进一步的,密封盖53内可嵌入磁吸部件,当骨水泥搅拌完成后,通过磁吸部件将搅拌球52吸出。之后,拆掉搅拌装置5,迅速将连接管结构紧固装配在注入装置4的注射端端头,完成骨水泥充灌。
60.本发明在上述优选实施例的基础上,还提出一种骨水泥远程注入方法,使用上述实施例描述的骨水泥远程注入系统,完成远距离骨水泥注入操作。具体的,骨水泥远程注入方法包含如下操作步骤:
61.第一,搅拌装置使用可与注射器连接的搅拌管,骨水泥预先在注射器与搅拌管连接后的腔体内进行溶解混合;
62.第二,搅拌完成后形成的骨水泥液保存在注射器内,注射器注射端依次安装连接管结构和注射头;
63.第三、填充有骨水泥液的注入装置通过丝杆结构、装配结构连接至从动装置;
64.第四,使用骨水泥远程注入系统定量将注射器内的骨水泥液注入目标内。
65.进一步的,上述第四步骤的注入过程还包括如下步骤:
66.从动轮每次转动一定角度,完成一定量的骨水泥液注入;完成每次骨水泥液注入后,从动轮归位,进行下一次注入。
67.通过使用本发明的骨水泥远程注入系统及注入方法,可在较远的距离进行注入操作,并实现将骨水泥精准注入椎体内;远距离操作可避免医务人员在操作过程中长时间暴
露在x射线照射环境下。
68.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例的技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1