一种放疗设备的制作方法
1.本发明涉及医疗设备技术领域,具体而言,涉及一种放疗设备。
背景技术:
2.放射治疗设备,简称放疗设备,是一种用于治疗患者肿瘤的医疗设备。其通过射线源产生的高能射线,照射患者的肿瘤区域,从而达到杀死肿瘤细胞的目的。
3.放疗设备通常包括可旋转的机架、设置在机架上的放射源以及用于承载患者的治疗床。在通过放疗设备对患者进行治疗时,首先通过治疗床,对患者进行摆位,并将患者运输至放疗设备的治疗空间内。摆位完成后,放疗设备根据患者对应的治疗计划,控制放射源产生射线束,同时控制机架旋转。从而达到射线束从多个角度照射肿瘤区域的目的,避免患者的健康组织受到损伤。
4.相关技术中,为了准确的确定机架的旋转位置,通常在放疗设备的可旋转机架上设置光栅,并使用传动链的方式使光栅采集机架的位置。但传动链和光栅的模式结构复杂,导致放疗设备的成本增加;并且由于测量精度低,导致机架角度测量不准确,对患者造成损伤。
技术实现要素:
5.本发明的目的在于提供了一种放疗设备,通过角速度检测机构直接检测转动机构的角速度,从而计算射线生成机构的当前角度,该种方式操作简单,仅仅使用角速度检测机构即可实现,降低了放疗设备的成本,同时采用角速度检测机构检测当前角度能够提高测量精度,减少角度检测不准确而对用户造成的伤害。
6.本发明的实施例可以这样实现:
7.本发明实施例提供了一种放疗设备,所述放疗设备包括:射线生成机构、转动机构及角速度检测机构;
8.所述射线生成机构以及所述角速度检测机构均固定设置在所述转动机构上;
9.所述转动机构绕预设轴线旋转,以带动所述射线生成机构旋转;
10.所述射线生成机构用于生成射线,并通过旋转从多个角度照射待治疗对象;
11.所述角速度检测机构用于检测所述转动机构的角速度,以根据所述角速度计算所述射线生成机构的当前角度。
12.在本发明可选的实施例中,所述放疗设备还包括控制机构以及驱动机构;
13.所述角速度检测机构与所述控制机构连接,用于将检测到的所述转动机构的所述角速度发送至所述控制机构;
14.所述控制机构与所述驱动机构连接,用于根据所述角速度计算所述当前角度,并依据所述当前角度生成第一驱动信号,将所述第一驱动信号传输至所述驱动机构;
15.所述驱动机构与所述转动机构连接,用于根据所述第一驱动信号控制所述转动机构。
16.在本发明可选的实施例中,所述控制机构还用于在所述当前角度等于所述当前角度时,生成第二驱动信号;以通过所述第二驱动信号控制所述转动机构停止运动。
17.在本发明可选的实施例中,所述控制机构还用于获取所述射线生成机构的初始角度以及从所述初始角度运动至所述当前角度的运动时间,并依据所述角速度及所述运动时间计算所述射线生成机构从所述初始角度运动至所述当前角度的转动角度,再根据所述初始角度与所述转动角度得到所述当前角度。
18.在本发明可选的实施例中,所述放疗设备还包括第一加速度检测机构,所述第一加速度检测机构安装在所述转动机构上;
19.所述加速度检测机构用于检测所述转动机构的加速度,并将所述加速度传输至所述控制机构,以使控制机构根据所述加速度检测机构算所述转动机构的振动数据。
20.在本发明可选的实施例中,所述控制机构还用于每间隔设定时间获取第一加速度检测机构检测到的所述加速度,以对多个所述加速度进行滤波处理得到所述振动数据,若所述振动数据不在所述合格区间内,则发送第一报警信号。
21.在本发明可选的实施例中,所述控制机构还用于在所述当前角度大于所述当前角度时,发送第二报警信号。
22.在本发明可选的实施例中,所述角速度检测机构包括陀螺仪和/或光栅尺。
23.在本发明可选的实施例中,所述角速度检测机构和所述第一加速度检测机构集成设计。
24.在本发明可选的实施例中,所述放疗设备还包括第二加速度检测机构及治疗床;
25.所述治疗床用于承载待治疗对象,以使所述射线生成机构产生的射线,从多个角度照射待治疗对象;
26.所述第二加速度检测机构设置在所述治疗床上并与所述控制机构连接,用于检测所述治疗床的线加速度,并将所述线加速度发送至所述控制机构;以使所述控制机构根据所述线加速度检测机构算所述治疗床的当前位置。
27.本发明实施例的有益效果:放疗设备包括射线生成机构、转动机构及角速度检测机构;射线生成机构以及角速度检测机构均固定设置在转动机构上;转动机构绕预设轴线旋转,以带动射线生成机构旋转;射线生成机构用于生成射线,并通过旋转从多个角度照射待治疗对象;速度检测机构用于检测转动机构的角速度,以根据角速度计算射线生成机构的当前角度。
28.在本发明实施例中,将角速度检测机构安装在转动机构上,角速度检测机构可直接检测转动机构的角速度,可以通过角速度计算射线生成机构从初始位置转动至当前位置后的当前角度。通过角速度检测机构直接检测转动机构的角速度,从而计算射线生成机构的当前角度,该种方式操作简单,仅仅使用角速度检测机构即可实现,降低了放疗设备的成本,同时采用角速度检测机构检测当前角度能够提高测量精度,减少角度检测不准确而对用户造成的伤害。
附图说明
29.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对
范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
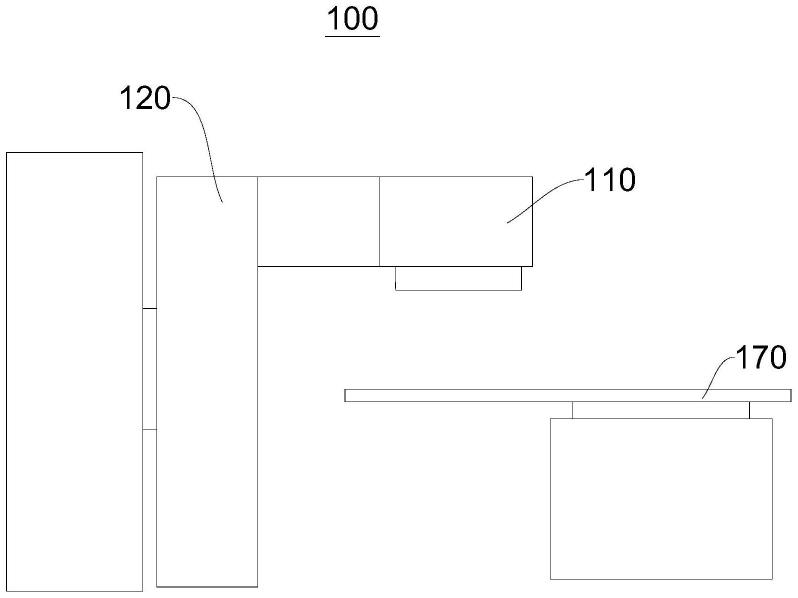
30.图1为本发明实施例提供的放疗设备的机架为悬臂式机架的结构示意图。
31.图2为本发明实施例提供的放疗设备的机架为c形臂机架的结构示意图。
32.图3为本发明实施例提供的放疗设备的机架为滚筒机架的结构示意图。图4为本发明的第一实施例提供的放疗设备的结构示意图。
33.图5为本发明的第一实施例提供的放疗设备的组成框图。
34.图标:100-放疗设备;110-射线生成机构;120-转动机构;130-角速度检测机构;140-控制机构;150-第一加速度检测机构;160-第二加速度检测机构;170-治疗床。
具体实施方式
35.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
36.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
38.在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
40.需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
41.放疗设备100为一种治疗肿瘤的医疗设备,通过设备自身产生的α、β、γ射线或x射线、电子线、质子束及其他粒子束等射线,照射肿瘤细胞,以达到杀死肿瘤细胞的目的。放疗设备100根据射线的类型不同,包括伽马刀、加速器以及质子刀等。放疗设备100的放射源可以用于产生α、β、γ射线或x射线、电子线、质子束及其他粒子束等类型的射线。放疗设备100的机架用于带动放疗设备100旋转。其中,放疗设备100的机架可以为悬臂式机架(如图1)、c形臂机架(如图2)以及滚筒机架(如图3)。本技术实施例可以适用于任意一种机架,以及任意一种射线源。
42.请参阅图4及图5,本实施例提供了一种放疗设备100,本实施例提供的放疗设备100能够通过转动机构120的旋转,从而带动射线生成机构110的旋转,通过角速度检测机构130直接检测转动机构120的角速度,从而计算射线生成机构110的当前角度,该种方式操作简单,仅仅使用角速度检测机构130即可实现,降低了放疗设备100的成本。
43.本实施例提供的放疗设备100包括治疗床170、射线生成机构110及转动机构120,射线生成机构110安装在转动机构120上,患者可以躺在治疗床170上,治疗床170带动患者移动至射线生成机构110产生射束的路径上,在转动机构120的带动下射线生成机构110可相对于患者的待治疗位置旋转,从而实现射束从患者的不同位置照射待治疗位置,避免患者同一位置的健康组织受到过多的辐射剂量,从而保证患者在治疗过程中的安全性,并实现精准定位。
44.其中,射线生成机构110主要是指治疗头,用于产生射束,照射至患者的待治疗位置,从而达到治疗目的。
45.在本实施例中,转动机构120主要用于带动射线生成机构110转动,调节射线生成机构110的角度,为了能够达到精准的控制,通常需要检测转动机构120的转动角度,通过转动机构120的转动角度来计算射线生成机构110当前的角度。通过角速度检测机构130直接检测转动机构120的角速度,从而计算射线生成机构110的当前角度,该种方式操作简单,仅仅使用角速度检测机构130即可实现,降低了放疗设备100的成本,同时采用角速度检测机构130检测当前角度能够提高测量精度,减少角度检测不准确而对用户造成的伤害。
46.在本实施例中,放疗设备100包括:射线生成机构110、转动机构120及角速度检测机构130;射线生成机构110以及角速度检测机构130均固定设置在转动机构120上;转动机构120绕预设轴线旋转,以带动射线生成机构110旋转;射线生成机构110用于生成射线,并通过旋转从多个角度照射待治疗对象;角速度检测机构130用于检测转动机构120的角速度,以根据角速度计算射线生成机构110的当前角度。
47.在本实施例中,将角速度检测机构130安装在转动机构120上,角速度检测机构130可直接检测转动机构120的角速度,通过角速度计算射线生成机构110从初始位置转动至当前位置后的当前角度。通过角速度检测机构130直接检测转动机构120的角速度,从而计算射线生成机构110的当前角度,该种方式操作简单,仅仅使用角速度检测机构130即可实现,降低了放疗设备100的成本,同时采用角速度检测机构130检测当前角度能够提高测量精度,减少角度检测不准确而对用户造成的伤害。
48.其中,射线生成机构110与角速度检测机构130,可以设置在转动机构120的同一位置上,也可以设置在不同位置上;只需要满足在转动的过程中射线生成机构110与角速度检测机构130之间的相对位置关系不变即可,本技术实施例对其设置位置不做具体限定。示例的,射线生成机构110与角速度检测机构130可以设置在同一位置上。初始位置是指转动机构120在未转动之前射线生成机构110的位置,当前位置是指转动机构120在当前时刻的位置,当前角度则是至转动机构120在当前位置的角度值。
49.在本实施例中,放疗设备100还包括控制机构140以及驱动机构;角速度检测机构130与控制机构140连接,用于将检测到的转动机构120的角速度发送至控制机构140;控制机构140与驱动机构连接,用于根据角速度计算当前角度,并依据当前角度生成第一驱动信号,将第一驱动信号传输至驱动机构;驱动机构与转动机构120连接,用于根据第一驱动信号控制转动机构120。
50.在本实施例中,在检测到转动机构120的角速度后,可以根据在初始位置的初始角度以及角速度计算出在当前位置的当前角度。在本实施例中,角速度检测机构130用于每间隔单位时间检测一次角速度,控制机构140用于对角速度进行单位时间的积分得到单位角
度,并累加运动时间内所有的单位角度得到转动角度。其中,间隔时间可以根据实际需求进行设置,间隔时间越小,位置精度越高,但数据量以及计算量过大;间隔时间也可以为零。本技术实施例对间隔时间不做具体限定,以实际使用需求进行设定。
51.为了能够提高转动角度的计算精度,采用积分的方式计算转动角度可以减小角速度检测误差带来的转动角度的误差。
52.当然除此之外,还可以获取在运动时间内的平均角速度,计算平均角速度及运动时间的乘积得到转动角度。
53.在当前角度不等于目标角度的条件下,表示转动机构120还未运动到目标角度,还需要进一步调节转动机构120的位置,因此生产第一驱动信号,通过驱动机构带动转动机构120转动,从而驱动转动机构120继续转动。
54.其中,目标角度表示转动机构120转动至目标位置时的角度,当转动机构120转动至目标位置后表示转动机构120已经运动至需要停止的位置,即到达患者的待治疗位置。
55.容易理解的是,第一驱动信号是指控制转动机构120转动的信号,第一驱动信号中可以包括控制转动机构120转动的角速度,还可以包括转动机构120的转动方向。
56.在本实施例中,控制机构140还用于在当前角度等于目标角度时,生成第二驱动信号;以通过第二驱动信号控制转动机构120停止运动。
57.在本实施例中,在当前角度等于目标角度的条件下说明转动机构120带动射线生成机构110已经运动至需要停止的位置,即患者的待治疗位置,则此时控制机构140生成第二驱动信号,从而控制转动机构120停止运动。
58.容易理解的是,第二驱动信号为控制转动机构120停止转动的信号。
59.在本实施例中,控制机构140还用于获取射线生成机构110的初始角度以及从初始角度运动至当前角度的运动时间,并依据角速度及运动时间计算射线生成机构110从初始角度运动至当前角度的转动角度,再根据初始角度与转动角度得到当前角度。
60.在本实施例中,在检测到转动机构120的角速度后,可以根据在初始位置的初始角度、从初始位置运动至当前位置的运动时间以及角速度可计算出在当前位置的当前角度。示例的,可以通过对角速度进行积分的形式得到转动角度;也可以通过计算平均速度,再乘以运动时间的方式得到转动角度。最后,将转动角度与初始角度求和得到当前角度。其中,运动时间是指从初始位置运动到当前位置的转动时间,初始角度是指射线生成机构110在初始位置时的角度值。
61.在本实施例中,角速度检测机构130用于每间隔单位时间检测一次角速度,控制机构140用于对角速度进行单位时间的积分得到单位角度,并累加运动时间内所有的单位角度得到转动角度。其中,间隔时间可以根据实际需求进行设置,间隔时间越小,位置精度越高,但数据量以及计算量过大;间隔时间也可以为零。本技术实施例对间隔时间不做具体限定,以实际使用需求进行设定。
62.为了能够提高转动角度的计算精度,采用积分的方式计算转动角度可以减小角速度检测误差带来的转动角度的误差。
63.当然除此之外,还可以获取在运动时间内的平均角速度,计算平均角速度及运动时间的乘积得到转动角度。
64.在本实施例中,放疗设备100还包括第一加速度检测机构150,第一加速度检测机
构150安装在转动机构120上;加速度检测机构用于检测转动机构120的加速度,并将加速度传输至控制机构140,以使控制机构140根据加速度检测机构算转动机构120的振动数据。
65.第一加速度检测机构150主要用于检测线速度,在转动机构120转动的过程中,可能会产生非预期运动方向上的摆动,则第一加速度检测机构150主要用于检测非旋转方向的运动数据,示例的,用于检测转动机构120突然出现的轴向平移或者振动。
66.在本实施例中,第一加速度检测机构150用于每间隔设定时间获取转动机构120加速度,从而获取得到振动数据。
67.为了能够检测到多个转动机构120的振动数据,在每间隔设定时间则获取一次转动机构120加速度,多个转动机构120加速度在滤波后形成了振动数据。在本实施例中,多个转动机构120加速度中可能存在误差,则采用中值滤波法对多个转动机构120加速度进行滤波处理得到振动数据。
68.其中,设定时间一般情况下都较小,本技术实施例不对设定时间进行具体限定,设置数值可根据实际需求自行设定。示例的,可以设置为0.2s。
69.在本实施例中,控制机构140还用于每间隔设定时间获取第一加速度检测机构150检测到的加速度,以对多个加速度进行滤波处理得到振动数据,若振动数据不在合格区间内,则发送第一报警信号。
70.在本实施例中,合格区间为转动机构120在转动过程中的稳定活动范围,振动数据在合格区间内,则表示转动机构120上的射线生成机构110能够正常工作,保证治疗效果。若振动数据不在合格区间内,则说明转动机构120可能出现了轴向较大的平移,则放疗设备100可能存在故障,则发送第一报警信号,提醒用户及时查看。
71.在本实施例中,控制机构140还用于在当前角度大于目标角度时,发送第二报警信号。
72.在本实施例中,若当前角度大于目标角度,则说明转动机构120已经越过需要停止的位置,转动机构120转动过度,则发送第二报警信号,提醒转动机构120转动过度,方便用户或者控制机构140及时停止放疗设备100。
73.在本实施例中,角速度检测机构130包括陀螺仪和/或光栅尺。换言之,角速度检测机构130可以包括陀螺仪与光栅尺中的任意一种,也可以包括陀螺仪和光栅尺。通过冗余设计能够进一步的提高角度检测的精准度。
74.陀螺仪是利用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。
75.陀螺仪可感测一轴或多轴的旋转角速度,可精准感测自由空间中的复杂移动动作,因此,陀螺仪成为追踪物体移动方位与旋转动作的必要运动传感器。当转动机构120的姿态发生旋转,角速度检测机构130的整体姿态也会变化,从平置变为直立,其中转动机构120旋转的角度就是角速度检测机构130本身变化角度。
76.在本实施例中,角速度检测机构130和第一加速度检测机构150集成设计。
77.其中,角速度检测机构130可以为三轴陀螺仪;第一加速度检测机构150可以为三轴加速度计。第一加速度检测机构150与角速度检测机构130集成设计能够使同一个结构完成角速度以及线加速度的检测,快捷方便。
78.在本实施例中,放疗设备100还包括第二加速度检测机构160及治疗床170;
79.治疗床170用于承载待治疗对象,以使射线生成机构110产生的射线,从多个角度照射待治疗对象;
80.第二加速度检测机构160设置在治疗床170上并与控制机构140连接,用于检测治疗床170的线加速度,并将线加速度发送至控制机构140;以使控制机构140根据线加速度检测机构算治疗床170的当前位置。
81.将第二加速度检测机构160安装在治疗床170上,通过第二加速度检测机构160可以检测治疗床170的移动位移,从而可以计算治疗床170的当前位置的目标位移。
82.同样的,起始位置是指治疗床170在未移动之前的位置,当前位置是指治疗床170目前的位置,而目标位移则是指治疗床170在当前位置的位移值。
83.在本实施例中,控制机构140与第二加速度检测机构160电连接,用于接收线加速度,并获取治疗床170在起始位置的初始位移及治疗床170从起始位置运动至当前位置的治疗床运动时间,依据线加速度及治疗床运动时间计算治疗床170从起始位置运动至当前位置的线位移,计算初始位移与线位移的和得到目标位移。
84.其中,治疗床运动时间是指治疗床170从起始位置移动至当前位置的移动时间,初始位移则是指治疗床170在起始位置时的位移。
85.在本实施例中,在治疗床170开始移动时对治疗床170的移动时间开始计时得到治疗床运动时间,通过线加速度及治疗床运动时间可以得到治疗床170在治疗床运动时间内的线位移,再计算初始位移与线位移的和得到目标位移。
86.在本实施例中,第二加速度检测机构160用于每间隔预设时间检测一次线加速度;控制机构140用于对线加速度进行预设时间的积分得到单位位移,并累加治疗床运动时间内所有的单位位移得到线位移。
87.在本实施例中,为了能够提高线位移的计算精度,采用积分的方式计算线位移可以减小线加速度检测误差带来的线位移的误差。
88.容易理解的是,除了通过积分的方式以外,还可以获取平均线加速度,通过平均线加速度以及治疗床运动时间来计算线位移。
89.本实施例提供的放疗设备100的工作原理:在本实施例中,角速度检测机构130安装在转动机构120上获取射线生成机构110转动的角速度,并通过控制机构140计算出射线生成机构110转动至当前位置的当前角度。同样的,通过第二加速度检测机构160获取治疗床170的线加速度,通过线加速度检测机构算出治疗床170在当前位置的目标位移。
90.综上所述,本实施例提供的放疗设备100,通过角速度检测机构130直接检测转动机构120的角速度,从而计算射线生成机构110的当前角度,该种方式操作简单,仅仅使用角速度检测机构130即可实现,降低了放疗设备100的成本,同时采用角速度检测机构130检测当前角度能够提高测量精度,减少角度检测不准确而对用户造成的伤害。
91.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1