一种外骨骼机器人的外骨骼机构及外骨骼机器人的制作方法
1.本发明涉及外骨骼机器人领域,尤其是涉及了一种外骨骼机器人的外骨骼机构及外骨骼机器人。
背景技术:
2.智能仿生研究中心已经成功研发或正在研发的还有柔性外骨骼机器人、自平衡下肢外骨骼机器人和负重外骨骼机器人等,这些研发成果将提高行走功能障碍患者和行动不便老人的生活质量。对于下肢瘫痪的病人、残疾人和行动不便的老人来说,自主出门行走是很难实现的,为帮助他们康复训练与助力行走,设计一种下肢助行外骨骼机器人,对于患者的行走以及患者的康复具有极其重要的作用。
3.但是目前助行类和脑卒中康复类下肢外骨骼机器人与人体连接依靠关节电机提供扭矩输出,连接刚性太大,当扭矩过大会产生旋转电机过载发热,目前还没有一种很有效的下肢外骨骼机器人具备过扭矩打滑的功能,并缺乏与之相配套的外骨骼机构,引用专利号cn209966955u一种下肢外骨骼机器人外骨骼机构,包括:支架背板、支架右侧板、支架左侧板、支架大腿右侧板和支架大腿左侧板,支架背板的两侧分别连接支架右侧板的一端和支架左侧板的一端,支架右侧板的另一端连接支架大腿右侧板,支架左侧板的另一端连接支架大腿左侧板构成包裹人体的躯干机构。
4.上述装置虽然能够对通过将整个机器人包裹人体的躯干,根据人体的实际尺寸进行调节,使得该机器人的旋转动力部件的旋转动力部件的旋转电机的输出轴和人体髋关节的旋转轴重合来来解决扭矩过大会产生旋转电机过载发热的但是上述装置还存在以下问题,第一,支架左侧板和支架右侧板是通过螺栓安装于支架背板上的,因每个患者体型不同所以无法精确调节支架左侧板和支架右侧板的位置,影响患者使用;第二,支架左侧板、支架右侧板、支架大腿左侧板和支架大腿右侧板在进行调节时都是通过多个螺栓的拆卸,操作十分繁琐,不够便捷。
技术实现要素:
5.本发明的目的在于提供一种外骨骼机器人的外骨骼机构,以解决现有技术中支架左侧板和支架右侧板无法根据不同患者的体型精确调节位置,影响穿戴的技术问题。
6.本发明提供一种外骨骼机器人的外骨骼机构,包括腰部固定组件和腿部固定组件,所述腿部固定组件可拆卸的安装于腰部固定组件上,所述腰部固定组件包括支撑背板、左支撑板和右支撑板,所述左支撑板和右支撑板对称插接设置在支撑背板(2)的两端,所述腿部固定组件包括安装于左支撑板上的第一夹紧部件和安装于右支撑板上的第二夹紧部件,所述第一夹紧部件和第二夹紧部件均包括调节件和夹持件,所述调节件和夹持件通过旋转动力件相连接。
7.进一步的,所述左支撑板和右支撑板均呈l形,所述左支撑板和右支撑板延伸至支撑背板内的一端均设有调节齿条,左支撑板和右支撑板的另一端设有与调节件相配合的定
位板,所述左支撑板和右支撑板上设有通风孔且通风孔内设有与左右支撑板插接配合的档尘网。
8.所述左支撑板和右支撑板上设有圆弧过渡部且圆弧过渡部上设有若干个散热孔,所述通风孔的内壁上开设有用以限位定位板的限制槽。
9.进一步的,所述定位板与左右支撑板滑动配合且左右支撑板上水平设置有调节滑槽,所述调节滑槽的一侧设置有供手部拉动的通槽,左右支撑板的外侧壁上设有与限制槽插接配合的限制弹块,所述调节滑槽内设有固定螺栓且固定螺栓的一端穿过左支撑板与调节件螺纹配合,左右支撑板的外侧壁上设有用于限位定位板的拧紧螺杆,所述拧紧螺杆与左支撑板螺接配合。
10.进一步的,所述支撑背板内设有用于供两个调节齿条移动的滑槽,支撑背板内设有与上下两个调节齿条啮合的控制齿轮,所述控制齿轮上设有延伸出支撑背板外的控制杆,所述控制杆上设有旋转把手且旋转把手上设有凸棱,所述控制杆上设有供凸棱滑动的移动槽,所述支撑背板上设有用于限制旋转把手的限位挡块,所述支撑背板的内侧壁上设有用于贴合腰部的乳胶垫。
11.进一步的,所述支撑背板的下方设有若干个与胯部贴合的辅助件,每个辅助件均包括弧形块、支撑板和定位轴,所述支撑板倾斜设置且支撑板与支撑背板固定连接,弧形块套接于定位轴上且弧形块通过螺母与定位轴固定连接,所述定位轴水平设置且定位轴与支撑板端部固定连接。
12.进一步的,所述调节件包括调节板和延长板,所述调节板上设有调节槽且调节槽旁侧设有与固定螺栓螺纹配合的固定螺母,延长板位于调节板的正下方且延长板与调节板滑动配合,所述调节板上设有若干个锁止孔且延伸板上设有与锁止孔相配合的锁止按钮。
13.进一步的,所述夹持件包括延伸板和夹持弧板,所述延伸板通过所述旋转动力件安装于延长板上,夹持弧板与延伸板滑动配合且延伸板上设有用以限位夹持弧板的定位螺杆,所述定位螺杆与延伸板螺纹配合且定位螺杆的一端与夹持弧板贴合,定位螺杆的另一端设有旋拧块。
14.进一步的,所述支撑背板上设有两个背负带且两个背负带间隔设置,两个背负带的一端均与支撑背板的顶部固定连接,两个背负带的另一端均设有插接头,两个所述插接头插接在支撑背板底部对应设置的两个插接块内,两个背负带上均设有海绵垫且每个海绵垫上均设有魔术贴粘面。
15.进一步的,所述支撑背板的前端设有束紧带且束紧带的两端均设有束紧头,左右支撑板上对应两个束紧头均设有束紧块,每个束紧块上均设有限位弹片。
16.一种外骨骼机器人,该外骨骼机器人安装有如权利要求1-9任一项所述的一种外骨骼机器人的外骨骼机构。
17.与现有技术相比较,本发明的有益效果在于:
18.其一,本发明在需要对穿戴时,首先将支撑背板于患者腰部贴合后,转动旋转把手使控制杆带动控制齿轮旋转,控制齿轮能够同时带动两个调节齿条相向或相背移动,两个调节齿条同步移动能够带动左支撑板和右支撑板同步移动,控制齿轮与两个调节齿条的配合能够精确控制左支撑板和右支撑板的位置,达到根据不同患者的体型精确调节位置,提高本发明的适用性。
19.其二,设置在左支撑板内的定位板通过一个螺栓与调节板固定连接,当需要根据患者体型调节定位板时,通过手部伸入通槽内拉动定位板至合适位置后,通过旋转拧紧螺杆将定位板限位在左支撑板上,当需要根据患者体型调节调节板时,送开固定螺母后竖直移动调节板使调节板通过调节槽在固定螺栓上滑动到合适位置后,再次紧固固定螺母使调节板与固定板紧密贴合,通过上述步骤能够根据患者的体型调节定位板和调节板的位置,以满足不同体型的患者,提高适用性。
20.其三,设置的调节板和延长板能够根据患者的身高调节调节延长板在调节板内的位置,当需要调节延长板位置时,按压锁止按钮后滑动延长板将锁止按钮与对应的锁止孔限位配合,达到移动调节延长板的目的。
21.其四,左支撑板上设置的通风孔和若干个散热孔均用于帮助患者散热,避免热量堆积在患者腰部,导致患者闷热、流汗和烦躁,影响使用效果。
22.其五,设置的辅助件用以对患者的胯部进行抵触按压,弧形板能够对患者的腰部和跨部进行抵触,并且在患者走动时对腰部和跨部进行按摩,缓解腰部和跨部肌肉疲劳。
附图说明
23.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
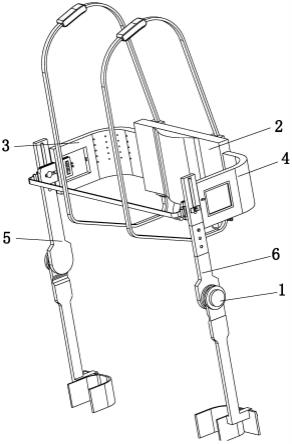
24.图1为本发明的立体结构示意图;
25.图2为本发明的剖视图;
26.图3为本发明局部的立体结构示意图;
27.图4为本发明的局部剖视图;
28.图5为本发明背板的局部放大图;
29.图6为本发明左支撑板的立体结构示意图;
30.图7为本发明左支撑板的局部放大图一;
31.图8为本发明左支撑板的局部放大图二;
32.图9为本发明第一夹紧部件的立体结构示意图;
33.图10为本发明夹持件的立体结构示意图;
34.图11为本发明束紧头和束紧块的装配放大图。
35.附图标记:旋转动力件1,支撑背板2,控制齿轮21,控制杆22,旋转把手23,限位挡块24,背负带25,海绵垫26,束紧带27,束紧头28,束紧块29,限位弹片210,左支撑板3,调节齿条31,定位板32,通风孔33,散热孔34,限制槽35,调节滑槽36,限制弹块37,固定螺栓38,拧紧螺杆39,右支撑板4,第一夹紧部件5,调节件51,调节板511,延长板512,调节槽513,固定螺母514,锁止孔515,锁止按钮516,夹持件52,延伸板521,夹持弧板522,定位螺杆523,旋拧块524,第二夹紧部件6,辅助件7,弧形块71,支撑板72,定位轴73。
具体实施方式
36.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施
例是本发明一部分实施例,而不是全部的实施例。
37.通常在此处附图中描述和显示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
38.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
41.下面结合图1和图11所示,本发明实施例提供了一种外骨骼机器人的外骨骼机构,包括腰部固定组件和腿部固定组件,所述腿部固定组件可拆卸的安装于腰部固定组件上,所述腰部固定组件包括支撑背板2、左支撑板3和右支撑板4,所述左支撑板3和右支撑板4对称插接设置在支撑背板2的两端,所述腿部固定组件包括安装于左支撑板3上的第一夹紧部件5和安装于右支撑板4上的第二夹紧部件6,所述第一夹紧部件5和第二夹紧部件6均包括调节件51和夹持件52,所述调节件51和夹持件52通过旋转动力件(1)相连接。
42.具体地,所述左支撑板3和右支撑板4均呈l形,所述左支撑板3和右支撑板4延伸至支撑背板2内的一端均设有调节齿条31,左支撑板3和右支撑板4的另一端设有与调节件51相配合的定位板32,所述左支撑板3和右支撑板4上均设有通风孔33且通风孔33内设有与左右支撑板插接配合的档尘网,所述左支撑板3和右支撑板4上设有圆弧过渡部且圆弧过渡部上设有若干个散热孔34,所述通风孔33的内壁上开设有用以限位定位板32的限制槽35,设置的通风孔33和若干个散热孔34均用于帮助患者散热,避免热量堆积在患者腰部,导致患者闷热、流汗和烦躁,影响使用效果。
43.具体地,所述定位板32与左右支撑板滑动配合且左右支撑板上水平设置有调节滑槽36,所述调节滑槽36的旁侧设置有供手部拉动的通槽,所述左右支撑板的外侧壁上设有与限制槽35插接配合的限制弹块37,所述调节滑槽36内设有固定螺栓38且固定螺栓38的一端穿过左支撑板3与调节件51螺纹配合,所述左右支撑板的外侧壁上设有用于限位定位板32的拧紧螺杆39,所述拧紧螺杆39与左支撑板3螺接配合,当需要根据患者体型调节定位板32时,通过手部伸入通槽内拉动定位板32至合适位置后,通过旋转拧紧螺杆39将定位板32限位在左右支撑板上,当定位板32不使用时,拉动定位板32使限位弹板与限制槽35插接配合,以减少左右支撑板放置时的所占面积。
44.具体地,所述支撑背板2内设有用于供两个调节齿条31移动的滑槽,支撑背板2内设有与上下两个调节齿条31啮合的控制齿轮21,所述控制齿轮21上设有延伸出支撑背板2
外的控制杆22,所述控制杆22上设有旋转把手23且旋转把手23上设有凸棱,所述控制杆22上设有供凸棱滑动的移动槽,所述支撑背板2上设有用于限制旋转把手23的限位挡块24,所述支撑背板2的内侧壁上设有用于贴合腰部的乳胶垫25,设置的乳胶垫25用于贴合患者的腰部,以避免支撑背板2与患者背部发生摩擦,将支撑背板2于患者腰部贴合后,转动旋转把手23使控制杆22带动控制齿轮21旋转,控制齿轮21能够同时带动两个调节齿条31相向或相背移动,两个调节齿条31同步移动能够带动左支撑板3和右支撑板4同步移动,控制齿轮21与两个调节齿条31的配合能够精确控制左支撑板3和右支撑板4的位置,达到根据不同患者的体型精确调节位置,提高本发明的适用性。
45.具体地,所述支撑背板2的下方设有若干个与胯部贴合的辅助件7,每个辅助件7均包括弧形块71、支撑板72和定位轴73,所述支撑板72倾斜设置且支撑板72与支撑背板2固定连接,弧形块71套接于定位轴73上且弧形块71通过螺母与定位轴73固定连接,所述定位轴73水平设置且定位轴73与支撑板72端部固定连接,弧形板能够对患者的腰部和跨部进行抵触,并且在患者走动时对腰部和跨部进行按摩,缓解腰部和跨部肌肉疲劳,通过松开螺母能够调节弧形块71对患者腰部按压的位置,弧形块71上包覆有软皮革。
46.具体地,所述调节件51包括调节板511和延长板512,所述调节板511上设有调节槽513且调节槽513旁侧设有与固定螺栓38螺纹配合的固定螺母514,延长板512位于调节板511的正下方且延长板512与调节板511滑动配合,所述调节板511上设有若干个锁止孔515且延伸板521上设有与锁止孔515相配合的锁止按钮516,当需要根据患者体型调节调节板511时,松开固定螺母514后竖直移动调节板511使调节板511通过调节槽513在固定螺栓38上滑动到合适位置后,再次紧固固定螺母514使调节板511与固定板紧密贴合,通过上述步骤能够根据患者的体型调节定位板32和调节板511的位置,以满足不同体型的患者,提高适用性,调节板511通过松紧带能够束缚于患者的大腿上。
47.具体地,所述夹持件52包括延伸板521和夹持弧板522,所述延伸板521通过所述旋转动力件1安装于延长板512上,夹持弧板522与延伸板521滑动配合且延伸板521上设有用以限位夹持弧板522的定位螺杆523,所述定位螺杆523与延伸板521螺纹配合且定位螺杆523的一端与夹持弧板522贴合,定位螺杆523的另一端设有旋拧块524,设置的夹持弧板522能够在延伸板521上滑动从而调节夹持弧板522与延伸板521之间的距离,当需要对不同腿型的患者夹紧时,移动夹持弧板522使其与患者小腿贴合后,通过转动旋拧块524使定位螺杆523与夹持弧板522贴合并且对夹持弧板522进行限位固定。
48.具体地,所述支撑背板2上设有两个背负带25且两个背负带25间隔设置,两个背负带25的一端均与支撑背板2的顶部固定连接,两个背负带25的另一端均设有插接头,支撑背板2的底部对应两个插接头设有两个插接块,两个背负带25上均设有海绵垫26且每个海绵垫26上均设有魔术贴粘面,通过两个背负带25能够将支撑背板2穿戴与患者的腰部,并且设置的海绵垫26能够在对应的背负带25上滑动,以减轻背负带25对患者肩部的压力,设置的魔术贴粘面与衣服的毛面粘接能够防止海绵垫26在背负带25上随意移动。
49.具体地,所述支撑背板2的前端设有束紧带27且束紧带27的两端均设有束紧头28,所述左支撑板3和右支撑板4上对应两个束紧头28均设有束紧块29,每个束紧块29上均设有限位弹片210,设置的束紧带27用以便于患者穿戴,通过束紧头28与束紧块29插接配合使束紧带27能够对患者进行限位,设置的限位弹片210用于防止束紧头28插接于束紧块29内后
脱离束紧块29。
50.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1