一种超声引导下椎管内麻醉的定位辅助设备的制作方法
1.本发明涉及医疗辅助设备领域,具体涉及一种超声引导下椎管内麻醉的定位辅助设备。
背景技术:
2.将麻醉药物注入椎管的蛛网膜下腔或硬膜外腔,脊神经根受到阻滞使该神经根支配的相应区域产生麻醉作用,统称为椎管内麻醉。椎管内麻醉是临床下腹部和下肢手术的常用麻醉方法,传统的椎管内麻醉是通过解剖定位来确定穿刺点,通过麻醉医师的经验来确定穿刺置管是否到位。超声能够清楚地显示椎管及其周围解剖结构,使椎管内麻醉走向可视化、精准化,具有重大意义,特别是对于老年人、肥胖患者、孕妇、腰椎退行性病变患者、既往腰椎手术史及解剖异常患者。
3.现有的椎管内麻醉的操作方式通常由医师根据超声图像结合经验判定确定穿刺间隙及穿刺点,并在皮肤上划线进行标记(如图13所示),并后续由麻醉医师根据上述划线标记配合经验进行穿刺。这类麻醉的操作方式由于需要多名医生依次配合进行,因此容易在前后操作的衔接过程中出现误差,对医生的操作水平和医生之间的配合工作水平要求高,同时在超声图像判断无误的情况下划线的准确性和麻醉医师对于麻醉针的穿刺角度的理解都可能存在偏差,从而影响超声引导下椎管内麻醉操作的准确性。
4.申请号为202111090546.7的发明专利公开了一种超声引导下椎管内麻醉的定位扫描系统,包括超声探头、用于的引导麻醉针针管插入的针导引器;固定安装在超声探头上的第一激光定位器;用于安装在针导引器上的第二激光定位器;用于敷贴在后背上的定位敷贴。该发明通过多个射线在平面上的投影射线可以实现立体空间下的角度和方向的定位,从而方便了麻醉医师根据确定的坐标体系去判定穿刺方向和穿刺点,避免了麻醉医师误判造成的穿刺方式不准确的问题,但由于本发明采用激光射线进行照射点标记定位的方式,进行二次对准定位时对操作者手持操作的稳定性要求高,且对准后的设备位置状态存在不稳定的情况,从而导致前后两次对准中超声探头和麻醉针的位置存在偏差,进而在一定程度上影响椎管内麻醉的准确性。
5.申请号为202010739952.0的发明专利公开了一种超声麻醉的可调麻醉辅助定位穿刺装置,包括有麻醉可调固定模块、单向限位机构模块以及多角度辅助定位注射模块,可调麻醉辅助定位穿刺装置上部通过麻醉可调固定模块与现有的超声探头固定连接,下部直接与皮肤进行接触,利用单向的单向限位机构模块进行定位;后将穿刺针插入多角度辅助定位注射模块中,将穿刺针通过多角度辅助定位注射模块沿穿刺路径下滑至表肤,并向下穿刺完成麻醉术。该发明在二次定位的过程中穿刺针的穿刺角度受到多角度穿刺架的限制,存在使用的局限性,且多角度穿刺架上穿刺角度的选择受到麻醉医师对超声图像进行解读经验的影响,容易存在偏差。
技术实现要素:
6.本发明的目的在于提供一种提高操作便利性和准确性的超声引导下椎管内麻醉的定位辅助设备。
7.本发明解决上述问题所采用的技术方案是:
8.一种超声引导下椎管内麻醉的定位辅助设备,包括能够用于超声探头可拆卸式安装的主体件和能够可拆卸式安装于主体件上的导针套,导针套用于引导麻醉针沿导针套的中轴线直线移动,超声探头或导针套安装于主体件上时,主体件的中轴线与两者中任意一个的中轴线均处于同一直线上且超声探头和导针套的下端均外露相同长度于主体件外,所述主体件的外侧面上铰接有三个可折叠式的支撑脚,主体件上设有用于驱动支撑脚沿主体件的径向收拢及展开的驱动单元,三个支撑脚同时展开且三者中至多两个支撑脚的展开行程相同。
9.作为上述技术方案的进一步改进,所述支撑脚包括第一活动杆和第二活动杆,三个支撑脚中的第一活动杆的长度均相同且三个支撑脚中至多两个第二活动杆的长度相同,所述第一活动杆的一端铰接于主体件的外侧面上,第一活动杆的另一端与第二活动杆的一端铰接,第二活动杆的另一端通过球头连接机构连接有支撑块,支撑块的底面的中心位置上安装有压力传感器。通过压力传感器的使用,使得支撑块与皮肤接触时能够由压力传感器检测并反馈的压力信号来控制驱动单元停止对支撑脚的驱动,即当压力传感器检测的压力数值超出预设值时,驱动单元停止运作,从而保障了对三个支撑脚进行抵住位置调整的便利性,避免了由于支撑脚展开过度对支撑脚位置调整造成阻碍,主体件的外侧面上设有用于区分三个支撑脚的标记。
10.作为上述技术方案的进一步改进,所述驱动单元包括第二驱动电机、第一滑块、第一连杆、第二连杆以及第二滑块,第二驱动电机安装于主体件的外侧面上,第一滑块滑动设置于主体件的外侧面上,第二驱动电机用于驱动第一滑块竖直直线移动,第一活动杆的中间位置和第一滑块之间通过第一连杆实现连接,第一连杆的两端分别铰接于第一滑块和第一活动杆上,第二活动杆的中间位置和第二滑块之间通过第二连杆实现连接,第二连杆的两端分别铰接于第二滑块和第二活动杆上,第二滑块滑动连接于第一活动杆上,第一活动杆的另一端和第二滑块之间设有拉簧,拉簧的两端分别固定于第一活动杆的另一端和第二滑块上,主体件的外侧面上设有限位块,限位块的一端一体式连接于主体件的外侧面上,限位块的另一端位于第一活动杆的转动行程上,支撑脚未展开时,限位块的另一端抵住第二滑块,限位块和第二滑块之间相抵住的侧面中任意一个或两个侧面呈弧面状。
11.使用时,通过第二驱动电机驱动第一滑块竖直向下移动,使得第一滑块经第一连杆来驱动第一活动杆的另一端绕第一活动杆和主体件之间的铰接位置转动,从而第一活动杆和主体件之间的夹角逐渐扩大。当第一活动杆和主体件之间的夹角达到特定角度后,第二滑块和限位块之间脱离,此时第一活动杆和第二活动杆之间解除锁住状态。在第一滑块继续竖直向下移动的过程中,第二滑块在拉簧的作用下从第一活动杆的一端向其另一端直线移动,使得第二滑块经第二连杆来驱动第二活动杆的另一端绕第二活动杆和第一活动杆之间的铰接位置转动,从而第一活动杆和第二活动杆之间的夹角逐渐扩大至最大。
12.作为上述技术方案的进一步改进,所述主体件包括支撑套、用于超声探头固定的固定套以及手柄件,所述固定套转动设置于支撑套的中空空间内,支撑套上安装有用于驱
动固定套相对支撑套进行转动的驱动模块,所述手柄件的下端通过螺纹连接至固定套的上端上,手柄件上开设有沿手柄件的轴向贯穿手柄件的导向通道,导向通道与固定套的中空空间相连通,导向通道用于引导超声探头的线缆或麻醉针的针管穿过,手柄件的上端外露于支撑套的上端外,手柄件的上端上设有若干等间距排布的凸环,利于提高使用者对设备的手持效果。
13.作为上述技术方案的进一步改进,所述驱动模块包括第一驱动电机和齿轮传动机构,第一驱动电机安装于支撑套上,第一驱动电机和固定套之间通过齿轮传动机构实现传动连接,所述齿轮传动机构包括齿轮和外齿圈,齿轮固定于第一驱动电机的输出轴上,外齿圈和齿轮啮合,外齿圈套设并固定于固定套上。通过第一驱动电机驱动固定套转动,当手持手柄件使得固定套保持固定不动时,支撑套能够相对固定套转动,从而调整支撑套上三个支撑脚的位置,使得三个支撑脚的展开长度能够满足对主体件进行支撑的需求。
14.作为上述技术方案的进一步改进,所述固定套的内壁面上两个相对的位置上均开设有用于分别容纳超声探头上两个凸块的凹槽,利于保障超声探头在固定套上固定的稳定性,避免了出现固定套上超声探头出现转动移位的情况。
15.作为上述技术方案的进一步改进,所述导针套呈锥状,导针套的中空空间内一体式连接有若干绕导针套的中轴线等角度排布的引导片,引导片之间形成用于麻醉针的针管穿过的导针通道,利于提高麻醉针在设备上的固定效果,从而保障了麻醉针穿刺的准确性。
16.作为上述技术方案的进一步改进,所述导针套的中空空间内设有导针座,麻醉针的针头能够插设于导针座上,针头的针尖能够穿过导针座并外露于导针套的下端外,利于保证麻醉针在设备上的固定强度,从而保障了穿刺的准确性。
17.作为上述技术方案的进一步改进,所述第一活动杆的另一端上沿第一活动杆的上边沿设有限位片,限位片呈l形,限位片包括横向段和纵向段,横向段位于第二活动杆相对第一活动杆向外转动的行程上,纵向段位于第二活动杆相对第一活动杆向内转动的行程上,利于避免支撑脚出现过度展开或折叠的情况。
18.本发明与现有技术相比,具有以下优点和效果:
19.本发明通过超声探头处于最佳穿刺角度时的三个支撑脚在皮肤上的位置可以实现设备上安装麻醉针后麻醉针穿刺角度和方向的定位,利于提高穿刺的准确性和成功率,从而降低穿刺相关并发症,提高患者的安全性、舒适度及满意度。
20.同时,本发明通过主体件和其上三个支撑架实现麻醉针穿刺的精准定位,结构紧凑且保证了设备定位效果的稳定程度,从而避免了设备上超声探头和麻醉针进行更换操作后设备重新定位使用出现误差的情况,利于保障设备的使用效果。
21.进一步的,本发明操作步骤简单,降低了设备对使用者操作水平的要求,便于使用者能够快速实现准确的椎管内麻醉操作,利于普及推广且避免了医师之间操作衔接中存在的偏差,从而保障了椎管内麻醉的操作质量。
附图说明
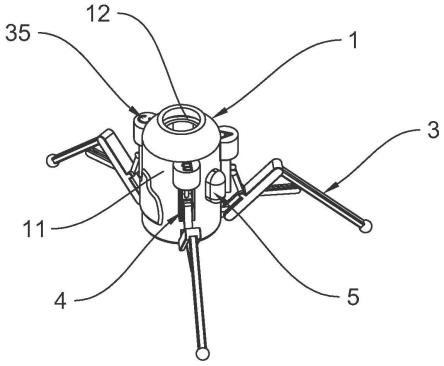
22.图1是本发明一种超声引导下椎管内麻醉的定位辅助设备的结构示意图。
23.图2是本发明安装超声探头后的结构示意图。
24.图3是本发明安装超声探头后的结构示意侧视图。
25.图4是本发明安装超声探头后的结构示意剖视图。
26.图5是本发明安装麻醉针后的结构示意剖视图。
27.图6是图1中所示固定套的结构示意仰视图。
28.图7是图1中所示支撑脚的结构示意图。
29.图8是图1中所示驱动模块的结构示意图。
30.图9是本发明实际使用时的操作示意图。
31.图10是本发明使用状态一的结构示意图。
32.图11是本发明使用状态二的结构示意图。
33.图12是本发明使用状态三的结构示意图。
34.图13是传统椎管内麻醉的操作示意图。
35.其中,主体件1,支撑套11,固定套12,手柄件13,导向通道14,凸环15,凹槽16,导针套2,引导片21,导针通道22,导针座23,支撑脚3,第一活动杆31,第二活动杆32,球头连接机构33,支撑块34,标记35,限位片36,横向段37,纵向段38,驱动单元4,第二驱动电机41,第一滑块42,第一连杆43,第二连杆44,第二滑块45,拉簧46,限位块47,弧面状48,驱动模块5,第一驱动电机51,齿轮传动机构52,齿轮53,外齿圈54,超声探头6,凸块61,麻醉针7。
具体实施方式
36.下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
37.本发明针对现有的超声引导下椎管内麻醉操作方式中存在的只能在皮肤上根据经验进行划线来进行穿刺点标记而无法对麻醉针的穿刺角度和穿刺方向进行定位,以及在超声图像判断无误的情况下划线的准确性和麻醉医师对于麻醉针的穿刺角度的理解都可能存在偏差,从而影响超声引导下椎管内麻醉操作的准确性的情况,提供一种超声引导下椎管内麻醉的定位辅助设备。
38.参见图1-图5,本实施例一种超声引导下椎管内麻醉的定位辅助设备,包括能够用于超声探头6可拆卸式安装的主体件1和能够可拆卸式安装于主体件1上的导针套2,导针套2用于引导麻醉针7沿导针套2的中轴线直线移动,超声探头6或导针套2安装于主体件1上时,主体件1的中轴线与两者中任意一个的中轴线均处于同一直线上且超声探头6和导针套2的下端均外露相同长度于主体件1外,所述主体件1的外侧面上铰接有三个可折叠式的支撑脚3,主体件1上设有用于驱动支撑脚3沿主体件1的径向收拢及展开的驱动单元4,三个支撑脚3同时展开,其中两个支撑脚3的展开行程相同,剩余一个支撑脚3的展开行程与前述的两个支撑脚3的展开行程不相同。
39.参见图3-图5,所述主体件1包括支撑套11、用于超声探头6固定的固定套12以及手柄件13,所述固定套12转动设置于支撑套11的中空空间内,支撑套11上安装有用于驱动固定套12相对支撑套11进行转动的驱动模块5,所述手柄件13的下端通过螺纹连接至固定套12的上端上,手柄件13上开设有沿手柄件13的轴向贯穿手柄件13的导向通道14,导向通道14与固定套12的中空空间相连通,导向通道14用于引导超声探头6的线缆或麻醉针7的针管穿过,手柄件13的上端外露于支撑套11的上端外,手柄件13的上端上设有若干等间距排布的凸环15。
40.参见图5,所述导针套2呈锥状,导针套2的中空空间内一体式连接有若干绕导针套2的中轴线等角度排布的引导片21,引导片21之间形成用于麻醉针7的针管穿过的导针通道22,所述导针套2的中空空间内设有导针座23,麻醉针7的针头能够插设于导针座23上,针头的针尖能够穿过导针座23并外露于导针套2的下端外。本实施例中,所述导针套2可采用过盈连接的方式或螺纹连接的方式安装于支撑套11的下端的开口上。
41.参见图6,所述固定套12的内壁面上两个相对的位置上均开设有用于分别容纳超声探头6上两个凸块61的凹槽16。本实施例中,超声探头6可采用卡扣结构实现其固定于固定套12上。
42.参见图7,所述支撑脚3包括第一活动杆31和第二活动杆32,三个支撑脚3中的第一活动杆31的长度均相同,三个支撑脚3中的其中两个第二活动杆32的长度相同,剩余一个第二活动杆32的长度与前述的两个第二活动杆32的长度不相同,所述第一活动杆31的一端铰接于主体件1的外侧面上,第一活动杆31的另一端与第二活动杆32的一端铰接,在使用过程中,为了减小支撑脚与皮肤抵住时造成皮肤凹陷的程度,所述第二活动杆32的另一端通过球头连接机构33连接有支撑块34,支撑块34的底面的中心位置上安装有压力传感器,主体件1的外侧面上设有用于区分三个支撑脚3的标记35,本实施例中,所述标记35采用字母符号a、b、c。
43.参见图7,所述第一活动杆31的另一端上沿第一活动杆31的上边沿设有限位片36,限位片36一体式连接于第一活动杆31上,限位片36呈l形,限位片36包括横向段37和纵向段38,横向段37位于第二活动杆32相对第一活动杆31向外转动的行程上,纵向段38位于第二活动杆32相对第一活动杆31向内转动的行程上。
44.参见图7,所述驱动单元4包括第二驱动电机41、第一滑块42、第一连杆43、第二连杆44以及第二滑块45,第二驱动电机41安装于主体件1的外侧面上,第一滑块42滑动设置于主体件1的外侧面上,第二驱动电机41用于驱动第一滑块42竖直直线移动,本实施例中,所述第二驱动电机41为螺杆电机,第一滑块42以螺纹配合的方式套设于螺杆电机的输出轴上,第一活动杆31的中间位置和第一滑块42之间通过第一连杆43实现连接,第一连杆43的两端分别铰接于第一滑块42和第一活动杆31上,第二活动杆32的中间位置和第二滑块45之间通过第二连杆44实现连接,第二连杆44的两端分别铰接于第二滑块45和第二活动杆32上,第二滑块45滑动连接于第一活动杆31上,第一活动杆31的另一端和第二滑块45之间设有拉簧46,拉簧46的两端分别固定于第一活动杆31的另一端和第二滑块45上,主体件1的外侧面上设有限位块47,限位块47的一端一体式连接于主体件1的外侧面上,限位块47的另一端位于第一活动杆31的转动行程上,支撑脚3未展开时,限位块47的另一端抵住第二滑块45,限位块47和第二滑块45之间相抵住的侧面均呈弧面状48。
45.参见图8,所述驱动模块5包括第一驱动电机51和齿轮传动机构52,第一驱动电机51安装于支撑套11上,第一驱动电机51和固定套12之间通过齿轮传动机构52实现传动连接,所述齿轮传动机构52包括齿轮53和外齿圈54,齿轮53固定于第一驱动电机51的输出轴上,外齿圈54和齿轮53啮合,外齿圈54套设并固定于固定套12上。
46.综上所述,本发明使用方法如下:
47.步骤一:将超声探头安装于主体件上,随后移动超声探头并改变超声探头的角度,直至超声图像符合穿刺间隙及穿刺点及穿刺角度要求,此时超声探头的中轴线即为穿刺角
度,超声探头的下端中点即为穿刺点;
48.步骤二:通过驱动模块驱动支撑套相对固定套转动,从而实现三个支撑脚相对超声探头进行转动,使得三个支撑脚能够根据超声探头的倾斜角度和倾斜方向进行调整,即三个支撑脚的展开长度能够满足对超声探头进行三点支撑固定的需求,如图9所示;
49.步骤三:通过三个驱动单元分别驱动三个支撑脚分阶段展开;
50.(1)当通过第二驱动电机驱动第一滑块竖直向下移动,使得第一滑块经第一连杆来驱动第一活动杆的另一端绕第一活动杆和主体件之间的铰接位置转动,从而第一活动杆和主体件之间的夹角逐渐扩大,如图10、图11所示;
51.(2)当第一活动杆和主体件之间的夹角达到特定角度后,第二滑块和限位块之间脱离,此时第一活动杆和第二活动杆之间解除锁住状态,第二滑块在拉簧的作用下从第一活动杆的一端向其另一端直线移动,使得第二滑块经第二连杆来驱动第二活动杆的另一端绕第二活动杆和第一活动杆之间的铰接位置转动,从而第一活动杆和第二活动杆之间的夹角逐渐扩大至最大,此时第一活动杆和第二活动杆完全展开,拉簧处于未拉伸状态,如图11所示;
52.(3)在第一滑块继续竖直向下移动的过程中,第一活动杆和主体件之间的夹角继续逐渐扩大,如图11、图12所示,直至支撑块底面与皮肤完全接触,此时驱动单元停止驱动;
53.步骤四:根据主体件上三个支撑脚的标记来对三个支撑脚抵住皮肤的位置标记不同的符号,例如数字符号(1、2、3)、字母符号(a、b、c)等,如图9所示,由于第二驱动电机对第一滑块的移动限制和拉簧对第二滑块的移动限制,使得支撑脚展开后能够保持不变,从而通过三个符号标记的位置和三个保持不变的支撑脚对应配合就能保障后续主体件上安装的麻醉针能够与超声探头保持同样的倾斜角度和倾斜方向;
54.步骤五:将超声探头从主体件上取下并安装上导针套和麻醉针,随后通过三个支撑脚重新接触与其相对应的符号标记位置,使得麻醉针沿主体件的轴向直线推入时,麻醉针的针尖能够从由超声探头确定的穿刺点和穿刺角度刺入,从而减小麻醉针实际操作和超声图像判断之间的误差。
55.本说明书中所描述的以上内容仅仅是对本发明所作的举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明说明书的内容或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1