一种移乘护理装置
1.本发明涉及医疗器械技术领域,具体涉及一种移乘护理装置。
背景技术:
2.现有技术中存在的移乘护理装置,其底盘采用麦克纳姆轮或全向轮作为机器人的车轮,其结构复杂,承重能力较差并且对地面的平整度要求较高,且大多数没有可活动的万向轮结构,整体稳定性和灵活性较差。其腰部只能实现单自由度的俯仰运动,结构简单,安全性和稳定性较差。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供的一种移乘护理装置解决了以下问题:
4.1、现有移乘护理装置底部采用麦克纳姆轮或全向轮存在结构复杂,承重能力较差、稳定性和灵活性差的问题;
5.2、现有移乘护理装置的腰部存在只能实现单自由度的俯仰运动的问题;
6.3、现有移乘护理装置的腰部存在安全性和稳定性较差的问题。
7.为了达到上述发明目的,本发明采用的技术方案为:一种移乘护理装置,包括:机器人躯干、俯仰单元、侧弯单元、底部支架和轮子;
8.所述机器人躯干与俯仰单元固定连接;所述俯仰单元与侧弯单元连接;所述侧弯单元与底部支架固定连接;所述底部支架通过减震模块和万向轮驱动模块与轮子连接。
9.进一步地,所述俯仰单元包括:俯仰架、俯仰驱动模块和第一法兰;
10.所述第一法兰与俯仰架固定连接;所述俯仰驱动模块的传动轴与第一法兰固定连接,带动第一法兰和俯仰架的旋转。
11.进一步地,所述俯仰架包括:支撑板、第一支撑侧架和第二支撑侧架;
12.所述支撑板与机器人躯干固定连接;所述第一支撑侧架的一端与支撑板的一端固定连接;所述第二支撑侧架的一端与支撑板的一端固定连接;所述第一支撑侧架的另一端设定辅助转动部;所述第二支撑侧架的另一端设有法兰固定部。
13.进一步地,所述侧弯单元包括:侧弯架、第一固定架、第二固定架、侧弯驱动模块、第一齿轮、第二齿轮、第二法兰、第三法兰和传动杆;
14.所述侧弯架分别与第一固定架和第二固定架活动连接;所述侧弯驱动模块通过第二法兰与第一齿轮固定连接;所述传动杆的一端与侧弯架固定连接,其另一端分别与第二齿轮和第三法兰固定连接;所述第三法兰分别与第二齿轮和侧弯架固定连接;所述第一齿轮与第二齿轮啮合。
15.上述进一步方案的有益效果为:本发明通过侧弯驱动模块驱动第一齿轮,带动第二齿轮,从而带动与传动杆和侧弯架旋转。
16.进一步地,所述侧弯架包括:第一侧弯上支撑架、第二侧弯上支撑架、第一侧弯下支撑架、第二侧弯下支撑架、限位架、限位柱和连接块;
17.所述第一侧弯上支撑架的一端通过一侧的连接块与第二侧弯上支撑架的一端固定连接;所述第一侧弯上支撑架的另一端通过另一侧的连接块与第二侧弯上支撑架的另一端固定连接;所述第一侧弯下支撑架的一端与一侧的连接块固定连接;所述第二侧弯下支撑架的一端与另一侧的连接块固定连接;所述第一侧弯下支撑架的另一端和第二侧弯下支撑架的另一端均设有限位柱;所述限位架的一端与一侧的连接块固定连接,其另一端与另一侧的连接块固定连接;所述第一侧弯上支撑架和第二侧弯上支撑架间固定有俯仰单元的俯仰驱动模块,并与俯仰驱动模块的壳体固定连接;所述第一支撑侧架的另一端伸入限位架与第一侧弯上支撑架构成的空间中,其辅助转动部伸入第一侧弯上支撑架,并与第一侧弯上支撑架转动连接。
18.进一步地,所述第一固定架上设有第一限位区,所述第二固定架上设有第二限位区;
19.所述第一限位区用于插入第一侧弯下支撑架的限位柱;所述第二限位区用于插入第二侧弯下支撑架的限位柱;所述第一固定架与第一侧弯下支撑架转动连接;所述第二固定架与第二侧弯下支撑架转动连接。
20.上述进一步方案的有益效果为:侧弯架的限位架可以限制俯仰单元旋转范围,限位柱可以限制侧弯单元的旋转范围。
21.进一步地,所述底部支架包括:上底板、下底板和底板支撑架;
22.所述上底板分别与第一固定架和第二固定架固定连接;
23.所述底板支撑架的一端与上底板固定连接,其另一端与下底板固定连接。
24.进一步地,所述轮子包括驱动轮和万向轮;
25.所述驱动轮包括:驱动轮驱动单元和真空胎;
26.所述驱动轮驱动单元嵌入真空胎内,与真空胎固定连接。
27.上述进一步方案的有益效果为:本发明采用驱动轮驱动单元与真空胎结合的方式,其结构简单,运动控制方便,灵活性高,承重能力高。并配有万向轮,进一步提高装置结构的稳定和强度。
28.进一步地,所述驱动轮侧设有减震模块,所述减震模块包括:阻尼弹簧减震器和l型固定板;
29.所述l型固定板与驱动轮固定连接,并与阻尼弹簧减震器固定连接;所述阻尼弹簧减震器包括:减震下固定板、减震上固定板、第一限位块、第二限位块、第三限位块、螺柱和弹簧;所述减震下固定板的一面与l型固定板固定连接,其另一面与第一限位块和弹簧的一端固定连接;所述减震上固定板的一面分别与弹簧的另一端、第二限位块和第三限位块固定连接,其另一面与螺柱固定连接;所述螺柱将减震上固定板与底部支架固定;所述第一限位块将弹簧包围;所述第二限位块和第三限位块分布在第一限位块和弹簧间。
30.上述进一步方案的有益效果为:驱动轮在越障时,障碍物会给驱动轮一个向上的力,减震下固定板将这个向上的力传递给弹簧,同时减震下固定板会向上移动一段距离,弹簧被压缩,会给驱动轮施加一个反作用力,向下压驱动轮,从而起到一个降低底盘高度的效果,实现减震。本发明为每个驱动轮配有阻尼弹簧减震器,提高了机器人在进行抱人及抱人平移过程中的安全性,也增加了机器人整体在不平路面的稳定性。
31.进一步地,所述万向轮上设有万向轮驱动模块,万向轮驱动模块包括:万向轮连
杆、滑块、滑轨、万向轮电机、第三齿轮、第一短驱动杆、第二短驱动杆、第一长驱动杆、第二长驱动杆和传动轴;
32.所述万向轮连杆的一端与万向轮固定连接,其另一端与滑块的底部固定连接;所述滑块与滑轨滑动连接,所述滑轨固定在底部支架上;所述万向轮电机和第三齿轮均固定在底部支架上;所述万向轮电机的齿轮与第三齿轮啮合;所述传动轴穿过第三齿轮,并与第三齿轮固定连接,其一端与第一短驱动杆的一端固定连接,其另一端与第二短驱动杆的一端固定连接;所述第一长驱动杆的一端与第一短驱动杆的另一端转动连接,其另一端与万向轮连杆固定连接;所述第二长驱动杆的一端与第二短驱动杆的另一端转动连接,其另一端与万向轮连杆固定连接。
33.上述进一步方案的有益效果为:在万向轮电机驱动传动轴转动时,带动第一短驱动杆和第二短驱动杆转动,使得第一长驱动杆和第二长驱动杆对万向轮连杆施加推力,从而使得万向轮前进。装置在抱起人的时候,装置上半身的重心向前移动,通过滑块在滑轨上的移动,使得装置重心稳定,从而提高装置的安全性和稳定性;同时在行驶过程中,通过滑块在滑轨上的来回移动,可以使得装置重心稳定。
34.综上,本发明的有益效果为:
35.1、本发明采用驱动轮驱动单元与真空胎结合的方式,其结构简单,运动控制方便,灵活性高,承重能力高。并配有万向轮,进一步提高装置结构的稳定和强度。
36.2、本发明具有可以自由伸缩的轮式驱动模块,增加了底盘的受力面积,进一步提高了机身结构的稳定性和安全性,同时我们在每个轮子的结构设计中加入了独立的减震单元,滤除了地面不平整带来的冲击震动,提高了移乘护理装置在进行抱人及抱人平移过程中的舒适性,也增加了机器人整体在不平路面的稳定性。
37.3、本发明的装置腰部采用双自由度的结构形式,在腰部侧弯及俯仰结构中,增加了侧弯限位机构和俯仰限位机构,增加了安全性和稳定性。同时驱动单元采用带抱闸的伺服电机,提高了移乘护理机器人在抱人过程中遇到掉电等紧急情况时的安全性和稳定性。
附图说明
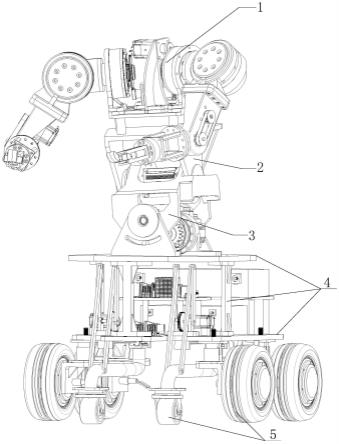
38.图1为一种移乘护理装置的整体结构示意图;
39.图2为俯仰单元的结构示意图;
40.图3为俯仰架的结构示意图;
41.图4为侧弯单元的正面结构示意图;
42.图5为侧弯单元的背面结构示意图;
43.图6为侧弯架的结构示意图;
44.图7为底部支架的结构示意图;
45.图8为减震模块的结构示意图;
46.图9为阻尼弹簧减震器的结构示意图;
47.图10为万向轮驱动模块的结构示意图;
48.其中,1、机器人躯干;2、俯仰单元;3、侧弯单元;4、底部支架;5、轮子;21、俯仰架;22、俯仰驱动模块;23、第一法兰;211、支撑板;212、第一支撑侧架;213、第二支撑侧架;31、侧弯架;32、第一固定架;33、第二固定架;34、侧弯驱动模块;35、第一齿轮;36、第二齿轮;
37、第二法兰;38、第三法兰;39、传动杆;311、第一侧弯上支撑架;312、第二侧弯上支撑架;313、第一侧弯下支撑架;314、第二侧弯下支撑架;315、限位架;316、限位柱;317、连接块;321、第一限位区;331、第二限位区;41、上底板;42、下底板;43、底板支撑架;44、电池固定架;45、驱动模块固定架;46、驱动器固定架;47、轮子电机固定架;48、齿轮固定架;51、驱动轮;52、万向轮;551、驱动轮驱动单元;552、真空胎;61、阻尼弹簧减震器;62、l型固定板;611、减震下固定板;612、减震上固定板;613、第一限位块;614、第二限位块;615、第三限位块;616、螺柱;617、弹簧;71、万向轮连杆;72、滑块;73、滑轨;74、万向轮电机;75、第三齿轮;76、第一短驱动杆;77、第二短驱动杆;78、第一长驱动杆;79、第二长驱动杆;80、传动轴;2121、辅助转动部;2131、法兰固定部。
具体实施方式
49.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
50.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的各个实施例及实施例中的各个特征可以相互组合。
51.如图1所示,一种移乘护理装置,包括:机器人躯干1、俯仰单元2、侧弯单元3、底部支架4和轮子5;
52.所述机器人躯干1与俯仰单元2固定连接;所述俯仰单元2与侧弯单元3连接;所述侧弯单元3与底部支架4固定连接;所述底部支架4通过减震模块和万向轮驱动模块与轮子5连接。
53.如图2所示,所述俯仰单元2包括:俯仰架21、俯仰驱动模块22和第一法兰23;
54.所述第一法兰23与俯仰架21固定连接;所述俯仰驱动模块22的传动轴与第一法兰23固定连接,带动第一法兰23和俯仰架21的旋转。
55.如图3所示,所述俯仰架21包括:支撑板211、第一支撑侧架212和第二支撑侧架213;
56.所述支撑板211与机器人躯干1固定连接;所述第一支撑侧架212的一端与支撑板211的一端固定连接;所述第二支撑侧架213的一端与支撑板211的一端固定连接;所述第一支撑侧架212的另一端设定辅助转动部2121;所述第二支撑侧架213的另一端设有法兰固定部2131。
57.如图4~5所示,所述侧弯单元3包括:侧弯架31、第一固定架32、第二固定架33、侧弯驱动模块34、第一齿轮35、第二齿轮36、第二法兰37、第三法兰38和传动杆39;
58.所述侧弯架31分别与第一固定架32和第二固定架33活动连接;所述侧弯驱动模块34通过第二法兰37与第一齿轮35固定连接;所述传动杆39的一端与侧弯架31固定连接,其另一端分别与第二齿轮36和第三法兰38固定连接;所述第三法兰38分别与第二齿轮36和侧弯架31固定连接;所述第一齿轮35与第二齿轮36啮合。
59.在本实施例中,俯仰驱动模块22和侧弯驱动模块34为减速器、扭矩传感器、编码器、抱闸伺服交流电机于一体的一体机。可实现精确的位置控制和速度控制,且可以实现不
同的扭矩输出,从而具有不同负载能力,再通过俯仰单元2和侧弯单元3结构的配合,可实现装置侧弯和俯仰运动,同时提高了装置在掉电等异常情况下的安全性和稳定性。
60.本发明通过侧弯驱动模块34驱动第一齿轮35,带动第二齿轮36,从而带动与传动杆39和侧弯架31旋转。
61.如图6所示,所述侧弯架31包括:第一侧弯上支撑架311、第二侧弯上支撑架312、第一侧弯下支撑架313、第二侧弯下支撑架314、限位架315、限位柱316和连接块317;
62.所述第一侧弯上支撑架311的一端通过一侧的连接块317与第二侧弯上支撑架312的一端固定连接;所述第一侧弯上支撑架311的另一端通过另一侧的连接块317与第二侧弯上支撑架312的另一端固定连接;所述第一侧弯下支撑架313的一端与一侧的连接块317固定连接;所述第二侧弯下支撑架314的一端与另一侧的连接块317固定连接;所述第一侧弯下支撑架313的另一端和第二侧弯下支撑架314的另一端均设有限位柱316;所述限位架315的一端与一侧的连接块317固定连接,其另一端与另一侧的连接块317固定连接;所述第一侧弯上支撑架311和第二侧弯上支撑架312间固定有俯仰单元2的俯仰驱动模块22,并与俯仰驱动模块22的壳体固定连接;所述第一支撑侧架212的另一端伸入限位架315与第一侧弯上支撑架311构成的空间中,其辅助转动部2121伸入第一侧弯上支撑架311,并与第一侧弯上支撑架311转动连接。
63.所述第一固定架32上设有第一限位区321,所述第二固定架33上设有第二限位区331;
64.所述第一限位区321用于插入第一侧弯下支撑架313的限位柱316;所述第二限位区331用于插入第二侧弯下支撑架314的限位柱316;所述第一固定架32与第一侧弯下支撑架313转动连接;所述第二固定架33与第二侧弯下支撑架314转动连接。
65.在本实施例中,第一固定架32和第二固定架33分别与侧弯架31连接时,可采用轴承,便于侧弯架31旋转。
66.侧弯架31的限位架315可以限制俯仰单元2旋转范围,限位柱316可以限制侧弯单元3的旋转范围。
67.如图7所示,所述底部支架4包括:上底板41、下底板42和底板支撑架43;
68.所述上底板41分别与第一固定架32和第二固定架33固定连接;
69.所述底板支撑架43的一端与上底板41固定连接,其另一端与下底板42固定连接。
70.所述下底板42的上表面还固定有电池固定架44、驱动模块固定架45、两个轮子电机固定架47和两套齿轮固定架48,其下表面固定有两个驱动器固定架46。
71.电池固定架44用于固定本装置的电池,电池固定安装在下底板42上,作为装置底盘的能量,同时也作为防止装置工作时倾倒而所压重物。在选择时采用循环寿命长,内阻小,安全性好和供电时间长的电池。
72.驱动模块固定架45用于固定整体控制驱动模块,整体控制驱动模块包括:处理器、驱动器及i/o模块组成,具有同步控制功能,对万向轮电机74、驱动轮驱动单元551、俯仰驱动模块22和侧弯驱动模块34进行同步控制。
73.所述轮子5包括驱动轮51和万向轮52;所述驱动轮51包括:驱动轮驱动单元551和真空胎552;所述驱动轮驱动单元551嵌入真空胎552内,与真空胎552固定连接。
74.本发明采用驱动轮驱动单元551与真空胎552结合的方式,其结构简单,运动控制
方便,灵活性高,承重能力高。并配有万向轮52,进一步提高装置结构的稳定和强度。
75.在本实施例中驱动轮驱动单元551采用直流伺服轮毂电机。
76.所述驱动轮51侧设有减震模块,如图8~9所示,所述减震模块包括:阻尼弹簧减震器61和l型固定板62;
77.所述l型固定板62与驱动轮51固定连接,并与阻尼弹簧减震器61固定连接;所述阻尼弹簧减震器61包括:减震下固定板611、减震上固定板612、第一限位块613、第二限位块614、第三限位块615、螺柱616和弹簧617;所述减震下固定板611的一面与l型固定板62固定连接,其另一面与第一限位块613和弹簧617的一端固定连接;所述减震上固定板612的一面分别与弹簧617的另一端、第二限位块614和第三限位块615固定连接,其另一面与螺柱616固定连接;所述螺柱616将减震上固定板612与底部支架4固定;所述第一限位块613将弹簧617包围;所述第二限位块614和第三限位块615分布在第一限位块613和弹簧617间。
78.在本实施例中,螺柱616将减震上固定板612和下底板42固定。
79.驱动轮51在越障时,障碍物会给驱动轮51一个向上的力,减震下固定板611将这个向上的力传递给弹簧617,同时减震下固定板611会向上移动一段距离,弹簧617被压缩,会给驱动轮51施加一个反作用力,向下压驱动轮51,从而起到一个降低底盘高度的效果,实现减震。本发明为每个驱动轮51配有阻尼弹簧减震器61,提高了本装置在进行抱人及抱人平移过程中的安全性,也增加了本装置整体在不平路面的稳定性。
80.所述万向轮52上设有万向轮驱动模块,如图10所示,万向轮驱动模块包括:万向轮连杆71、滑块72、滑轨73、万向轮电机74、第三齿轮75、第一短驱动杆76、第二短驱动杆77、第一长驱动杆78、第二长驱动杆79和传动轴80;
81.所述万向轮连杆71的一端与万向轮52固定连接,其另一端与滑块72的底部固定连接;所述滑块72与滑轨73滑动连接,所述滑轨73固定在底部支架4上;所述万向轮电机74和第三齿轮75均固定在底部支架4上;所述万向轮电机74的齿轮与第三齿轮75啮合;所述传动轴80穿过第三齿轮75,并与第三齿轮75固定连接,其一端与第一短驱动杆76的一端固定连接,其另一端与第二短驱动杆77的一端固定连接;所述第一长驱动杆78的一端与第一短驱动杆76的另一端转动连接,其另一端与万向轮连杆71固定连接;所述第二长驱动杆79的一端与第二短驱动杆77的另一端转动连接,其另一端与万向轮连杆71固定连接。
82.在万向轮电机74驱动传动轴80转动时,带动第一短驱动杆76和第二短驱动杆77转动,使得第一长驱动杆78和第二长驱动杆79对万向轮连杆71施加推力,从而使得万向轮52前进。本装置在抱起人的时候,装置上半身的重心向前移动,通过滑块72在滑轨73上的移动,使得装置重心稳定,从而提高装置的安全性和稳定性;同时在行驶过程中,通过滑块72在滑轨73上的来回移动,可以使得装置重心稳定。
83.在本实施例中,万向轮电机74采用抱闸伺服交流电机,安装在轮子电机固定架47上。齿轮固定架48用于放置第三齿轮75,通过齿轮固定架48放置第三齿轮75时,可在齿轮固定架48的两侧放置轴承,将传动轴80插入轴承中,实现第三齿轮75的放置。驱动器固定架46用于放置万向轮电机74的驱动器,一个万向轮电机74配置一个驱动器。
84.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个
元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
85.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
86.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其它的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1