一种基于多模融合的人体运动信息传感检测系统及方法
1.本发明涉及运动识别技术领域,更具体的说是涉及一种基于多模融合的人体运动信息传感检测系统及方法。
背景技术:
2.目前,随着可穿戴传感技术和运动医学的发展,人体运动信息的实时采集和分析在生活中的应用越来越广泛。人体运动信息传感系统在人机交互、运动康复、运动模式识别、可穿戴外骨骼等领域具有重要地位。
3.但是,按照采集信息的不同,人体运动信息传感系统可以分为以下几类:(1)基于光学或视频信号的人体运动信息传感系统。(2)基于惯性传感器的人体运动信息传感系统。(3)基于肌电信号的人体运动信息采集系统。(4)基于柔性应变传感器的人体运动信息采集系统。然而,这几类传感系统都存在一些问题。光学系统需要多个固定位置的镜头捕捉信号,无法满足便携性,且光学系统容易受到环境干扰。惯性传感器可以采集倾角、速度、加速度等信息,但是采集的信息会有滞后,导致系统的实时性受到影响,同时惯性传感器为刚性结构,会影响关节附近的穿戴舒适度。肌电传感器采集生物电信号,因为生物电信号微弱,易受到噪声干扰,对电路的要求非常高。应变传感器主要有电阻式、电容式和压电式传感器,随着柔性技术的发展,应变传感器都往柔性、人机友好的方向发展,但是柔性应变传感器无法同时捕捉动态和静态的运动信息。
4.因此,如何提供一种能够解决上述问题的人体运动信息传感检测系统是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种基于多模融合的人体运动信息传感检测系统及方法,具有多类运动信息获取、多种模式的传感数据融合、无线传输功能等功能。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种基于多模融合的人体运动信息传感检测系统,包括:
8.主控制器,用于实现采样数据的预处理及融合;
9.惯性检测单元,所述惯性检测单元与所述主控制器电性连接,用于检测用户运动中的加速度信息;
10.压力检测单元,所述压力检测单元与所述主控制器电性连接,用于检测用户运动中的压力信息;
11.应变检测单元,所述应变检测单元与所述主控制器电性连接,用于检测用户运动中各个关节的角度信息。
12.优选的,所述惯性检测单元包括:三轴加速度计以及陀螺仪。
13.优选的,还包括:无线传输模块,所述无线传输模块与所述主控制器无线通讯连接,用于将所述主控制器得到的融合结果进行无线传输。
14.优选的,还包括:上位机,所述上位机与所述无线传输模块无线通讯连接,用于接收所述融合结果。
15.优选的,还包括:多通道信号采集电路,所述多通道信号采集电路的输入端与所述惯性检测单元、所述压力检测单元及所述应变检测单元电性连接,输出端与所述主控制器电性连接。
16.优选的,还包括:电源模块,所述电源模块与所述主控制器、所述无线传输模块及所述多通道信号采集电路电性连接,用于实现供电。
17.进一步,本发明还提供一种利用上述任一项所述的一种基于多模融合的人体运动信息传感检测系统的检测方法,包括以下步骤:
18.s1:利用所述惯性检测单元、所述压力检测单元及所述应变检测单元实时检测用户运动中的加速度信息、压力信息及角度信息,并通过所述多通道信号采集电路发送至所述主控制器;
19.s2:所述主控制器对所述加速度信息、所述压力信息及所述角度信息进行融合处理,并通过所述无线传输模块发送至所述上位机。
20.优选的,所述s2中,所述主控制器对所述加速度信息、所述压力信息及所述角度信息进行融合处理的具体过程包括:
21.将所述三轴加速度计及所述陀螺仪采集的数据进行互补融合,得到姿态向量;
22.将所述角度信息及所述压力信息进行归一化处理,得到对应的角度归一化向量及压力归一化向量;
23.将所述角度归一化向量、所述压力归一化向量及所述姿态向量进行拼接融合,得到融合结果。
24.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于多模融合的人体运动信息传感检测系统及方法,具有多类运动信息获取、多种模式的传感数据融合、无线传输功能和数据实时显示等功能的系统。弥补了国内外在便携式的基于多模融合的人体运动信息传感系统领域的空白。该系统成本低,穿戴舒适度高,安装操作简便可靠,在各种环境中都可以实时捕捉和显示人体运动的各类信息,在运动康复、可穿戴外骨骼、人体运动模式识别等领域具有很高的应用价值。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
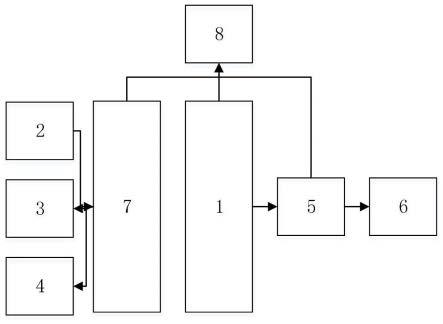
26.图1为本发明提供的一种基于多模融合的人体运动信息传感检测系统的结构原理框图;
27.图2为本发明实施例提供的主控制器的电路原理图;
28.图3为本发明实施例提供的多通道信号采集电路的电路原理图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.参见附图1所示,本发明实施例公开了一种基于多模融合的人体运动信息传感检测系统,包括:
31.主控制器1,用于实现采样数据的预处理及融合;
32.惯性检测单元2,惯性检测单元2与主控制器1电性连接,用于检测用户运动中的加速度信息,惯性传感单元2可以安装在躯干部位,采集三轴加速度、三轴角速度和三轴地磁数据;
33.压力检测单元3,压力检测单元3与主控制器1电性连接,用于检测用户运动中的压力信息,压力检测单元3可以安装在脚底或假肢接受腔内,获取运动中的压力信息;
34.应变检测单元4,应变检测单元4与主控制器1电性连接,用于检测用户运动中各个关节的角度信息,应变检测单元4可以安装在用户待测各关节处,采集各关节运动中的角度信息,且应变检测单元4可以选用电容式柔性应变传感器。
35.具体的,主控制器1的电路原理图参见附图2所示,包括主控单元、稳压单元及复位单元,其中稳压单元、复位单元均与主控单元连接;
36.主控单元包括芯片u2及多个电路元器件,其中电容cx1与电容cx2串联,电容cx1与电容cx2的一端接地,另一端与晶振x1并联,且晶振x1与电阻rx1并联,电阻rx1的一端与芯片u2的引脚5连接,电阻rx1的另一端与芯片u2的引脚6连接,芯片u2的引脚12接地,芯片u2的引脚64接3.3v;
37.稳压单元包括芯片u7及多个电路元器件,其中芯片u7的引脚1接地,芯片u7的引脚2接电容c72的一端以及3.3v,电容c72的另一端接地,电容c72与电容c24并联且电容c24与电容c28并联;
38.复位单元包括多个电路元器件,其中电阻r3的一端接3.3v,另一端与电容c19的一端及按键kr的引脚1连接,电容c19的另一端与按键kr的引脚2连接且接地;
39.主控制器1采用stm32f103系列单片机,其内核是armcortex-m3,主频最高72mhz,最多有10路i/o复用ad转换通道,转换精度为12bit,最高采样率1mhz。使用dc-dc转换芯片lm1117提供3.3v恒定的dc电压,并在外围设计了硬件复位电路,stm32f103芯片对各类采样数据进行数据预处理得到有效数据。
40.在一个具体的实施例中,惯性检测单元2包括:三轴加速度计以及陀螺仪。
41.在一个具体的实施例中,还包括:无线传输模块5,无线传输模块5与主控制器1无线通讯连接,用于将主控制器1得到的融合结果进行无线传输。
42.在一个具体的实施例中,还包括:上位机6,上位机6与无线传输模块5无线通讯连接,用于接收融合结果。
43.在一个具体的实施例中,还包括:多通道信号采集电路7,多通道信号采集电路7的输入端与惯性检测单元2、压力检测单元3及应变检测单元4电性连接,输出端与主控制器1电性连接。
44.具体的,多通道信号采集电路7的电路原理图参见附图3所示,包括芯片u1及多个电路元器件,其中电容c3及电容c4并联且电容c3的一端接地,电容c3的另一端与电容c4的一端与芯片u1的引脚1连接,芯片u1的引脚6接3.3v电压,电容c9及电容c10并联且电容c9的一端接地,电容c9的另一端与电容c10的一端与芯片u1的引脚10连接,电阻r1的一端与芯片u1的引脚17连接,另一端与芯片u1的引脚18连接,电容c1与电容c2并联且电容c1的一端及电容c2的一端与电阻rc1的一端、电阻rc2的一端连接且接地,电阻rc1的另一端、电阻rc2的另一端均与芯片u1的引脚26连接,芯片u1的引脚33接地;
45.电容c5与电容c6并联且电容c5的一端及电容c6的一端接地,电容c5的另一端及电容c6的另一端接3.3v,电容c7与电容c8并联且电容c7的一端及电容c8的一端接地,电容c7的另一端及电容c8的另一端接3.3v;
46.接口p1的引脚1、引脚3、引脚5、引脚7、引脚9及引脚11对应与芯片u1的引脚27-引脚32连接,电容c46的一端与接口p1的引脚1连接,电容c46的另一端与接口p1的引脚2连接,且接口p1的引脚2、引脚4、引脚6、引脚8、引脚10、引脚12、引脚14及引脚16均接地;
47.接口p2的引脚1、引脚2、引脚3、引脚4对应连接芯片u1的引脚4、引脚7-9。
48.由于传统的电容采集电路无法测量微小电容,而电容式柔性应变传感器的电容值为pf量级,故采用1ad芯片实现高精度pf级电容测量。1为带有单片机处理单元的一款专门进行电容测量的电容数字转换单芯片方案,其前端转换单元是基于acam公司专利的测量原理,这种转换测量原理提供了对于转换时间范围最小可以到2μs的高精度时间转换。pcap01ad芯片测量的放电时间是与传感器和参考电容值成比率关系的:cn/cref=τn/τref,它在接地模式下可以测量8路电容,漂移模式下可以测量4路电容,为实现更多路的测量,此处采用接地模式。使用pcap01ad芯片实现多通道采集电容式柔性应变传感器的电容数据,并通过spi协议发送给主控制器。其中pcap01ad芯片参考电容选用误差为0.1%的100pf高精度电容,主控制器通过spi协议给芯片初始化。
49.在一个具体的实施例中,还包括:电源模块8,电源模块8与主控制器1、无线传输模块5及多通道信号采集电路7电性连接,用于实现供电。
50.进一步,本发明实施例还提供一种利用上述任一项的一种基于多模融合的人体运动信息传感检测系统的检测方法,包括以下步骤:
51.s1:利用惯性检测单元2、压力检测单元3及应变检测单元4实时检测用户运动中的加速度信息、压力信息及角度信息,并通过多通道信号采集电路7发送至主控制器1;
52.s2:主控制器1对加速度信息、压力信息及角度信息进行融合处理,并通过无线传输模块5发送至上位机6,上位机6由实时显示界面和数据记录单元组成,实现对人体运动信息传感数据的实时显示,同时将多模融合的数据进行存储,对后期分析具有重要意义。
53.在一个具体的实施例中,s2中,主控制器1对加速度信息、压力信息及角度信息进行融合处理的具体过程包括:
54.将三轴加速度计及陀螺仪采集的数据进行互补融合,得到姿态向量;
55.将角度信息及压力信息进行归一化处理,得到对应的角度归一化向量及压力归一化向量;
56.将角度归一化向量、压力归一化向量及姿态向量进行拼接融合,得到融合结果。
57.具体的,(1)融合imu数据:
58.惯性检测单元2找那个的三轴加速度计采集的加速度数据可以解算为角度roll
acc
,pitch
acc
,陀螺仪采集的角速度数据可以积分得到角度roll
gyro
,pitch
gyro
,yaw
gyro
,加速度仅在静止时刻可以得到较准确的姿态,而陀螺仪仅对转动时的姿态变化敏感,且陀螺仪若本身存在误差,则经过连续的时间积分,误差会不断增大,因此需要结合两者计算的姿态,进行互补融合,具体过程如下:
59.roll=roll
gyro
+(roll
acc-roll
gyro
)*k
60.pitch=pitch
gyro
+(pitch
acc-pitch
gyro
)*k
61.yaw=yaw
gyro
62.式中,k为比例系数,roll为横滚角,pitch为俯仰角,yaw为偏航角。
63.imu在t时刻融合后的姿态向量为x
t
=[roll,pitch,yaw]
t
[0064]
(2)归一化电容数据:
[0065]
第j个电容式柔性应变传感器t时刻的电容值为c
jt
,电容初始值为c0,第j个电容式柔性应变传感器t时刻变化量的归一化值为y
j,t
=(c
j,t-c0)/c0,归一化向量y
t
=[y
1,t
,y
2,t
,
…
,y
n,t
]
t
,j=1,2,
…
,n,n为电容式柔性应变传感器的数量。同理,第k个高灵敏度压力传感器t时刻的电容值为c
k,t
,电容初始值为c0,第k个高灵敏度压力传感器t时刻变化量的归一化值为z
j,t
=(c
k,t-c0)/c0,归一化向量z
t
=[z
1,t
,z
2,t
,
…
,z
m,t
]
t
,k=1,2,
…
,m,m为高灵敏度压力传感器的数量。
[0066]
(3)将三类传感器数据向量拼接融合:
[0067]
t时刻的数据帧df
t
=[x
t
,y
t
,z
t
],将融合后的数据帧打包发送给上位机。
[0068]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0069]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1