一种智能免充气腔镜辅助建腔装置
1.本技术涉及手术建腔设备领域,具体而言,涉及一种智能免充气腔镜辅助建腔装置。
背景技术:
2.腹腔镜手术是一门新发展起来的微创方法,是未来手术方法发展的一个必然趋势,由于技术的进步,使通过更小的切口来实施手术成为可能。
3.目前,公告号为cn207306690u的中国专利公开了一种手术拉钩万向调节装置,包括支撑杆与夹持座,夹持座套设于支撑杆外周并通过锁紧丝杆与支撑杆形成配合,夹持座上还设有与手术床形成配合的夹持槽;所述支撑杆顶端通过第一万向节连接有调节杆,调节杆的另一端较接有操控杆,操控杆与调节杆的接处设有锁紧螺栓,操控杆的另一端通过第二万向节连接有拉钩固定夹具,采用的是简易的机械杆支撑,需要在使用时,通过手动的将简易的机械杆进行调整拉钩的位置,并且拉钩牵引装置仅设置有一个拉钩件,将切开的皮肤的上部拉住,而对于切开皮肤的其它两侧的皮肤,还是需要通过医护人员手持拉钩进行将皮肤拉住,而采用简易的机械杆的设置,使得其智能化程度不高,因此不管是手动调节简易的机械杆,还是医护人员手持拉钩将切开皮肤另外两侧拉住,都给拉钩牵引装置的使用带来了不便。
技术实现要素:
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种基于腔镜手术的半自主手术辅助智能机械臂,可以实现将第一牵引钩设置在第一六轴机械臂的一侧,将一个第二牵引钩设置在第二六轴机械臂一侧,将另一个第二牵引钩设置在第三六轴机械臂的一侧,第一六轴机械臂、第二六轴机械臂和第三六轴机械臂的调节更加的方便和快捷,并且利用机械臂代替传统的机械杆式的牵引机构,实现设备的智能化调节,而第一牵引钩实施对切开的皮肤的上部的拉住,两个第二牵引钩将切开的皮肤的另外两侧拉住,从而减少了医护人员手持拉钩实施牵引的工作量,降低人力成本,因此给拉钩牵引装置的使用带来的便利。
5.根据本技术实施例的一种智能免充气腔镜辅助建腔装置,包括:病床、第二移动车体、第一牵引组件和第二牵引组件,所述病床底部设置有第一移动车体,所述第一移动车体底部设置有第一吸附件;所述第二移动车体底部设置有第二吸附件;所述第一牵引组件包括立杆、第一六轴机械臂和第一牵引钩,所述立杆底部与所述第二移动车体上部固定连接,所述第一六轴机械臂一侧设置在所述立杆上部,所述第一六轴机械臂另一侧与所述第一牵引钩固定连接;所述第二牵引组件包括第一支撑板、第二支撑板、第二六轴机械臂、第三六轴机械臂和第二牵引钩,所述第一支撑板和所述第二支撑板对称设置在所述立杆两侧,所述第二六轴机械臂一侧设置在所述第一支撑板远离所述立杆一侧,所述第二六轴机械臂另一侧与一个所述第二牵引钩固定连接,所述第三六轴机械臂一侧设置在所述第二支撑板远
离所述立杆一侧,所述第三六轴机械臂另一侧与另一个所述第二牵引钩固定连接。
6.根据本技术实施例的一种智能免充气腔镜辅助建腔装置,病床的使用下,便于病人躺在病床的上部,并且第一吸附件的使用下,便于对病床的固定,有效的防止病床滑动,利用第二移动车体将牵引装置移动到病床一侧,第二吸附件将第二移动车体进行固定和限位,立杆实施对第一六轴机械臂进行支撑,第一六轴机械臂的伸展,将第一牵引钩伸展到手术位置,第一牵引钩实施对切开皮肤的上部的拉住,第一支撑板实施对第二六轴机械臂的支撑,第二六轴机械臂的伸展,将一个第二牵引钩伸展到手术位置,第二牵引钩实施对切开皮肤的一侧拉住,第二支撑板实施对第三六轴机械臂的支撑,第三六轴机械臂的伸展,将另一个第二牵引钩伸展到手术位置,第二牵引钩实施对切口皮肤的另一侧拉住,在整个使用的过程中,首先利用第一六轴机械臂、第二六轴机械臂和第三六轴机械臂的伸展便利性实施将第一牵引钩、第二牵引钩的伸展,第一牵引钩实施对切开皮肤的上部拉住,第二牵引钩将切开皮肤另外两侧拉住,从而不需要医护人员手持拉钩实施对切开皮肤拉住,因为第一六轴机械臂、第二六轴机械臂和第三六轴机械臂均是一种智能化的设备,相对比简易的机械杆的设置,提升了建腔装置的智能化程度,减少了医护人员手持拉钩实施牵引的工作量,也可以减少手术中辅助手术的医护人员数量,降低人力成本,进而给拉钩牵引装置的使用提供了便利。
7.另外,根据本技术实施例的一种智能免充气腔镜辅助建腔装置还具有如下附加的技术特征:
8.根据本技术的一些实施例,所述第一移动车体包括第一车架和第一万向轮,所述第一万向轮设置在所述第一车架底部,所述第一吸附件设置在所述第一车架底部。
9.根据本技术的一些实施例,所述第二移动车体包括第二车架和第二万向轮,所述第二万向轮设置在所述第二车架底部,所述第二吸附件设置在所述第二车架底部。
10.根据本技术的一些实施例,所述第一吸附件包括第一真空发生器、第一伸缩件、第一吸盘和第一升降架,所述第一真空发生器设置在所述第一车架内部,所述第一伸缩件一端固定连接在所述第一车架内部,所述第一伸缩件输出端与所述第一升降架固定连接,所述第一升降架上部滑动连接在所述第一车架内部,所述第一吸盘设置在所述第一升降架底部,所述第一真空发生器输入端与所述第一吸盘连通,所述第一吸盘吸入端朝向地面一侧。
11.根据本技术的一些实施例,所述第二吸附件包括第二真空发生器、第二伸缩件、第二吸盘和第二升降架,所述第二真空发生器设置在所述第二车架内部,所述第二伸缩件一端固定连接在所述第二车架内部,所述第二伸缩件输出端与所述第二升降架固定连接,所述第二升降架上部滑动连接在所述第二车架内部,所述第二吸盘设置在所述第二升降架底部,所述第二真空发生器输入端与所述第二吸盘连通,所述第二吸盘吸入端朝向地面一侧。
12.根据本技术的一些实施例,所述立杆上部设置有触控电脑终端,所述触控电脑终端设置有连接套,所述连接套固定套接在所述立杆外部。
13.根据本技术的一些实施例,所述连接套包括第一套体、第二套体和第一锁紧螺栓,所述第一套体一侧套在所述立杆外部,所述第一套体另一侧与所述触控电脑终端固定连接,所述第二套体套在所述立杆外部与所述第一套体之间固定连接,所述第一锁紧螺栓螺纹贯穿所述第二套体一侧抵在所述立杆外部。
14.根据本技术的一些实施例,所述第一六轴机械臂一侧设置有第一连接头,所述第
一连接头一侧设置有第一锁紧块和第二锁紧螺栓,所述第一连接头内部开设有第一插接槽,所述第一插接槽一侧开设有第一锁紧槽,所述第一牵引钩经过所述第一插接槽位于所述第一锁紧槽内部,所述第二锁紧螺栓螺纹穿过所述第一连接头一侧与所述第一锁紧块一侧转动连接,所述第一锁紧块滑动连接在所述第一插接槽底部,所述第一锁紧块一侧抵在所述第一牵引钩一侧。
15.根据本技术的一些实施例,所述第二六轴机械臂和所述第三六轴机械臂均设置有第二连接头,所述第二连接头一侧设置有第二锁紧块和第三锁紧螺栓,所述第二连接头内部开设有第二插接槽,所述第二插接槽一侧开设有第二锁紧槽,所述第二牵引钩经过所述第二插接槽位于所述第二锁紧槽内部,所述第三锁紧螺栓螺纹穿过所述第二连接头一侧与所述第二锁紧块一侧转动连接,所述第二锁紧块滑动连接在所述第二插接槽底部,所述第二锁紧块一侧抵在所述第二牵引钩一侧。
16.根据本技术的一些实施例,所述第一牵引钩和所述第二牵引钩一侧均设置有限位块,一个所述限位块经过所述第一插接槽位于所述第一锁紧槽内部,所述第一锁紧块一侧抵在所述限位块一侧,另一个所述限位块经过所述第二插接槽位于所述第二锁紧槽内部,所述第二锁紧块一侧抵在所述限位块一侧。
17.很多的拉钩牵引装置为了更好的实施对切开皮肤的多侧进行牵引,会在主牵引件两侧设置辅助牵引件,而经常使用的主牵引件和辅助牵引件不便于在不使用时,将主牵引件和辅助牵引件进行收纳,使得主牵引件和辅助牵引件不管是使用时还是不使用时,都会长期的裸露在外部,不仅不便于对主牵引件和辅助牵引件的防护,还不便于牵引装置的运输,并且长时间的裸露在外部,还会造成灰尘的堆积,因此给拉钩牵引装置的使用带来了不便;
18.根据本技术的一些实施例,还包括收纳组件,所述收纳组件包括第一收纳箱、限位杆、支撑架、第三伸缩件、第四伸缩件、垫块、锁止件和第二收纳箱,所述第一支撑板和所述第二支撑板均与所述立杆滑动连接,所述第一支撑板和所述第二支撑板均与所述限位杆外部滑动连接,所述限位杆底部一端与所述第一收纳箱内部固定连接,所述第一收纳箱固定连接在所述第二移动车体上部,所述限位杆上部一端与所述支撑架固定连接,所述支撑架底部与所述第一收纳箱一侧上部固定连接,一个所述垫块与所述第一支撑板底部固定连接,另一个所述垫块与所述第二支撑板底部固定连接,所述第三伸缩件底部和所述第四伸缩件底部均穿过所述第一收纳箱固定连接在所述第二移动车体内部,所述第三伸缩件输出端与一个所述垫块底部固定连接,所述第四伸缩件输出端与另一个所述垫块底部固定连接,所述锁止件设置在所述垫块两侧,所述锁止件锁止端抵在所述限位杆表面,所述第二收纳箱固定连接在所述立杆上部,所述第一六轴机械臂靠近所述立杆一侧位于所述第二收纳箱内部;
19.第一六轴机械臂的伸展折叠功能,在不使用时,将第一六轴机械臂进行折叠,在折叠的过程中,会自行折叠到第二收纳箱的内部,第一收纳箱与第二移动车体的上部固定连接,第三伸缩件和第四伸缩件的端部穿过第一收纳箱固定连接在第二移动车体的内部,第三伸缩件的输出端推动一个垫块的升降,垫块带动第一支撑板的升降,第一支撑板的升降带动第二六轴机械臂的升降,第二六轴机械臂实施折叠,将第二六轴机械臂折叠到第一支撑板的下方,第三伸缩件的输出端的回缩,带动第一支撑板和第二六轴机械臂的下降,第一
支撑板与限位杆之间滑动连接,实施对第一支撑板的限位,第三伸缩件的输出端持续回缩,将第二六轴机械臂收纳到第一收纳箱内部,第四伸缩件的输出端推动另一个垫块的升降,垫块带动第二支撑板的升降,第二支撑板的升降带动第三六轴机械臂的升降,第三六轴机械臂实施折叠,第四伸缩件的输出端回缩带动第二支撑板和第三六轴机械臂的下降,第二支撑板与限位杆之间滑动连接,实施对第二支撑板的限位,第四伸缩件的输出端持续回缩下,将第三六轴机械臂收纳到第一收纳箱的内部,在整个使用的过程中,即实现了对第一六轴机械臂的收纳,也实现了对第二六轴机械臂的单独升降,也实现了对第三六轴机械臂的单独升降,最终也实现了对第二六轴机械臂和第三机械部的收纳到第一收纳箱内部,便于拉钩牵引装置收纳搬运,也便于对辅助牵引件的防护,有效的减少灰尘的堆积,因此给拉钩牵引装置的使用带来了便利。
20.根据本技术的一些实施例,所述第一收纳箱底部设置有加强块,所述第二收纳箱底部设置有加强板,所述加强块与所述第二移动车体固定连接,所述加强板底部与所述第一收纳箱上部固定连接。
21.根据本技术的一些实施例,所述第一支撑板和所述第二支撑板均开设有通孔,所述通孔滑动连接在所述限位杆外部。
22.根据本技术的一些实施例,所述锁止件包括第五伸缩件、锁止块和滑板,所述滑板分别与所述第一支撑板和所述第二支撑板底部固定连接,所述锁止块与所述滑板滑动连接,所述第五伸缩件端部与所述垫块一侧固定连接,所述第五伸缩件输出端与所述锁止块一侧固定连接,所述锁止块另一侧抵在所述限位杆外部。
23.根据本技术的一些实施例,所述第二收纳箱靠近所述病床一侧铰接有箱盖,所述箱盖设置有第六伸缩件,所述第六伸缩件端部与所述第二收纳箱一侧转动连接,所述第六伸缩件输出端与所述箱盖转动连接。
24.牵引装置在每一次手术使用后,医护人员会擦拭设备并套上保护薄膜,清理后的牵引装置表面会残留清理液,并且在不使用的状态下,会残留清理液,也会有水汽进入到牵引装置的内部,造成牵引装置的污染,给后续使用带来不便;
25.根据本技术的一些实施例,还包干燥除湿组件,所述干燥除湿组件包括风机、空气净化箱、空气干燥箱、第一风头、第二风头和干燥剂,所述风机、所述空气净化箱和空气干燥箱均固定连接在所述第二车架内部,所述风机输出端与所述空气净化箱一侧连通,所述空气净化箱另一侧与所述空气干燥箱一侧连通,所述空气干燥箱另一侧分别与所述第一风头和第二风头连通,所述第一风头与所述第一收纳箱固定连接,所述第一风头与所述第一收纳箱内部连通,所述第二风头与所述第二收纳箱固定连接,所述第二风头与所述第二收纳箱内部连通,所述干燥剂分别设置在所述第一收纳箱和所述第二收纳箱内部;
26.当第一六轴机械臂收纳到第二收纳箱内部,第二六轴机械臂和第三六轴机械臂收纳到第一收纳箱的内部时,第一支撑板和第二支撑板盖在第一收纳箱的上部,风机将外界的空气输送到空气净化箱的内部,在空气净化箱的内部经活性炭的处理后,实施对空气的净化,空气净化箱与空气干燥箱连通,将净化后的空气输送到空气干燥箱的内部,经过空气干燥箱加热干燥后,输送到第一风头和第二风头的内部,第一风头将干燥净化后的空气吹到第一收纳箱的内部,将第一收纳箱内部的第二六轴机械臂和第三六轴机械臂进行干燥除湿处理,第二风头将干燥净化后的空气吹到第二收纳箱的内部,将第二收纳箱内部的第一
六轴机械臂进行干燥处理,并且将干燥剂分别设置在第一收纳箱和第二收纳箱的内部,实施长期对第一收纳箱和第二收纳箱的干燥处理,在整个使用的过程中,首先实现了对第一收纳箱内部的第二六轴机械臂和第三六轴机械臂的干燥除湿处理,也实现了对第二收纳箱内部的第一六轴机械臂的干燥处理,因此减少了牵引装置的污染,给后续使用便利。
27.根据本技术的一些实施例,所述空气净化箱内部设置有活性炭,所述空气干燥箱分别设置有电加热管和温控器,所述电加热管固定连接在所述空气干燥箱内部,所述温控器位于所述空气干燥箱外部与所述第二车架固定连接,所述温控器与所述电加热管电性连接。
附图说明
28.为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
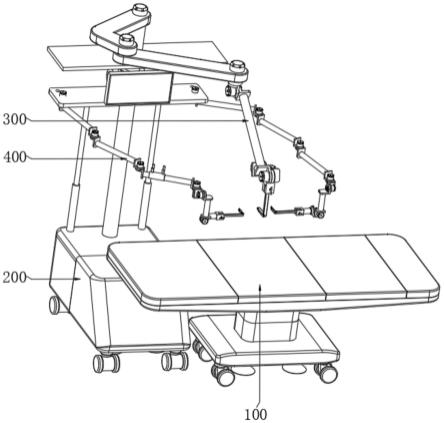
29.图1是本技术实施方式提供的一种智能免充气腔镜辅助建腔装置第一视角的结构示意图
30.图2是本技术实施方式提供的一种智能免充气腔镜辅助建腔装置第二视角的结构示意图;
31.图3为本技术实施方式提供的一种智能免充气腔镜辅助建腔装置第三视角的结构示意图;
32.图4为本技术实施方式提供第一吸附件和第二吸附件的部分结构图;
33.图5为本技术实施方式提供第一牵引组件的部分结构示意图;
34.图6为本技术实施方式提供第二牵引组件的部分结构示意图;
35.图7为本技术实施方式提供第一连接头和第二连接头的部分结构示意图;
36.图8为本技术实施方式提供第二六轴机械臂折叠的部分结构示意图;
37.图9为本技术实施方式提供收纳组件的部分结构示意图;
38.图10为本技术实施方式提供锁止件的部分结构示意图;
39.图11为本技术实施方式提供干燥除湿组件的第一视角部分结构示意图;
40.图12为本技术实施方式提供干燥除湿组件的第二视角部分结构示意图;
41.图13为本技术实施方式提供空气干燥箱的部分结构示意图。
42.图中:100-病床;110-第一移动车体;111-第一车架;112-第一万向轮;120-第一吸附件;121-第一真空发生器;122-第一伸缩件;123-第一吸盘;124-第一升降架;200-第二移动车体;210-第二吸附件;211-第二真空发生器;212-第二伸缩件;213-第二吸盘;214-第二升降架;220-第二车架;230-第二万向轮;300-第一牵引组件;310-立杆;311-触控电脑终端;312-连接套;3121-第一套体;3122-第二套体;3123-第一锁紧螺栓;320-第一六轴机械臂;321-第一连接头;322-第一锁紧块;323-第二锁紧螺栓;324-第一插接槽;325-第一锁紧槽;330-第一牵引钩;350-限位块;400-第二牵引组件;410-第一支撑板;412-通孔;420-第二支撑板;430-第二六轴机械臂;440-第三六轴机械臂;450-第二牵引钩;460-第二连接头;461-第二锁紧块;462-第三锁紧螺栓;463-第二插接槽;464-第二锁紧槽;500-收纳组件;
510-第一收纳箱;511-加强块;520-限位杆;530-支撑架;540-第三伸缩件;550-第四伸缩件;560-垫块;570-锁止件;571-第五伸缩件;572-锁止块;573-滑板;580-第二收纳箱;581-加强板;582-箱盖;583-第六伸缩件;600-干燥除湿组件;610-风机;620-空气净化箱;630-空气干燥箱;631-电加热管;632-温控器;640-第一风头;650-第二风头;660-干燥剂。
具体实施方式
43.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
44.下面参考附图描述根据本技术实施例的一种智能免充气腔镜辅助建腔装置。
45.如图1-图13所示,根据本技术实施例的一种智能免充气腔镜辅助建腔装置,包括病床100、第二移动车体200、第一牵引组件300和第二牵引组件400。
46.其中,病床100底部设置有第一移动车体110,第一移动车体110底部设置有第一吸附件120;第二移动车体200底部设置有第二吸附件210;第一牵引组件300包括立杆310、第一六轴机械臂320和第一牵引钩330,立杆310底部与第二移动车体200上部固定连接,第一六轴机械臂320一侧设置在立杆310上部,第一六轴机械臂320另一侧与第一牵引钩330固定连接;第二牵引组件400包括第一支撑板410、第二支撑板420、第二六轴机械臂430、第三六轴机械臂440和第二牵引钩450,第一支撑板410和第二支撑板420对称设置在立杆310两侧,第二六轴机械臂430一侧设置在第一支撑板410远离立杆310一侧,第二六轴机械臂430另一侧与一个第二牵引钩450固定连接,第三六轴机械臂440一侧设置在第二支撑板420远离立杆310一侧,第三六轴机械臂440另一侧与另一个第二牵引钩450固定连接。
47.需要说明的是,第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440均可以利用远端的遥控控制,也可以内置语音控制模块,通过语音对讲来进行智能化控制机械臂的运转,例如:向某一个方向进行移动多少距离或是向某一方向转动多少角度等,这些功能通过使用者的语音指令都可以完成,进一步提升设备的智能化,方便对设备进行控制。
48.进一步的,第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440不仅可以安装第一牵引钩330和第二牵引钩450,还可以实现辅助医生扶镜子、拉绳和供药等其它功能,同时也是通过内置语音控制模块实现语音交互。
49.语音控制模块实现的语音交互系统,为现有技术,也为本领域已知技术,在本技术文件中不再详细阐述。
50.进一步的,第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440均为现有技术,因此不再本技术文件中再做详细阐述。
51.下面参照附图描述根据本技术的一个具体实施例的一种智能免充气腔镜辅助建腔装置的工作过程;
52.首先,利用第一车架111和第一万向轮112将病床100移动到手术区,第一伸缩件122的输出端将第一升降架124向下推送,将第一吸盘123推送到与地面贴合,第一真空发生器121将第一吸盘123内部的空气抽出,将病床100进行固定限位;
53.再后,第二移动车体200将牵引装置移动到病床100一侧,第二伸缩件212的输出端将第二升降架214向下推动,将第二吸盘213推动到与地面贴合,第二真空发生器211将第二吸盘213内部的空气抽出,实施对牵引装置的固定和限位;
54.随后,第一六轴机械臂320进行伸展,将第一连接头321伸展到病人手术切口位置,将第一牵引钩330通过第一插接槽324安装在第一锁紧槽325内部,转动第二锁紧螺栓323将第一锁紧块322一侧牢固抵在第一牵引钩330一侧,实施对第一牵引钩330的限位和固定;
55.最后,伸展第二六轴机械臂430和第三六轴机械臂440,将第二连接头460伸展到病人手术切口位置,将第二牵引钩450通过第二插接槽463安装第二锁紧槽464内部,转动第三锁紧螺栓462将第二锁紧块461一侧牢固抵在第二牵引钩450一侧,实施对第二牵引钩450的限位和固定,第一牵引钩330实施对切开皮肤的上部拉住,两个第二牵引钩450将切开皮肤两侧拉住;
56.由此,整个使用的过程中,首先利用第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440的伸展便利性实施将第一牵引钩330、第二牵引钩450的伸展,第一牵引钩330实施对切开皮肤的上部拉住,并且,可以实现当仅需第一牵引钩330时,第二六轴机械臂430和第三六轴机械臂440可以独立不进行伸展,或是需要第一牵引钩330和第二牵引钩450时,第三六轴机械臂440可以独立的进行伸展,也就是根据使用需求可以独立的启用第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440作业且互不干扰,同时,是可以通过内置语音控制模块实现语音控制操作,为牵引装置的使用提供了智能化和便利化,第二牵引钩450将切开皮肤另外两侧拉住,从而减少了医护人员手持拉钩实施对切开皮肤拉住,进而给拉钩牵引装置的使用提供了便利。
57.另外,根据本技术实施例的一种智能免充气腔镜辅助建腔装置还具有如下附加的技术特征:
58.根据本技术的一些实施例,如图3所示,第一移动车体110包括第一车架111和第一万向轮112,第一万向轮112设置在第一车架111底部,第一吸附件120设置在第一车架111底部。
59.根据本技术的一些实施例,如图3所示,第二移动车体200包括第二车架220和第二万向轮230,第二万向轮230设置在第二车架220底部,第二吸附件210设置在第二车架220底部。
60.根据本技术的一些实施例,如图4所示,第一吸附件120包括第一真空发生器121、第一伸缩件122、第一吸盘123和第一升降架124,第一真空发生器121设置在第一车架111内部,第一伸缩件122一端固定连接在第一车架111内部,第一伸缩件122输出端与第一升降架124固定连接,第一升降架124上部滑动连接在第一车架111内部,第一吸盘123设置在第一升降架124底部,第一真空发生器121输入端与第一吸盘123连通,第一吸盘123吸入端朝向地面一侧。
61.根据本技术的一些实施例,如图4所示,第二吸附件210包括第二真空发生器211、第二伸缩件212、第二吸盘213和第二升降架214,第二真空发生器211设置在第二车架220内部,第二伸缩件212一端固定连接在第二车架220内部,第二伸缩件212输出端与第二升降架214固定连接,第二升降架214上部滑动连接在第二车架220内部,第二吸盘213设置在第二升降架214底部,第二真空发生器211输入端与第二吸盘213连通,第二吸盘213吸入端朝向
地面一侧。
62.需要说明的是,第一真空发生器121和第二真空发生器211就是利用正压气源产生负压的一种新型,高效,清洁,经济,小型的真空元器件,这使得在有压缩空气的地方,或在一个气动系统中同时需要正负压的地方获得负压变得十分容易和方便,为现有技术,不在本技术文件中再做详细阐述。
63.根据本技术的一些实施例,如图5所示,立杆310上部设置有触控电脑终端311,触控电脑终端311设置有连接套312,连接套312固定套接在立杆310外部,触控电脑终端311的设置实现了通过触控电脑终端311可以对第一六轴机械臂320、第二六轴机械臂430和第三六轴机械臂440的运行控制,并且可以通过触控电脑终端311控制第一真空发生器121、第一伸缩件122、第二真空发生器211、第二伸缩件212、第三伸缩件540、第四伸缩件550、第五伸缩件571、第六伸缩件583、风机610和温控器632的运行,总而言之通过触控电脑终端311可以实现对整个建腔装置的运行进行操控。
64.需要说明的是,立杆310与第二移动车体200上部为可拆卸式的固定连接,并设置有固定夹,该固定夹可与病床100之间进行固定连接,可以提升牵引装置的使用场景多样化,进一步的优化牵引装置的使用便利性。
65.根据本技术的一些实施例,如图5所示,连接套312包括第一套体3121、第二套体3122和第一锁紧螺栓3123,第一套体3121一侧套在立杆310外部,第一套体3121另一侧与触控电脑终端311固定连接,第二套体3122套在立杆310外部与第一套体3121之间固定连接,第一锁紧螺栓3123螺纹贯穿第二套体3122一侧抵在立杆310外部,便于转动连接套312,进而便于转动触控电脑终端311的角度,有利于医护人员的观察。
66.根据本技术的一些实施例,如图5和图7所示,第一六轴机械臂320一侧设置有第一连接头321,第一连接头321一侧设置有第一锁紧块322和第二锁紧螺栓323,第一连接头321内部开设有第一插接槽324,第一插接槽324一侧开设有第一锁紧槽325,第一牵引钩330经过第一插接槽324位于第一锁紧槽325内部,第二锁紧螺栓323螺纹穿过第一连接头321一侧与第一锁紧块322一侧转动连接,第一锁紧块322滑动连接在第一插接槽324底部,第一锁紧块322一侧抵在第一牵引钩330一侧,利用第一锁紧块322、第二锁紧螺栓323、第一插接槽324和第一锁紧槽325实施对第一牵引钩330的限位和锁紧,有效的防止第一牵引钩330的脱落。
67.根据本技术的一些实施例,如图6和图7所示,第二六轴机械臂430和第三六轴机械臂440均设置有第二连接头460,第二连接头460一侧设置有第二锁紧块461和第三锁紧螺栓462,第二连接头460内部开设有第二插接槽463,第二插接槽463一侧开设有第二锁紧槽464,第二牵引钩450经过第二插接槽463位于第二锁紧槽464内部,第三锁紧螺栓462螺纹穿过第二连接头460一侧与第二锁紧块461一侧转动连接,第二锁紧块461滑动连接在第二插接槽463底部,第二锁紧块461一侧抵在第二牵引钩450一侧,利用第二锁紧块461、第三锁紧螺栓462、第二插接槽463和第二锁紧槽464实施对第二牵引钩450的限位和锁紧,有效的防止第二牵引钩450的脱落。
68.根据本技术的一些实施例,如图7所示,第一牵引钩330和第二牵引钩450一侧均设置有限位块350,一个限位块350经过第一插接槽324位于第一锁紧槽325内部,第一锁紧块322一侧抵在限位块350一侧,另一个限位块350经过第二插接槽463位于第二锁紧槽464内
部,第二锁紧块461一侧抵在限位块350一侧。
69.需要说明的是,第二六轴机械臂430和第三六轴机械臂440均设置有卡套,用于安装供药装置,并且将第二牵引钩450进行更换成供药头,用于在手术过程中实施供药。
70.很多的拉钩牵引装置为了更好的实施对切开皮肤的多侧进行牵引,会在主牵引件两侧设置辅助牵引件,而经常使用的主牵引件和辅助牵引件不便于在不使用时,将主牵引件和辅助牵引件进行收纳,使得主牵引件和辅助牵引件不管是使用时还是不使用时,都会长期的裸露在外部,不仅不便于对主牵引件和辅助牵引件的防护,还不便于牵引装置的运输,并且长时间的裸露在外部,还会造成灰尘的堆积,因此给拉钩牵引装置的使用带来了不便。
71.根据本技术的一些实施例,如图3和图9-图10所示,还包括收纳组件500,收纳组件500包括第一收纳箱510、限位杆520、支撑架530、第三伸缩件540、第四伸缩件550、垫块560、锁止件570和第二收纳箱580,第一支撑板410和第二支撑板420均与立杆310滑动连接,第一支撑板410和第二支撑板420均与限位杆520外部滑动连接,限位杆520底部一端与第一收纳箱510内部固定连接,第一收纳箱510固定连接在第二移动车体200上部,限位杆520上部一端与支撑架530固定连接,支撑架530底部与第一收纳箱510一侧上部固定连接,一个垫块560与第一支撑板410底部固定连接,另一个垫块560与第二支撑板420底部固定连接,第三伸缩件540底部和第四伸缩件550底部均穿过第一收纳箱510固定连接在第二移动车体200内部,第三伸缩件540输出端与一个垫块560底部固定连接,第四伸缩件550输出端与另一个垫块560底部固定连接,锁止件570设置在垫块560两侧,锁止件570锁止端抵在限位杆520表面,第二收纳箱580固定连接在立杆310上部,第一六轴机械臂320靠近立杆310一侧位于第二收纳箱580内部。
72.第一六轴机械臂320的伸展折叠功能,在不使用时,将第一六轴机械臂320进行折叠,在折叠的过程中,会自行折叠到第二收纳箱580的内部,第六伸缩件583输出端的回缩,将箱盖582盖在第二收纳箱580的一侧,第一收纳箱510与第二车架220的上部固定连接,第三伸缩件540和第四伸缩件550的端部穿过第一收纳箱510固定连接在第二车架220的内部,第三伸缩件540的输出端推动一个垫块560的升降,垫块560带动第一支撑板410的升降,第一支撑板410的升降带动第二六轴机械臂430的升降,第二六轴机械臂430实施折叠,将第二六轴机械臂430折叠到第一支撑板410的下方,第三伸缩件540的输出端的回缩,带动第一支撑板410和第二六轴机械臂430的下降,第一支撑板410设置的通孔412滑动连接限位杆520外部,实施对第一支撑板410的限位,第三伸缩件540的输出端持续回缩,将第二六轴机械臂430收纳到第一收纳箱510内部,第四伸缩件550的输出端推动另一个垫块560的升降,垫块560带动第二支撑板420的升降,第二支撑板420的升降带动第三六轴机械臂440的升降,第三六轴机械臂440实施折叠,第四伸缩件550的输出端回缩带动第二支撑板420和第三六轴机械臂440的下降,第二支撑板420设置的通孔412滑动连接在限位杆520外部,实施对第二支撑板420的限位,第四伸缩件550的输出端持续回缩下,将第三六轴机械臂440收纳到第一收纳箱510的内部,在整个使用的过程中,即实现了对第一六轴机械臂320的收纳,也实现了对第二六轴机械臂430的单独升降,也实现了对第三六轴机械臂440的单独升降,最终也实现了对第二六轴机械臂430和第三机械部的收纳到第一收纳箱510内部,便于拉钩牵引装置收纳搬运,也便于对辅助牵引件的防护,有效的减少灰尘的堆积,因此给拉钩牵引装置的使
用带来了便利。
73.根据本技术的一些实施例,如图9所示,第一收纳箱510底部设置有加强块511,第二收纳箱580底部设置有加强板581,加强块511与第二移动车体200固定连接,加强板581底部与第一收纳箱510上部固定连接。
74.根据本技术的一些实施例,如图8所示,第一支撑板410和第二支撑板420均开设有通孔412,通孔412滑动连接在限位杆520外部。
75.根据本技术的一些实施例,如图10所示,锁止件570包括第五伸缩件571、锁止块572和滑板573,滑板573分别与第一支撑板410和第二支撑板420底部固定连接,锁止块572与滑板573滑动连接,第五伸缩件571端部与垫块560一侧固定连接,第五伸缩件571输出端与锁止块572一侧固定连接,锁止块572另一侧抵在限位杆520外部。
76.第二收纳箱580靠近病床100一侧铰接有箱盖582,箱盖582设置有第六伸缩件583,第六伸缩件583端部与第二收纳箱580一侧转动连接,第六伸缩件583输出端与箱盖582转动连接
77.牵引装置在每一次手术使用后,医护人员会擦拭设备并套上保护薄膜,清理后的牵引装置表面会残留清理液,并且在不使用的状态下,会残留清理液,也会有水汽进入到牵引装置的内部,造成牵引装置的污染,给后续使用带来不便。
78.根据本技术的一些实施例,如图3和图11-图13所示,还包干燥除湿组件600,干燥除湿组件600包括风机610、空气净化箱620、空气干燥箱630、第一风头640、第二风头650和干燥剂660,风机610、空气净化箱620和空气干燥箱630均固定连接在第二车架220内部,风机610输出端与空气净化箱620一侧连通,空气净化箱620另一侧与空气干燥箱630一侧连通,空气干燥箱630另一侧分别与第一风头640和第二风头650连通,第一风头640与第一收纳箱510固定连接,第一风头640与第一收纳箱510内部连通,第二风头650与第二收纳箱580固定连接,第二风头650与第二收纳箱580内部连通,干燥剂660分别设置在第一收纳箱510和第二收纳箱580内部。
79.当第一六轴机械臂320收纳到第二收纳箱580内部,第二六轴机械臂430和第三六轴机械臂440收纳到第一收纳箱510的内部时,第一支撑板410和第二支撑板420盖在第一收纳箱510的上部,风机610将外界的空气输送到空气净化箱620的内部,在空气净化箱620的内部经活性炭的处理后,实施对空气的净化,空气净化箱620与空气干燥箱630连通,将净化后的空气输送到空气干燥箱630的内部,经过空气干燥箱630加热干燥后,输送到第一风头640和第二风头650的内部,第一风头640将干燥净化后的空气吹到第一收纳箱510的内部,将第一收纳箱510内部的第二六轴机械臂430和第三六轴机械臂440进行干燥除湿处理,第二风头650将干燥净化后的空气吹到第二收纳箱580的内部,将第二收纳箱580内部的第一六轴机械臂320进行干燥处理,并且将干燥剂660分别设置在第一收纳箱510和第二收纳箱580的内部,实施长期对第一收纳箱510和第二收纳箱580的干燥处理,在整个使用的过程中,首先实现了对第一收纳箱510内部的第二六轴机械臂430和第三六轴机械臂440的干燥除湿处理,也实现了对第二收纳箱580内部的第一六轴机械臂320的干燥处理,也实现了对第二收纳箱580内部的第一六轴机械臂320的干燥处理,因此减少了牵引装置的污染,给后续使用便利。
80.根据本技术的一些实施例,如图12和图13所示,空气净化箱620内部设置有活性
炭,空气干燥箱630分别设置有电加热管631和温控器632,电加热管631固定连接在空气干燥箱630内部,温控器632位于空气干燥箱630外部与第二车架220固定连接,温控器632与电加热管631电性连接。
81.进一步的,第一伸缩件122、第二伸缩件212、第三伸缩件540、第四伸缩件550、第五伸缩件571和第六伸缩件583,均为电动推杆、电缸、液压杆、液压缸和气缸设置。
82.根据本技术实施例的一种智能免充气腔镜辅助建腔装置的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
83.在本技术所提供的几个实施例中,应该理解到,所揭露的装置和方法,也可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的。
84.以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1