一种用于肠内营养输送管导航的内窥镜装置及导航方法与流程
1.本发明涉及医疗器械领域,特别是一种用于肠内营养输送管导航的内窥镜装置及导航方法。
背景技术:
2.肠内营养输送管,是经肠道提供代谢需要的营养物质及其他各种营养素的营养支持方式,多用于icu科室,适用于肠道功能基本正常而胃功能受损、胃瘫或误吸风险较高的患者。而安全有效地实施肠内营养的前提是要选择一条合理的营养管放置途径。肠内营养置管途径及技术种类有多种。从置入导管管端的位置上来讲,可分为幽门前置管(胃内置管)和幽门后置管两大类;幽门后置管主要是指十二指肠及空肠内置管技术,适用于肠道功能基本正常而胃功能受损、胃瘫或误吸风险较高的患者,常见的具体方案为经鼻十二指肠置管或空肠置管,是将营养管经鼻腔、食管、胃放入十二指肠或空肠内的方法。
3.但是,上述方法依然存在一定问题,第一,目前行业内大多数同类场景都采取盲插,即依靠医生经验和手感完成;第二,市面上虽然也有内镜辅助置管技术,但是内镜和营养管是分别置入体内的,营养管经鼻置入,内镜经口腔置入,而内镜只能提供人体内部影像,起到看的作用,不能为导管的方向调节提供外力。
技术实现要素:
4.为了克服现有技术的上述缺点,本发明的目的是提供一种用于肠内营养输送管导航的内窥镜装置及导航方法,以解决上述问题,优化营养管的插入过程。
5.本发明解决其技术问题所采用的技术方案是:
6.一种用于肠内营养输送管导航的内窥镜装置,其中,包括导丝入口、插入管机构和导丝机构;所述导丝入口与所述插入管机构连接,所述导丝机构通过所述导丝入口穿设在所述插入管机构内;所述插入管机构与所述内窥镜连接。
7.作为本发明的进一步改进:所述插入管机构包括插入管头、插入管身、蛇骨组件和先端头组件;所述插入管头上设置有所述导丝入口,所述插入管身的一端与所述插入管头连接,所述插入管身的另一端与所述蛇骨组件的一端连接,所述蛇骨组件的另一端与所述先端头组件连接。
8.作为本发明的进一步改进:还包括拔杆机构,所述拔杆机构包括拔杆、钢丝绳轮、第一钢丝绳和第二钢丝绳;所述第一钢丝绳的一端和所述第二钢丝绳的一端设置在所述钢丝绳轮上,所述第一钢丝绳的另一端和所述第二钢丝绳的另一端穿过所述插入管头和所述插入管身与所述蛇骨组件连接,所述拔杆设置在所述钢丝绳轮上。
9.作为本发明的进一步改进:所述拔杆机构设置在手柄内,所述手柄的底端与所述插入管头连接。
10.作为本发明的进一步改进:所述先端头组件包括先端头身、摄像镜头、第一led灯、第二led灯和器械通道口;所述先端头身上设置所述摄像镜头、所述第一led灯、所述第二
led灯和所述器械通道入口。
11.作为本发明的进一步改进:所述导丝机构包括导丝和导丝软头;所述导丝与所述导丝软头连接。
12.作为本发明的进一步改进:所述手柄的顶部设置有拍照按钮,所述手柄的底端连接有信号线机构。
13.作为本发明的进一步改进:所述信号线机构包括信号线和信号线接头;所述信号线的一端与所述手柄连接,所述信号线的另一端与所述信号线接头连接。
14.本发明还提供另一种实施方案为一种用于肠内营养输送管导航的内窥镜装置导航方法,其中,应用如上述任意一项所述的一种用于肠内营养输送管导航的内窥镜装置,还包括如下步骤:
15.步骤一:将带有内窥镜的插入管机构的一端从标准鼻饲营养管一端插入,而后从另一端伸出并露出一小段;
16.步骤二:将插入管机构带着营养管,插入待测入口,经过待测前置部位;
17.步骤三:根据观察图像处理器,控制插入管机构带着营养管继续深入,同时通过拨杆控制蛇骨组件弯曲来寻找待测点;
18.步骤四:看到待测点后,将导丝机构通过导丝入口插入内窥镜,当导丝软头从器械通道口穿出后,继续控制导丝机构深入,将导丝软头首先探入待测点;
19.步骤五:当导丝软头通过器械通道口一段距离后,插入管机构带着营养管继续深入,利用导丝的刚性进行导航,将插入管机构和营养管同步探入待测点,而后通过拔杆反复控制蛇骨组件弯曲直至营养管成功通过待测点,进入待测部位;
20.步骤六:抽出插入管机构和导丝机构,结束导航。
21.与现有技术相比,本发明的有益效果是:
22.通过导丝机构和插入管机构的组合使用来优化营养管的插入过程,使得导丝机构能够帮助插入管机构进行弯曲活动,能够有效缩短插管时间,从而提高探测效率。
附图说明
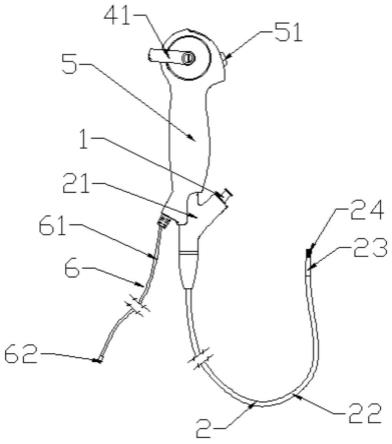
23.图1为本发明的整体结构示意图。
24.图2为本发明的拔杆机构内部结构示意图。
25.图3为本发明的导丝机构结构示意图。
26.图4为本发明的先端头组件结构示意图。
具体实施方式
27.现结合附图说明与实施例对本发明进一步说明:
28.实施例一:
29.本实施例提供如附图1-4所示的一种用于肠内营养输送管导航的内窥镜装置,其中,包括导丝入口1、插入管机构2和导丝机构3;所述导丝入口1与所述插入管机构2连接,所述导丝机构3通过所述导丝入口1穿设在所述插入管机构2内;所述插入管机构2与所述内窥镜连接。
30.在本实施例中,所述导丝机构3通过所述导丝入口1进入所述插入管机构2内部,并
从所述插入管机构2的另一端伸出,从而进一步帮助插入管机构2在体内进行活动。若只是通过插入管机构2在体内活动,当医生在体外对插入管机构2的一端施加驱动力时,会造成插入管机构2本身的管身部分在人体内部,例如在胃部时,本身的弯曲度增加,但插入管机构2的另一端的端头却保持原地不动,从而给插入的活动过程造成困难,延长了插管时间。而在插入管机构2内部增加导丝机构3,通过导丝机构3帮助插入管机构2进行活动。导丝机构3和内窥镜的插入管机构2互相提供方向导航,使得医生在体外施加驱动力时,插入管机构2能够进一步向目标前进。
31.下面继续对本实施例中的插入管机构2做进一步详细描述,如附图1所示,所述插入管机构2包括插入管头21、插入管身22、蛇骨组件23和先端头组件24;所述插入管头21上设置有所述导丝入口1,所述插入管身22的一端与所述插入管头21连接,所述插入管身22的另一端与所述蛇骨组件23的一端连接,所述蛇骨组件23的另一端与所述先端头组件24连接。所述插入管头21用于固定所述导丝入口1,避免导丝入口1移动。所述插入管身22的一端设置所述蛇骨组件23,所述蛇骨组件23为内窥镜行业专用标准部件。所述先端头组件24用于照明、拍摄插入管的头部所处位置的情况,以及供所述导丝机构3穿出。
32.为了进一步控制蛇骨组件23的运动,帮助插入管组件在探寻目标,本实施例还包括拔杆机构4,如附图2所示,所述拔杆机构4包括拔杆41、钢丝绳轮42、第一钢丝绳43和第二钢丝绳44;所述第一钢丝绳43的一端和所述第二钢丝绳44的一端设置在所述钢丝绳轮42上,所述第一钢丝绳43的另一端和所述第二钢丝绳44的另一端穿过所述插入管头21和所述插入管身22与所述蛇骨组件23连接,所述拔杆41设置在所述钢丝绳轮42上。拔杆41通过控制钢丝绳轮42的转动,利用定滑轮原理,从而带动第一钢丝绳43和第二钢丝绳44向上或向下,使得第一钢丝绳43和第二钢丝绳44进行反方向运动,进而控制蛇骨组件23在不同方向上弯曲或伸直,通过钢丝绳的运动来控制整个插入管机构2的弯曲或伸直,从而帮助插入管机构2进行活动,探索目标。
33.继续对本实施例的把杆机构做进一步详细描述,如附图1所示,所述拔杆机构4设置在所述手柄5内,所述手柄5的底端与所述插入管头21连接。
34.继续对本实施例中的先端头组件24做进一步详细描述,如附图4所示,所述先端头组件24包括先端头身241、摄像镜头242、第一led灯243、第二led灯244和器械通道口245;所述先端头身241上设置所述摄像镜头242、所述第一led灯243、所述第二led灯244和所述器械通道入口。
35.为了进一步优化导丝机构3的导航能力,在本实施例中,如附图3所示,所述导丝机构3包括导丝31和导丝软头32;所述导丝31与所述导丝软头32连接。所述导丝31具有良好的刚性,所述导丝软头32则为质地较软的材料,利用导丝31的刚性的刚性,从而进一步为插入管机构2提供方向导航。
36.继续对本实施例中的手柄5做进一步详细描述,如附图1所示,所述手柄5的顶部设置有拍照按钮51,所述手柄5的底端连接有信号线机构6。所述信号线机构6包括信号线61和信号线接头62;所述信号线61的一端与所述手柄5连接,所述信号线61的另一端与所述信号线接头62连接。
37.实施例二:
38.本实施例提供一种用于肠内营养输送管导航的内窥镜装置导航方法,其中,应用
如上述任意一项所述的一种用于肠内营养输送管导航的内窥镜装置,还包括如下步骤:
39.步骤一:将带有内窥镜的插入管机构的一端从标准鼻饲营养管一端插入,而后从另一端伸出并露出一小段;
40.步骤二:将插入管机构带着营养管,插入待测入口,经过待测前置部位;在本实施例中,待测入口为鼻腔,待测前置部位为贲门和胃部;
41.步骤三:根据观察图像处理器,控制插入管机构带着营养管继续深入,同时通过拨杆控制蛇骨组件弯曲来寻找待测点;在本实施例中,待测点为幽门口;
42.步骤四:看到待测点后,将导丝机构通过导丝入口插入内窥镜,当导丝软头从器械通道口穿出后,继续控制导丝机构深入,将导丝软头首先探入待测点;
43.步骤五:当导丝软头通过器械通道口一段距离后,插入管机构带着营养管继续深入,利用导丝的刚性进行导航,将插入管机构和营养管同步探入待测点,而后通过拔杆反复控制蛇骨组件弯曲直至营养管成功通过待测点,进入待测部位;本实施例中的待测部位为十二指肠或者空肠;
44.步骤六:抽出插入管机构和导丝机构,结束导航。
45.与现有技术相比,本发明的有益效果是:
46.通过导丝机构和插入管机构的组合使用来优化营养管的插入过程,使得导丝机构能够帮助插入管机构进行弯曲活动,能够有效缩短插管时间,从而提高探测效率。
47.本发明的详细描述:
48.1、导航方法:使用本方案的器械组合,在临床操作时通过如下步骤操作:
49.第一步:医生将内窥镜的插入管机构2,从标准鼻饲营养管一端插入,并且从另一端露出一小段。需要说明的是,内窥镜插入部组件的设计长度,大于标准营养管的长度。
50.第二步:医生操作内窥镜,将插入管机构2带着营养管,插入患者的鼻腔,经过贲门,进入患者的胃部;
51.第三步:医生通过观察图像处理器(为配套使用的器械或系统)上的画面,根据人体内部图像,一边控制插入管机构2带着营养管继续深入,一边通过拨杆控制蛇骨组件23弯曲,同时查看不同方向的影像,寻找幽门口;
52.第四步:看到幽门口之后,医生将导丝机构3从导丝入口1插入内窥镜,当导丝软头32从器械通道口245穿出后,继续控制导丝机构3深入,利用导丝软头32的柔软度和重力作用,将导丝软头32首先探入幽门口。此时因为临床手术时患者是躺着的,这种体位之下幽门口的方向正好是重力的方向;
53.第五步:当导丝31头部离开器械通道口245一段距离后(大约3~4cm),医生控制将插入管机构2带着营养管继续深入,利用导丝31的刚性导航作用,将插入管组件和营养管同步探入幽门口。此时可以通过拨杆控制蛇骨组件23弯曲,进一步小幅度修正导丝31的方向。如此反复几个来回,通过插入管与导丝31互为导航,直到营养管可以成功通过幽门,置入十二指肠或者空肠;
54.第六步:抽出插入管机构2和导丝机构3,置管手术结束;
55.关于“互为导航”的概念,可以从两个方面来理解:
56.(1)内窥镜的插入管总体上比较软,当插入人体胃部之后,在没有导丝机构3的情况下,医生在体外继续施加驱动力,先端头部分却很难继续前进,造成的结果是插入管组件
的管身部分在人体胃部的弯曲度增加,但先端头却保持原地不动。导丝软头32的柔性和导丝机构3本体的刚性,为内窥镜的插入管机构2提供方向导航,在这种导航作用之下,医生在体外施加驱动力,先端头组件24可以进一步向目标前进;
57.(2)内窥镜的蛇骨组件23的适当弯曲可以修正导丝机构3前进的方向,同时插入管机构2也为导丝机构3提供前进轨道。
58.综上所述,本领域的普通技术人员阅读本发明文件后,根据本发明的技术方案和技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本发明所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1