一种中控脚轮控制装置及超声设备的制作方法
1.本实用新型涉及医疗设备技术领域,特别涉及一种中控脚轮控制装置及超声设备。
背景技术:
2.目前医疗设备中,主要采用单独控制刹车与释放,在设备移动和停止时,需要单独对每个脚轮进行锁紧和释放操作,有时甚至需要绕机器一周进行操作,这种操作方式即为不便。目前,虽已有设计采用中控方式来锁紧和释放操作机器。但是,操作均采用双踏板控制方式,存在结构复杂,占用空间尺寸较大等缺点。
技术实现要素:
3.本实用新型公开了一种中控脚轮控制装置及超声设备,用于实现单脚操作即可控制移动和刹车锁紧功能的切换。
4.为达到上述目的,本实用新型提供以下技术方案:
5.第一方面,本实用新型提供一种中控脚轮控制装置,包括:
6.底板;
7.安装于所述底板的主动轴,所述主动轴可相对所述底板绕其自身轴线转动;
8.传动机构,所述传动机构与所述主动轴传动连接;
9.中控脚轮,所述中控脚轮上的凸轮与所述传动机构传动连接,所述传动机构可带动所述凸轮转动,以释放或锁紧所述中控脚轮;
10.踏板,所述踏板与所述主动轴连接,用于驱动所述主动轴沿第一方向转动,且所述踏板具有锁紧工位和释放工位,当所述踏板处于所述锁紧工位时所述中控脚轮被锁紧,当所述踏板处于所述释放工位时,所述中控脚轮被释放;
11.与所述踏板传动连接的踏板控制机构,所述踏板控制机构用于当所述踏板处于所述锁紧工位且无驱动力作用时限位所述踏板,还用于当所述踏板处于所述释放工位且无驱动力作用时限位所述踏板;
12.弹性复位件,用于驱动所述主动轴沿第二方向转动,所述第二方向与所述第一方向相反。
13.上述中控脚轮控制装置包括底板以及安装于底板的踏板、主动轴、传动机构、中控脚轮、弹性复位件和踏板控制机构,单次踩下踏板,踏板带动主动轴和传动机构运动,中控脚轮转动一定角度,实现锁紧。再次踩下踏板,弹性复位件通过主动轴带动中控脚轮和传动机构反向运动,中控脚轮复位,刹车释放。踏板控制机构可以保证踏板在无驱动力作用时能停留在锁紧工位或者释放工位,从而控制主动轴及传动机构实现前进、复位两种状态,来实现中控脚轮的锁紧和释放。本实用新型提供的中控脚轮控制装置可单踏板操作整个中控脚轮系统,实现中控脚轮的锁紧或释放。
14.可选地,所述踏板控制机构包括:第一连杆、第二连杆、限位件和轨迹块;
15.所述第一连杆一端与所述踏板连接,另一端与所述第二连杆铰接,且所述第一连杆与所述踏板形成l形结构;
16.所述限位件位于所述第二连杆远离所述第一连杆一端,且所述限位件与所述第二连杆形成l形结构;所述限位件远离所述第二连杆一端与所述轨迹块滑动连接;
17.所述轨迹块上具有与所述限位件滑动配合的环形限位轨迹面,所述环形限位轨迹面包括第一限位点和第二限位点、以及连接所述第一限位点和所述第二限位点的第一过渡面和第二过渡面;
18.当所述踏板处于所述锁紧工位时,所述限位件位于所述第一限位点,当所述踏板处于所述释放工位时,所述限位件位于所述第二限位点。
19.可选地,所述第一过渡面包括第一轨迹面和第二轨迹面,所述第二过渡面包括第三轨迹面和第四轨迹面,所述第二轨迹面与所述第三轨迹面之间形成止回台阶,以使所述限位件仅允许由所述第二轨迹面滑动至所述第三轨迹面。
20.可选地,所述限位件为伸缩杆;
21.当所述伸缩杆由所述第一限位点沿所述第一过渡面滑动至所述第二限位点时,所述伸缩杆的长度逐渐增大;当所述伸缩杆由所述第二限位点沿所述第二过渡面滑动至所述第一限位点时,所述伸缩杆的长度逐渐减小。
22.可选地,所述伸缩杆包括固定轴、浮动轴套和弹性件;
23.所述浮动轴套与所述轨迹块滑动连接;
24.所述固定轴一端与所述第二连杆连接,另一端与所述浮动轴套套接;所述浮动轴套可相对所述固定轴沿其自身轴线方向滑动,也可相对所述固定轴绕其自身轴线转动;所述固定轴与所述浮动轴套之间还设有用于限定所述浮动轴套沿其自身轴线方向滑动极限位置的限位台阶;
25.所述弹性件用于始终为所述浮动轴套提供远离所述第二连杆的作用力,以使所述浮动轴套始终贴合在所述轨迹块上。
26.可选地,所述伸缩杆为弹性杆。
27.可选地,所述传动机构为曲柄连杆机构。
28.可选地,所述传动机构包括传动带组件。
29.可选地,所述传动机构包括传动链组件。
30.第二方面,本实用新型还提供一种超声设备,包括:显示屏、控制面板、主机以及如第一方面中任一项所述的中控脚轮控制装置,所述主机安装于所述中控脚轮控制装置,所述显示屏以及所述控制面板均与所述主机信号连接。
附图说明
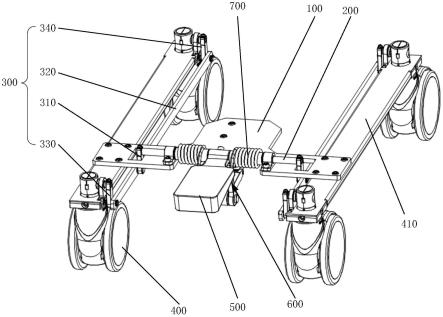
31.图1为本实用新型实施例提供的一种中控脚轮控制装置的结构示意图之一;
32.图2为中控脚轮的结构示意图;
33.图3为中控脚轮的锁紧和释放状态的角度范围示意图;
34.图4为踏板控制机构在踏板释放工位时的结构示意图;
35.图5为踏板控制机构在踏板锁紧工位时的结构示意图;
36.图6为轨迹块的结构示意图;
37.图7为伸缩杆的结构示意图之一;
38.图8为浮动轴套的行程-位移示意图;
39.图9为弹性杆与轨迹块的配合结构示意图;
40.图10为本实用新型实施例提供的一种中控脚轮控制装置的结构示意图之二;
41.图11为本实用新型实施例提供的一种超声设备的结构示意图。
42.图标:100-底板;200-主动轴;300-曲柄连杆机构;400-中控脚轮;500-踏板;600-踏板控制机构;700-弹性复位件;800-传动带组件;900-超声设备;310-第一曲柄;320-第三连杆;330-第二曲柄;340-第三曲柄;410-脚轮支架;610-第一连杆;620-第二连杆;630-轨迹块;640-伸缩杆;650-弹性杆;611-固定螺钉;631-第一轨迹面;632-第二轨迹面;633-第三轨迹面;634-第四轨迹面;641-固定轴;642-浮动轴套;643-弹性件;644-限位台阶;910-显示屏;920-控制面板;930-主机。
具体实施方式
43.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
44.第一方面,如图1至图10所示,本实用新型实施例提供了一种中控脚轮控制装置,包括:底板100;安装于底板100的主动轴200,主动轴200可相对底板100绕其自身轴线转动;传动机构,传动机构与主动轴200传动连接;中控脚轮400,中控脚轮400上的凸轮与传动机构传动连接,传动机构可带动凸轮转动,以释放或锁紧中控脚轮400;踏板500,踏板500与主动轴200连接,用于驱动主动轴200沿第一方向转动,且踏板500具有锁紧工位和释放工位,当踏板500处于锁紧工位时中控脚轮400被锁紧,当踏板500处于释放工位时,中控脚轮400被释放;与踏板500传动连接的踏板控制机构600,踏板控制机构600用于当踏板500处于锁紧工位且无驱动力作用时限位踏板500,还用于当踏板500处于释放工位且无驱动力作用时限位踏板500;弹性复位件700,用于驱动主动轴200沿第二方向转动,第二方向与第一方向相反。
45.上述中控脚轮控制装置包括底板100以及安装于底板100的踏板500、主动轴200、传动机构、中控脚轮400、弹性复位件700和踏板控制机构600,单次踩下踏板500,踏板500带动主动轴200和传动机构运动,中控脚轮400转动一定角度,实现锁紧。再次踩下踏板500,弹性复位件700通过主动轴200带动中控脚轮400和传动机构反向运动,中控脚轮400复位,刹车释放。踏板控制机构600可以保证踏板500在无驱动力作用时能停留在锁紧工位或者释放工位,从而控制主动轴200及传动机构实现前进、复位两种状态,来实现中控脚轮400的锁紧和释放。本实用新型提供的中控脚轮控制装置可单踏板500操作整个中控脚轮400系统,实现中控脚轮400的锁紧或释放。
46.示例性的,弹性复位件700为扭簧。
47.需要说明的是,第一方向为顺时针方向或者逆时针方向,第二方向与第一方向相反,即第二方向对应为逆时针方向或者顺时针方向。
48.一种可能实现的方式中,参照图1,两个中控脚轮400通过脚轮支架410连接成脚轮
组,两个脚轮组相对安装于底盘的两侧,且两个脚轮支架410平行。踏板500安装于底盘的中部,主动轴200的两端分别通过一个传动机构与对应的两个中控脚轮400传动连接,且位于主动轴200的中部,使得一个踏板500同时控制两组的中控脚轮400。结合图2和图3,踏板500通过主动轴200以及传动机构带动中控脚轮400内的凸轮沿顺时针或逆时针方向在一定角度内转动,从而实现中控脚轮400的锁紧或释放功能。可以理解的是,每个脚轮组中的两个中控脚轮400可以采用反向安装,从而实现两个中控脚轮400同时锁紧以及同时释放。
49.中控脚轮400有两个角度位置,一个为锁紧位,一个是释放位(自由位)。参照图2和图3,当中控脚轮400中的凸轮处于初始状态时,中控脚轮400处于释放状态,此时踏板500所对应的位置为释放工位,当中控脚轮400的凸轮从自由状态如图3所示逆时针转动θ角度时,中控脚轮400处于锁定状态,此时踏板500所对应的位置为锁紧工位。
50.可选地,传动机构为曲柄连杆机构300。
51.一种可能实现的方式中,继续参照图1,传动机构包括与主动轴200传动连接的第一曲柄310,与第一曲柄310传动连接的第三连杆320,均与第三连杆320传动连接的第二曲柄330和第三曲柄340,其中,第一曲柄310与第三连杆320的中部连接,第二曲柄330和第三曲柄340分别与第三连杆320的两端连接,形成曲柄连杆机构300。第二曲柄330通过六角杆与中控脚轮400上的凸轮连接,第三曲柄340通过另一六角杆与另一中控脚轮400上的凸轮连接。
52.可选地,踏板控制机构600包括:第一连杆610、第二连杆620、限位件和轨迹块630;第一连杆610一端与踏板500连接,另一端与第二连杆620铰接,且第一连杆610与踏板500形成l形结构;限位件位于第二连杆620远离第一连杆610一端,且限位件与第二连杆620形成l形结构;限位件远离第二连杆620一端与轨迹块630滑动连接;轨迹块630上具有与限位件滑动配合的环形限位轨迹面,环形限位轨迹面包括第一限位点m和第二限位点n、以及连接第一限位点m和第二限位点n的第一过渡面和第二过渡面;当踏板500处于锁紧工位时,限位件位于第一限位点m,当踏板500处于释放工位时,限位件位于第二限位点n。
53.一种可能实现的方式中,参照图4和图5,第一连杆610与踏板500中远离踩踏端的另一端连接形成l形结构,示例性的,第一连杆610与踏板500为一体式结构,第一连杆610与踏板500的连接端通过固定螺钉611安装于主动轴200上,使得主动轴200与踏板500同时转动。第一连杆610远离踏板500一端与第二连杆620铰接,第二连杆620另一端连接有限位件,限位杆与第二连接杆形成l形结构。轨迹块630上具有与限位件滑动配合的环形限位轨迹面,使得限位件始终在规定的轨迹内滑动,以保证踏板500在锁紧工位和释放工位之间顺利切换。如图4所示,踏板500处于释放工位,此时踏板500未被踩踏,限位件位于第一限位点m,当踏板500被踩下,踏板500带动主动轴200逆时针转动一定角度,第一连杆610推动第二连杆620向轨迹块630滑动,限位件沿第一过渡面滑动至第二限位点n,此时踏板500处于锁紧工位,如图5所示,由于第二限位点n的限位作用,即使松开踏板500,踏板500也不会自动弹回,即使中控脚轮400处于锁紧状态。再次踩下踏板500,踏板500再次带动主动轴200逆时针转动一定角度,第一连杆610继续推动第二连杆620向轨迹块630滑动,限位件自第二限位点n滑至第二过渡面,此时松开踏板500,踏板500在弹性复位件700的作用下顺时针转动,限位件自第二过渡面滑至第一限位点m,踏板500处于锁紧工位。
54.为了更好的限定第一限位点m和第二限位点n,轨迹块630在第一限位点m和第二限
位点n处均设置止回台阶。
55.一种可能实现的方式中,参照图6,第一过渡面包括第一轨迹面631和第二轨迹面632,第二过渡面包括第三轨迹面633和第四轨迹面634,第二轨迹面632与第三轨迹面633之间形成止回台阶,以使限位件仅允许由第二轨迹面632滑动至第三轨迹面633。第二轨迹面632与第三轨迹面633之间形成止回台阶,以限定第二限位点n的位置。第一限位点m可以通过弹性复位件700的作用力配合限定。
56.为了更好的限定限位件的活动轨迹,也可在相邻轨迹面之间均设置止回台阶,示例性的,第一轨迹面与第二轨迹面之间设置止回台阶,第二轨迹面与第三轨迹面之间设置止回台阶,第三轨迹面和第四轨迹面之间设置止回台阶,第四轨迹面和第一轨迹面之间设置止回台阶,从而保证限位件仅能按照预设的活动轨迹动作。
57.可选地,限位件为伸缩杆640;当伸缩杆640由第一限位点m沿第一过渡面滑动至第二限位点n时,伸缩杆640的长度逐渐增大;当伸缩杆640由第二限位点n沿第二过渡面滑动至第一限位点m时,伸缩杆640的长度逐渐减小。
58.一种可能实现的方式中,为了保证限位件沿着预设的轨迹块630运动,轨迹块630的环形限位轨迹面采用不同高度实现,为了配合环形限位轨迹面,限位件采用伸缩杆640,当伸缩杆640由第一限位点m沿第一过渡面滑动至第二限位点n时,第一过渡面的高度逐渐减小,伸缩杆640的长度逐渐增大;当伸缩杆640由第二限位点n沿第二过渡面滑动至第一限位点m时,第二过渡面的高度逐渐增大,伸缩杆640的长度逐渐减小。
59.可选地,伸缩杆640包括固定轴641、浮动轴套642和弹性件643;浮动轴套642与轨迹块630滑动连接;固定轴641一端与第二连杆620连接,另一端与浮动轴套642套接;浮动轴套642可相对固定轴641沿其自身轴线方向滑动,也可相对固定轴641绕其自身轴线转动;固定轴641与浮动轴套642之间还设有用于限定浮动轴套642沿其自身轴线方向滑动极限位置的限位台阶644;弹性件643用于始终为浮动轴套642提供远离第二连杆620的作用力,以使浮动轴套642始终贴合在轨迹块630上。
60.一种可能实现的方式中,参照图7,伸缩杆640为浮动销组件,包括固定轴641、浮动轴套642和弹性件643,示例性的,弹性件643为弹簧。当伸缩杆640在踏板控制机构600的操作下,浮动轴套642在弹簧的作用下实现往复运动,保持紧贴轨迹块630轨迹运动。同时,浮动轴套642还可以绕固定轴641自转,将滑动摩擦转化为滚动摩擦,减少了浮动轴套642与轨迹块630内壁的摩擦阻力。
61.为了保证伸缩杆640始终沿着确定的轨迹运行,第一轨迹面631道第四轨迹面634存在一定的高度差,保证踏板500只能沿轨迹运动方向进行。如图8所示为浮动轴套642的轴向位移曲线。
62.轨迹块630和浮动销组件的特殊结构设计保证了整个中控脚轮控制装置过程的可靠实现。
63.可选地,伸缩杆640为弹性杆650。
64.一种可能实现的方式中,参照图9,伸缩杆640为弹性杆650,弹性杆650可以变形,利用自身的弹力使得弹性杆650始终沿着轨迹块630的环形轨迹面运动,始终贴合在轨迹块630上,实现与浮动销组件相同的功能。
65.可选地,传动机构包括传动带组件800。
66.一种可能实现的方式中,参照图10,传动机构包括与主动轴200同轴设置的主动带轮,与主动带轮通过第一传动带传动连接的第一从动带轮和第二从动带轮,与第一从动带轮同轴设置的第三从动带轮,与第二从动带轮同轴设置的第四从动带轮,与第三从动带轮通过第二传动带传动连接的第五从动带轮,与第四从动带轮通过第三传动带传动连接的第六从动带轮,第五从动带轮通过六角杆与中控脚轮上的凸轮连接,第六从动带轮通过另一六角杆与另一中控脚轮上的凸轮连接。
67.可选地,传动机构包括传动链组件。
68.一种可能实现的方式中,传动机构包括与主动轴同轴设置的主动链轮,与主动链轮通过第一传动链传动连接的第一从动链轮和第二从动链轮,与第一从动链轮同轴设置的第三从动链轮,与第二从动链轮同轴设置的第四从动链轮,与第三从动链轮通过第二传动链传动连接的第五从动链轮,与第四从动链轮通过第三传动链传动连接的第六从动链轮,第五从动链轮通过六角杆与中控脚轮上的凸轮连接,第六从动链轮通过另一六角杆与另一中控脚轮上的凸轮连接。
69.第二方面,参照图11,本实用新型的实施例还提供一种超声设备,包括:显示屏910、控制面板920、主机930以及如第一方面实施例中任一种控脚轮控制装置,主机930安装于中控脚轮控制装置的底板100上,显示屏910以及控制面板920均与主机930信号连接,且显示屏910以及控制面板920均安装在主机930上。
70.显然,本领域的技术人员可以对本实用新型实施例进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1