一种同轴穿刺用的远程辅助定位装置
1.本实用新型属于医用用具领域,具体涉及了一种同轴穿刺用的远程辅助定位装置。
背景技术:
2.恶性肿瘤是发病率和死亡率极高的疾病,能够有机会手术治疗的病人仅占少数,绝大多数的病人需要微创活检的方式获得病理诊断,病理诊断是恶性肿瘤诊断的金标准,没有病理诊断即没有肿瘤的治疗。ct引导下穿刺活检是微创活检的重要方法之一,ct可以为穿刺提供准确的穿刺进针点及肿瘤的位置,受到骨、血管、神经的阻挡,很多时候进针点与肿瘤所在靶目的地从上下左右两个面成一点的夹角,这个角度ct可给出,但是在实际穿刺中,常规的穿刺角度需要依靠经验丰富的穿刺人员主观把握。而对于经验不是很丰富的医护人员来说,其中常有或多或少的误差,操作调整增加手术出血和感染的风险。
3.所以当现场没有经验丰富的穿刺人员时,很容易出现穿刺事故。
技术实现要素:
4.针对上述存在的技术问题,本实用新型提出了一种同轴穿刺用的远程辅助定位装置。
5.为了实现上述目的,本实用新型所采用的技术方案是,一种同轴穿刺用的远程辅助定位装置,包括支撑板,还包括:限位板,安装在支撑板两端,与支撑板滑动连接;滑轨,安装在支撑板两侧,与支撑板固定连接,与限位板滑动连接;定位机构,安装在滑轨上,与滑轨滑动连接;驱动模块,安装在定位机构上,用于驱动定位机构的运动;控制模块,安装在支撑板上,与驱动模块电连接,用于控制驱动模块。
6.作为优选,所述的定位机构包括:半环体,两端分别安装在支撑板两侧的滑轨上,与滑轨滑动连接;定位器,安装在半环体上,与半环体滑动连接。
7.作为优选,所述的定位器包括:连接环,安装在半环体上,与半环体滑动连接;连接壳,与连接环位于半环体内壁上的侧面固定连接;激光定位头,尾部安装在连接壳中,端部伸出连接壳用于发射激光,与连接壳连接。
8.作为优选,所述的驱动模块包括:第一驱动模块,安装在滑轨上,与控制模块电连接,用于驱动半环体在滑轨上进行往复运动;第二驱动模块,安装在连接环上,与控制模块电连接,用于驱动定位器在半环体上运动;第三驱动模块,安装在连接壳中,与控制模块电连接,用于调整激光定位头的角度。
9.作为优选,所述的第三驱动模块包括:第一伸缩杆,一端与连接壳的内壁铰接,另一端与激光定位头的端部铰接;第二伸缩杆,一端与连接壳的内壁铰接,另一端与激光定位头的端部铰接,且与第一伸缩杆之间存在夹角;第一气泵,与第一伸缩杆连接,与控制模块电连接,用于驱动第一伸缩杆的伸缩;第二气泵,与第二伸缩杆连接,与控制模块电连接,用于驱动第二伸缩杆的伸缩。
10.本实用新型的有益效果:有经验的穿刺人员可以根据ct给出的角度,远程给控制模块下达指令,使得定位机构移动到需要穿刺的位置,并且调整连接环的位置以及定位激光头的射出角度,使得激光可以以一个正确的调度照射在患者身体上,现场的穿刺者只需要根据激光的射出角度以及在人体上的落点进行穿刺即可,极大的避免了由于穿刺者经验不足而发生穿刺事故的情况,而且其中限位板可以明确的得打患者在支撑板上的位置,使得对需要穿刺的位置定位更加准确。
附图说明
11.为了更清楚地说明本实用新型具体实施方式,下面将对具体实施方式中所需要使用的附图作简单地介绍。在所有附图中,各元件或部分并不一定按照实际的比例绘制。
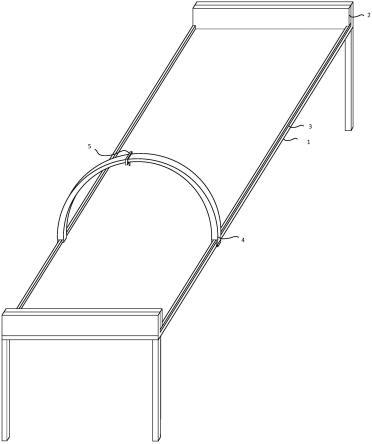
12.图1该定位装置的整体结构示意图;
13.图2连接壳内部结构示意图;
14.图3该定位装置整体连接关系;
15.附图标记:
16.1-支撑板,2-限位板,3-滑轨,4-半环体,5-连接环,6-激光定位头,7
‑ꢀ
连接壳,8-第一伸缩杆,9-第二伸缩杆,10-控制模块,11-第一驱动模块,12
‑ꢀ
第二驱动模块,13-第三驱动模块。14-第一气泵,15-第二气泵。
具体实施方式
17.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
18.一种同轴穿刺用的远程辅助定位装置,包括支撑板1,还包括:限位板2、滑轨3、定位机构、驱动模块和控制模块10。限位板2安装在支撑板1两端,与支撑板1滑动连接。滑轨3安装在支撑板1两侧,与支撑板1固定连接,与限位板2滑动连接。控制模块10安装在支撑板1上,与驱动模块电连接,用于控制驱动模块。控制模块10中设置有无线通信模块,使得该远程辅助定位装置可以被远程控制。
19.定位机构安装在滑轨3上,与滑轨3滑动连接。定位机构包括:半环体4 和定位器。半环体4的两端分别安装在支撑板1两侧的滑轨3上,与滑轨3 滑动连接。定位器,安装在半环体4上,与半环体4滑动连接。
20.定位器包括:连接环5、连接壳7和激光定位头6。连接环5安装在半环体4上,与半环体4滑动连接。连接壳7与连接环5位于半环体4内壁上的侧面固定连接。激光定位头6的尾部安装在连接壳7中,端部伸出连接壳7用于发射激光,与连接壳7连接。其中滑轨3以及连接环5上都设置有度数。滑轨 3上的度数为距离长度度数,连接环5上的度数为角度度数。
21.驱动模块安装在定位机构上,用于驱动定位机构的运动。驱动模块包括:第一驱动模块11、第二驱动模块12和第三驱动模块13。第一驱动模块11安装在滑轨3上,与控制模块10电连接,用于驱动半环体4在滑轨3上进行往复运动。第二驱动模块12安装在连接环5上,与控制模块电连接,用于驱动定位器在半环体4上运动。第三驱动模块13安装在连接壳7中,与控制模块电连接,用于调整激光定位头6的角度。
22.第三驱动模块13包括:第一伸缩杆8、第二伸缩杆9、第一气泵14和第二气泵15。第一伸缩杆8的一端与连接壳7的内壁铰接,另一端与激光定位头6的端部铰接。第二伸缩杆9的一端与连接壳7的内壁铰接,另一端与激光定位头6的端部铰接,且与第一伸缩杆8之间存在夹角。第一气泵14与第一伸缩杆8连接,与控制模块10电连接,用于驱动第一伸缩杆8的伸缩。第二气泵15与第二伸缩杆9连接,与控制模块10电连接,用于驱动第二伸缩杆9 的伸缩。
23.有经验的穿刺人员可以根据ct给出的角度,远程给控制模块10下达指令,使得定位机构移动到需要穿刺的位置,并且调整连接环5的位置以及定位激光头的射出角度,使得激光可以以一个正确的调度照射在患者身体上,现场的穿刺者只需要根据激光的射出角度以及在人体上的落点进行穿刺即可,极大的避免了由于穿刺者经验不足而发生穿刺事故的情况,而且其中限位板2可以明确的得打患者在支撑板1上的位置,使得对需要穿刺的位置定位更加准确。本技术中的辅助定位装置可以在房间中使用,也可以在行驶的列车上使用,使用场景多种多样。
24.具体的,在使用时,让患者躺在支撑板1上,然后现在的医护人员移动两块限位板2,使得两块限位板2分别抵在患者的头部和脚部,并或者限位板2 在滑轨3上的位置,将位置结果输入到控制模块10中。远程的有经验者根据两块限位板2的位置数据,输入半环体4需要运动到的滑轨3位置,以及连接环5需要在半环体4上运动到的角度位置,同时还有激光定位头6端部的角度,使得激光定位头6端部发出的激光可以照射到患者的身体上,照射点为穿刺点,而激光的光路角度则为穿刺角度。
25.在穿刺人员进行穿刺时,可以通过观察落在穿刺针上的光斑大小来判断穿刺针是否处于激光的光路中,当穿刺针的尾部出现了圆形高亮光斑则说明穿刺针位于激光的光路上。
26.在调整激光定位头6角度时,根据实际的情况,使得第一气泵14和第二气泵15分别对第一伸缩杆8和第二伸缩杆9进行充气或者抽气,使得第一伸缩式杆以及第二伸缩杆9对激光定位头6的尾部进行推拉,使得激光定位头6 产生倾斜,进而实现对激光光路角度的控制。
27.以上实施例仅用以说明本实用新型的技术方案,而非对其限制。尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换。而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1