用于外骨骼机器人的平衡辅助装置的制作方法
1.本实用新型属于外骨骼机器人设备技术领域,尤其涉及用于外骨骼机器人的平衡辅助装置。
背景技术:
2.外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术,人体外骨骼助力机器人起源于美国1966年的哈德曼助力机器人的设想及研发,到今天整体仍处于研发阶段,能源供给装置以及高度符合人体动作敏捷及准确程度要求的控制系统和力的传递装置都有待大力投入研发和试验尝试。以下是近些年有代表性的研究成果。
3.但是现有的外骨骼机器人在使用时,一般只为了辅助人体行走,但是刚适应的人体还是有较大的体力消耗的,当人体感觉疲劳不想继续使用,而人体又无法完成自行行走时,外骨骼机器人将无法使人在体力消耗较小的情况下继续使用,导致外骨骼机器人使用受限的问题。
技术实现要素:
4.本实用新型提供用于外骨骼机器人的平衡辅助装置,旨在解决人体感觉疲劳不想继续使用,而人体又无法完成自行行走时,外骨骼机器人将无法使人在体力消耗较小的情况下继续使用,导致外骨骼机器人使用受限的问题。
5.本实用新型是这样实现的,用于外骨骼机器人的平衡辅助装置,包括机器人本体、连接机构和移动机构,所述连接机构固接于机器人本体的底部,所述移动机构固接于连接机构的外表面一侧;
6.所述连接机构由连接块、气缸和第一固定柱组成,所述连接块固接于机器人本体的底部两侧,所述气缸固接于两个连接块的顶部,所述第一固定柱固接于两个气缸的底部,两个所述连接块的一端均滑动插接有两个插柱,所述插柱的一端固接有移动件,所述移动件的底部固接有两个第二固定柱,两个所述第二固定柱的底部固接有两个万向轮;
7.所述移动机构由移动件、旋转轴和滚轮组成,所述移动件的顶部固接有扶手,所述移动件安装于一个第一固定柱的外表面一侧,所述旋转轴的一端固接于移动件的输出轴,所述滚轮固定套接于旋转轴的外表面,使得机器人在无法继续带动人体行走时,避免了机器人的使用受限问题。
8.优选的,所述滚轮的数量为两个,两个所述滚轮对称固接于旋转轴的外表面,且两个所述旋转轴与两个万向轮分别与地面相贴合,通过两个滚轮的转动代替机器人带动人体的移动。
9.优选的,两个所述气缸分别固接于两个连接块的底部,且两个所述气缸的一端分别固接于两个第一固定柱的顶部,从而通过滚轮和万向轮的配合,切换人体行走的方式。
10.优选的,所述连接块的外表面一侧固接有两个固定块,所述移动件的外表面安装
有第一电机和第二电机,所述第一电机和第二电机的输出轴均固接有螺纹杆,从而使得人体能舒适的使用扶手支撑双手,起到节约体力和行走平稳的作用。
11.优选的,所述插柱的数量为六个,所述连接块的两端均开设有两个插孔,四个所述插柱的一端分别滑动插接于四个插孔的内部,两个所述固定块的一端均开设有一个插口,另两个所述插柱分别滑动插接于两个插口的内部,使得连接块与移动件之间的间距增加时,提高连接块和移动件之间的受力强度。
12.优选的,两个所述固定块的一端分别开设有两个螺纹孔,且两个所述螺纹杆的一端分别螺纹插接于两个螺纹孔的内部,从而调整连接块与移动件之间的间距。
13.与现有技术相比,本实用新型的有益效果是:
14.1.通过本实用新型的连接机构和移动机构,当使用者需要使用机器人时,通过两个气缸的收缩,利用两个第一固定柱将两个滚轮升起远离地面,即可通过两个万向轮与地面的接触,避免人体在运动机器人时的不稳定,通过扶手可将人体的手放上并扶稳,当人体使用疲惫且无法继续利用机器人行走时,通过两个气缸的伸起,将两个滚轮落至地面,即可通过两个万向轮和两个滚轮将人体撑起,此时通过开启移动件,利用旋转轴带动两个滚轮转动,即可利用机械装置代替人体行走,避免人体过多体力的消耗,使得机器人在无法继续带动人体行走时,避免了机器人的使用受限问题。
15.2.通过本实用新型的滚轮和万向轮的结构设计,便于通过两个滚轮的设置,使得人体在疲惫且无法继续利用机器人行走时,通过两个滚轮的转动代替机器人带动人体的移动。
16.3.通过本实用新型的螺纹杆和第一电机的结构设计,便于通过开启第一电机和第二电机时,利用两个螺纹杆的转动,从而调节移动件与连接块之间的间距,从而使得人体能舒适的使用扶手支撑双手,起到节约体力和行走平稳的作用。
附图说明
17.图1为本实用新型的机器人本体正视结构示意图;
18.图2为本实用新型的机器人本体背视结构示意图;
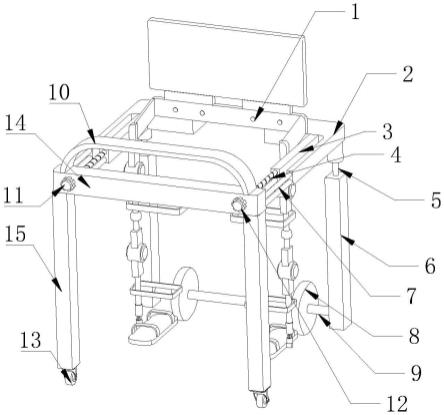
19.图3为本实用新型的机器人本体侧视结构示意图;
20.图4为本实用新型的机器人本体仰视结构示意图;
21.图中:1、机器人本体;2、连接块;3、固定块;4、螺纹杆;5、气缸;6、第一固定柱;7、插柱;8、滚轮;9、旋转轴;10、扶手;11、第一电机;12、第二电机;13、万向轮;14、移动件;15、第二固定柱。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.请参阅图1-4,本实用新型提供用于外骨骼机器人的平衡辅助装置技术方案:包括机器人本体1、连接机构和移动机构,所述连接机构固接于机器人本体1的底部,所述移动机构固接于连接机构的外表面一侧;
24.所述连接机构由连接块2、气缸5和第一固定柱6组成,所述连接块2固接于机器人本体1的底部两侧,所述气缸5固接于两个连接块2的顶部,所述第一固定柱6固接于两个气缸5的底部,两个所述连接块2的一端均滑动插接有两个插柱7,所述插柱7的一端固接有移动件14,所述移动件14的底部固接有两个第二固定柱15,两个所述第二固定柱15的底部固接有两个万向轮13;
25.所述移动机构由移动件14、旋转轴9和滚轮8组成,所述移动件14的顶部固接有扶手10,所述移动件14安装于一个第一固定柱6的外表面一侧,所述旋转轴9的一端固接于移动件14的输出轴,所述滚轮8固定套接于旋转轴9的外表面。
26.在本实施方式中,当使用者需要使用机器人时,通过两个气缸5的收缩,利用两个第一固定柱6将两个滚轮8升起远离地面,即可通过两个万向轮13与地面的接触,避免人体在运动机器人时的不稳定,通过扶手10可将人体的手放上并扶稳,当人体使用疲惫且无法继续利用机器人行走时,通过两个气缸5的伸起,将两个滚轮8落至地面,即可通过两个万向轮13和两个滚轮8将人体撑起,此时通过开启移动件14,利用旋转轴9带动两个滚轮8转动,即可利用机械装置代替人体行走,避免人体过多体力的消耗,使得机器人在无法继续带动人体行走时,避免了机器人的使用受限问题。
27.进一步的,所述滚轮8的数量为两个,两个所述滚轮8对称固接于旋转轴9的外表面,且两个所述旋转轴9与两个万向轮13分别与地面相贴合。
28.在本实施方式中,便于通过两个滚轮8的设置,使得人体在疲惫且无法继续利用机器人行走时,通过两个滚轮8的转动代替机器人带动人体的移动。
29.进一步的,两个所述气缸5分别固接于两个连接块2的底部,且两个所述气缸5的一端分别固接于两个第一固定柱6的顶部。
30.在本实施方式中,便于通过两个气缸5的设置,使得能将两个滚轮8进行升降,从而通过滚轮8和万向轮13的配合,切换人体行走的方式。
31.进一步的,所述连接块2的外表面一侧固接有两个固定块3,所述移动件14的外表面安装有第一电机11和第二电机12,所述第一电机11和第二电机12的输出轴均固接有螺纹杆4。
32.在本实施方式中,便于通过开启第一电机11和第二电机12时,利用两个螺纹杆4的转动,从而调节移动件14与连接块2之间的间距,从而使得人体能舒适的使用扶手10支撑双手,起到节约体力和行走平稳的作用。
33.进一步的,所述插柱7的数量为六个,所述连接块2的两端均开设有两个插孔,四个所述插柱7的一端分别滑动插接于四个插孔的内部,两个所述固定块3的一端均开设有一个插口,另两个所述插柱7分别滑动插接于两个插口的内部。
34.在本实施方式中,便于通过六个插柱7和两个螺纹杆4的设置,不仅可调节连接块2与移动件14之间的间距,也可通过插柱7和螺纹杆4的设置,使得连接块2与移动件14之间的间距增加时,提高连接块2和移动件14之间的受力强度。
35.进一步的,两个所述固定块3的一端分别开设有两个螺纹孔,且两个所述螺纹杆4的一端分别螺纹插接于两个螺纹孔的内部。
36.在本实施方式中,便于通过两个螺纹杆4的设置,使得在开启第一电机11和第二电机12时,能通过两个螺纹杆4分别转动两个固定块3的内部,从而调整连接块2与移动件14之
间的间距。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1