一种手术工具以及手术机器人的制作方法
1.本实用新型涉及手术设备技术领域,更具体地说,是涉及一种手术工具以及手术机器人。
背景技术:
2.骨质疏松性骨折是骨质疏松症的严重后果,其主要由于全身骨骼骨量下降及有机结构的改变,生物力学性能也出现明显变化,主要是抗压缩、抗扭转强度等显著减少,经轻微的外力作用即可能导致骨折。骨质疏松症患者最常发生的是脊柱骨折,其表现为椎体的压缩骨折,称为骨质疏松性椎体压缩骨折。
3.经皮椎体成形术(percutaneous vertebroplasty,pvp)、经皮椎体后凸成形术(percutaneous kyphoplasty,pkp)是通过灌注骨水泥黏合骨折部位并加固椎体,达到快速缓解疼痛和恢复活动功能的目的,现已成为临床上治疗骨质疏松性椎体压缩性骨折的重要手段。目前大多数pvp/pkp手术通过临床医生徒手穿刺进行,穿刺过程完全依靠临床医生的个人经验。人手操作的准确性和稳定性不足,意味着手术中需反复穿刺和反复的x线透视,以及更高的神经损伤风险。机器人辅助手术技术的在pvp和pkp手术中的应用,实现了穿刺路径的精确定位。在采用机器人辅助完成pvp/pkp手术时,利用患者医学图像实现精准的规划,利用机器人精确运动实现手术穿刺通道的精准的位置确定,医生在机器人的引导下可准确找到穿刺的平面位置,但是深度位置仍不易确定,穿刺过程中过深极易造成穿破脊柱椎体皮质,从而损伤前方血管等组织。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本实用新型的目的在于提供一种手术工具以及手术机器人,实现导针穿刺深度能够实时跟踪,防止穿刺过程中过深导致导针穿破脊柱椎体皮质、损伤前方血管等组织的问题。
6.为实现上述目的,本实用新型采用的技术方案是:
7.一方面,本实用新型提供一种手术工具,包括:
8.穿刺针;
9.灌注套管,灌注套管活动套设在穿刺针上;
10.跟踪器,跟踪器连接在穿刺针的尾端,跟踪器用于检测穿刺针的首端所在位置,且通过外部显示设备显示首端所在位置。
11.在一个实施例中,跟踪器通过连接架连接在穿刺针的尾端;
12.连接架包括:连接台,连接台可拆卸连接在穿刺针上;
13.延伸杆,延伸杆的一端连接在连接台上,并位于穿刺针的一侧;
14.安装板,安装板连接在延伸杆的另一端,跟踪器可拆卸连接在安装板上。
15.在一个实施例中,灌注套管包括:管体,管体内设置有灌注通道,穿刺针穿设在灌
注通道内;
16.推移部,推移部连接在管体的尾端。
17.在一个实施例中,穿刺针上设置有标记部,标记部到穿刺针的首端的距离等于管体的长度。
18.在一个实施例中,管体的首端设置有齿形刃口。
19.在一个实施例中,穿刺针上设置有限深保护支架,限深保护支架用于限制穿刺针伸入到人体内的深度;
20.限深保护支架包括:支撑架体,支撑架体固定连接在穿刺针上;
21.多个可调限位脚,多个可调限位脚设置在所述支撑架体上并环绕穿刺针。
22.在一个实施例中,可调限位脚包括:调整块,调整块内设置有导向孔,导向孔内设置有弹性卡舌;
23.支撑脚,支撑脚的侧壁上设置有卡齿,弹性卡舌与卡齿相配合,并使支撑脚位于导向孔内沿朝向人体的方向单向移动。
24.在一个实施例中,支撑脚的首端设置有垫块。
25.在一个实施例中,调整块铰接在支撑架体上,支撑架体上还设置有卡紧部,调整块通过卡紧部的作用而使支撑脚与穿刺针呈预设角度固定。
26.另一方面,本实用新型还提供一种手术机器人,其中,包括机器人本体,连接在机器人本体上的导向器,以及如上述的手术工具,手术工具设置在导向器内。
27.本实用新型提供的一种手术工具以及手术机器人的有益效果至少在于:在pvp/pkp手术时,在穿刺针的尾端设置跟踪器,用于检测穿刺针首端的位置。当穿刺针的首端进入到人体内后,通过外部显示设备显示跟踪器的位置,可将穿刺针的首端的深度显示出来,使用者可直接观察到穿刺针的首端位置和深度从而将穿刺针的首端穿刺到预设位置,从而对穿刺针的首端的深度实时跟踪,防止穿刺过程中过深造成穿破脊柱椎体皮质、损伤前方血管等组织的问题,通过深度实时跟踪,也能加快手术进度。
附图说明
28.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.图1为本实用新型实施例提供的一种手术机器人的结构示意图;
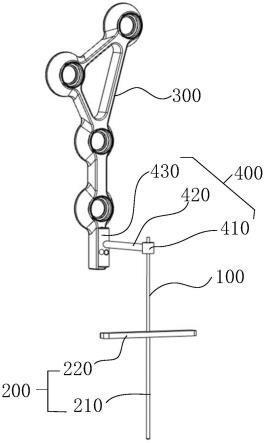
30.图2为本实用新型实施例提供的一种手术工具的结构示意图;
31.图3为本实用新型实施例提供的一种手术工具的限深保护支架的结构示意图;
32.图4为本实用新型实施例提供的一种手术工具的局部剖视图;
33.图5为图4的a部放大图。
34.其中,图中各附图标记:
35.10、手术工具;20、机器人本体;30、导向器;100、穿刺针;110、标记部;200、灌注套管;210、管体;220、推移部;300、跟踪器;400、连接架;410、连接台;420、延伸杆;430、安装板;500、限深保护支架;510、支撑架体;520、可调限位脚;521、调整块;522、支撑脚;523、导
向孔;524、弹性卡舌;525、卡齿;526、垫块;530、卡紧部;531、卡板;532、拧紧螺钉。
具体实施方式
36.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
37.需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在采用机器人辅助完成pvp/pkp手术时,利用患者医学图像是实现精准的规划,利用机器人精确运动实现手术穿刺通道的精准定位,医生在机器人的引导下可准确将导针穿刺到脊柱椎体内需注入骨水泥的位置,避免神经和血管损伤。现有的手术工具需要通过透视图像观察,透视图像需要采用x线成像,这样增加了x线暴露的风险,而且采用x线成像需要另外操作其他x成像设备,能导致手术操作不方便,且延长了手术时间。
39.请参阅图1和图2,本实施例提供了一种手术工具10,该手术工具10可用于骨水泥灌注,包括:穿刺针100、灌注套管200以及跟踪器300。穿刺针100用于对患者进行穿刺造通,穿刺通道的深度位置是否精准需要通过穿刺针100的位置确定。灌注套管200活动套设在穿刺针100上,灌注套管200在穿刺针100的引导下推移到穿刺的通道内,并用于引导骨水泥进行浇灌。跟踪器300连接在穿刺针100的尾端,跟踪器300用于检测穿刺针100的首端所在位置,且通过外部显示设备显示首端所在位置;跟踪器300可以为手术光学跟踪器,适用于机械臂末端与光学跟踪器的精确定位。
40.本实施例提供的一种手术工具10的工作原理如下:在pvp/pkp手术时,在穿刺针100的尾端设置跟踪器300,由于穿刺针100的长度一定,那么跟踪器300与穿刺针100首端的距离是预设确定的,只要知道跟踪器300的位置,那么就能确定穿刺针100首端的位置,因此通过跟踪器300对穿刺针100的首端位置进行检测。当穿刺针100的首端进入到人体内后,通过跟踪器300所检测到的位置能确定穿刺针100的首端的深度位置,进而将深度位置发送到外部显示设备,通过外部显示设备可将穿刺针100的首端的深度显示出来,使用者可直接观察到穿刺针100的首端位置和深度从而将穿刺针100的首端穿刺到预设位置;再朝向穿刺针100的首端推动灌注套管200,使灌注套管200沿穿刺针100进入脊柱椎弓根,直至达到预设位置;撤离穿刺针100后,再灌注骨水泥。
41.通过设置跟踪器300使穿刺针100的首端位置能被外部显示设备实时显示,从而对穿刺针100的首端的深度实时跟踪,防止穿刺过程中过深造成穿破脊柱椎体皮质、损伤前方血管等组织的问题,通过深度实时跟踪,也能加快手术进度。
42.本方案中,穿刺针100不管采用何种结构形式能实现穿刺功能,灌注套管200不管采用何种形式能实现灌注功能,跟踪器300不管采用何种结构能实现深度定位功能;也就是
说,本实施例中的穿刺针100的具体形式,灌注套管200的具体形式,以及跟踪器300的具体形式是可根据需要而预先设置的,只要设置后的跟踪器300能实现检测穿刺针100的首端所在位置,均可解决现有技术中的问题,并取得相应的效果。
43.为方便结构描述,以伸入到人体的一端为首端,与首端相对立的一端为尾端。本实施例中的部件均参考该方向进行结构描述。
44.进一步地,如图2所示,本实施例中的跟踪器300通过连接架400连接在穿刺针100的尾端。连接架400包括:连接台410,延伸杆420,以及安装板430。连接台410可拆卸连接在穿刺针100上;具体结构中,连接台410为圆台,圆台的端面中点处开设卡孔,所述穿刺针100的尾端卡嵌固定在卡孔中。延伸杆420的一端连接在连接台410上,并位于穿刺针100的一侧;具体为,延伸杆420连接在连接台410的侧面上,并沿连接台410的径向进行延伸,可以是与径向平行方向延伸,也可以是沿倾斜于径向方向进行延伸。安装板430连接在延伸杆420的另一端,跟踪器300通过螺钉可拆卸连接在安装板430上。通过设置连接架400,使跟踪器300位于穿刺针100的一侧,由于连接架400的尺寸是固定的,那么跟踪器300与穿刺针100首端的位置也固定,不影响穿刺针100首端的位置定位。而使跟踪器300偏离于穿刺针100的轴向设置,可以不干涉穿刺针100的正常使用,便于医生对穿刺针100进行敲击等操作。
45.进一步地,如图2、图3所示,灌注套管200包括:管体210,以及推移部220。管体210内设置有灌注通道,穿刺针100穿设在灌注通道内,推移部220连接在管体210的尾端。推移部220为推移板,位于管体210尾端的径向上延伸。推移部220主要方便管体210的推动,当需要将管体210沿穿刺针100进行推移时,可以直接手抵推移部220进行施力,从而推动管体210移动,方便医生的使用。
46.进一步地,请参阅图3,穿刺针100上设置有标记部110,标记部110到穿刺针100的首端的距离等于管体210的长度。标记部110主要是在穿刺针100上作位置标记,标记部110可以是标记线,当灌注套管200沿穿刺针100进行推动时,将灌注套管200的推移部220的尾端面推动到标记部110的位置,这样使灌注套管200的首端与穿刺针100的首端位置齐平,从而认为灌注套管200到达人体内的预设位置。
47.进一步地,管体210的首端设置有齿形刃口(图示中未画出)。在管体210插入到人体内时更容易通过齿形刃口插入到椎体,使管体210与椎体更容易连接稳定,而且齿形刃口可以作为额外的骨水泥出口,对椎体填充水泥。
48.如图3、图4所示,进一步地,穿刺针100上固定或可拆卸设置有限深保护支架500,灌注套管位于限深保护支架500的下方,限深保护支架500用于限制穿刺针100伸入到人体内的深度。当穿刺针100伸入到预设位置后,需要将灌注套管200沿着穿刺针100进行下推,而下推过程中会因为摩擦或挤压等原因会带动穿刺针100继续下移,从而导致穿刺针100损伤前方组织。而通过限深保护支架500,可以对到达预设位置的穿刺针100进行限位,防止穿刺针100继续向下移动而导致穿破脊柱椎体皮质,损伤前方血管组织。
49.如图3、图4所示,本实施例中的限深保护支架500包括:支撑架体510,以及多个可调限位脚520。支撑架体510固定连接在穿刺针100上;多个可调限位脚520设置在支撑架体510上并环绕穿刺针100,每个可调限位脚520与穿刺针100呈预设角度,例如预设角度为0度,即每个可调限位脚520沿平行于穿刺针100的轴向设置在支撑架体510上。本实施例中的可调限位脚520设置为3个,相互之间间隔120
°
设置,这样限位更稳定。通过支撑脚522抵靠
在患者皮肤表面,使支撑脚522的长度固定,这样支撑脚522支撑穿刺针100,那么对穿刺针100的伸入深度进行限位,不易造成穿刺针100继续向下移动而导致穿破脊柱椎体皮质的问题。
50.如图4、图5所示,进一步地,可调限位脚520包括:调整块521,以及支撑脚522。调整块521内设置有导向孔523,导向孔523内设置有弹性卡舌524;支撑脚522的侧壁上设置有卡齿525,弹性卡舌524与卡齿525相配合,并使支撑脚522位于导向孔523内沿朝向人体的方向单向移动。通过弹性卡舌524与卡齿525的配合,当支撑脚522向下推动时,支撑脚522上的卡齿525挤压弹性卡舌524,由于弹性卡舌524的弹性,使支撑脚522向下移动,而弹性卡舌524归位后,对支撑脚522上的卡齿525限位,使支撑脚522不能朝上移动,从而形成支撑脚522的单向向下推动。当支撑脚522的首端推动到与人体表面抵靠并形成支撑后,不再移动支撑脚522,而支撑脚522无法向上移动,从而使穿刺针100不再向下移动,对穿刺针100进行有效限位。当抽出穿刺针100后,可以通过拨动弹性卡舌524,使弹性卡舌524与卡齿525脱离,从而抽动支撑脚522。
51.如图3、图4所示,进一步地,支撑脚522的首端设置有垫块526。垫块526可以是橡胶块,通过垫块526使支撑脚522与人体皮肤表面的接触面积较大。这样进行支撑时人体皮肤受压强较小,减少人体表面的不舒适感。
52.如图3、图4所示,进一步地,调整块521铰接在支撑架体510上,支撑架体510上还设置有卡紧部530,调整块521通过卡紧部530的作用而使支撑脚522与穿刺针100呈预设角度固定。通过将调整块521间隙铰接,使调整块521可在支撑架上的位置进行调整,这样使支撑脚522与穿刺针100之间的预设角度可调整。需要调整支撑脚522的角度时,松开卡紧部530,从而使调整块521活动,当将支撑脚522调整到适合角度后,拧紧卡紧部530,从而使调整块521固定在支撑架体510上。
53.如图3、图5所示,本实施例中的调整块521的两端设置铰接凸台,通过铰接凸台可转动连接在支撑架体510上。支撑架体510上固定设置有两侧卡板531,调整块521铰接在两侧卡板531之间,卡紧部530包括在两侧卡板531的开口端设置的拧紧螺钉532,通过拧紧螺钉532可以使两侧卡板531相互压紧或松开。
54.如图1所示,本实用新型实施例还提供一种手术机器人,其中,包括机器人本体20,连接在机器人本体20上的导向器30,以及如上所述的手术工具10,使用时手术工具10设置在导向器30内。具体为机器人本体20包括机械臂,导向器30连接在机械臂上。手术工具10设置在导向器30内,并通过机械臂的配合,进行机器人辅助完成pvp/pkp手术,利用患者医学图像是实现精准的规划,利用机器人精确运动实现手术穿刺通道的精准定位,医生在机器人的引导下可准确将穿刺针100穿刺到脊柱椎体内需注入骨水泥的位置,避免神经和血管损伤。
55.相比于目前大多数pvp手术通过临床医生徒手穿刺进行,穿刺过程完全依靠临床医生的个人经验,造成人手操作的准确性和稳定性不足,手术中需反复穿刺和反复的x线透视,导致更高的神经损伤风险。而本方案采用机器人精确运动实现手术穿刺通道的精准定位,以及手术工具10能对穿刺深度实时跟踪,方便手术操作,大大提高手术的效率,不需要反复穿刺和反复的x线透视,减小手术风险,提高手术成功率。
56.本实施例中的手术机器人进行辅助pvp手术流程具体为:
57.步骤10、患者俯卧位,常规方法消毒,铺单。
58.步骤20、在患者背部安装患者跟踪器。
59.步骤30、行术中ct扫描,图像传输至手术机器人的手术规划和控制软件。
60.步骤40、在手术机器人的手术规划和控制软件中设计穿刺针穿刺路径。
61.步骤50、控制手术机器人移动,定位手术穿刺路径。
62.步骤60、在穿刺部位的皮肤进行局部麻醉并切开皮肤,沿手术机器人的导向器插入灌注套管和穿刺针进行穿刺,当灌注套管下降至导向器边缘无法下降后,敲击穿刺针使其经脊柱椎弓根进入脊柱椎体,敲击过程中通过手术规划和控制软件界面实时观察穿刺针位置和深度,确保按照规划路径穿刺,直至穿刺针的尖端(首端)达到预设位置。
63.步骤70、打开限深保护支架,敲击或旋转灌注套管,使其沿穿刺针进入脊柱椎弓根,直至穿刺针上的标记部(刻线)与灌注套管的尾部对齐,表明灌注套管达到预设位置。
64.步骤80、撤离机器人和穿刺针,从灌注套管灌注骨水泥。
65.步骤90、完成手术。
66.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1