一种医用机器人保护罩的制作方法
1.本实用新型属于医疗设备的防护领域,具体涉及一种医用机器人保护罩。
背景技术:
2.随着时代的发展,医学水平也在不断进步,越来越多的自动化设备如医用机器人被广泛应用到医疗检查以及手术过程中,但是医用机器人在使用时极易被污染,因此亟需一种防护装置既能够对医用机器人起到良好的保护作用,又不影响机器人的正常使用。
技术实现要素:
3.本实用新型的目的是提供一种医用机器人保护罩,以解决术中医用机器人易被污染的问题。
4.本实用新型的一种医用机器人保护罩是这样实现的:
5.一种医用机器人保护罩,包括
6.罩体,其一端为开口端,另一端设置有机械臂罩;
7.卡环,其安装在所述机械臂罩上,所述卡环包括环体,以及安装在所述环体外围的卡扣,所述卡扣包括两个与所述环体相连的连接臂,以及安装在两个连接臂之间的卡片,所述卡片的里端能够卡合在医用机器人的操作头外环面上。
8.进一步的,所述机械臂罩上设置有连接部,所述连接部固定在所述卡环的上端。
9.进一步的,所述连接部上设置有圆形的可撕部,所述可撕部与所述环体的内孔相对。
10.进一步的,所述可撕部的直径小于所述环体的内径,且所述可撕部的外表面设置有拉片。
11.进一步的,所述环体上部的外环面为锥面ⅰ。
12.进一步的,所述环体的下部为缩径部。
13.进一步的,所述缩径部的外环面为锥面ⅱ。
14.进一步的,所述连接臂的外端向外倾斜。
15.进一步的,所述卡片为弯折结构,其里端向内且向下延伸,其外端向外且向下延伸。
16.采用了上述技术方案后,本实用新型具有的有益效果为:
17.本实用新型能够对医用机器人起到良好的保护效果,并且通过卡环的设置,能够便于将适配的操作头与医用机器人的操作臂稳定连接,保证医用机器人的正常使用。
附图说明
18.下面结合附图和实施例对本实用新型进一步说明。
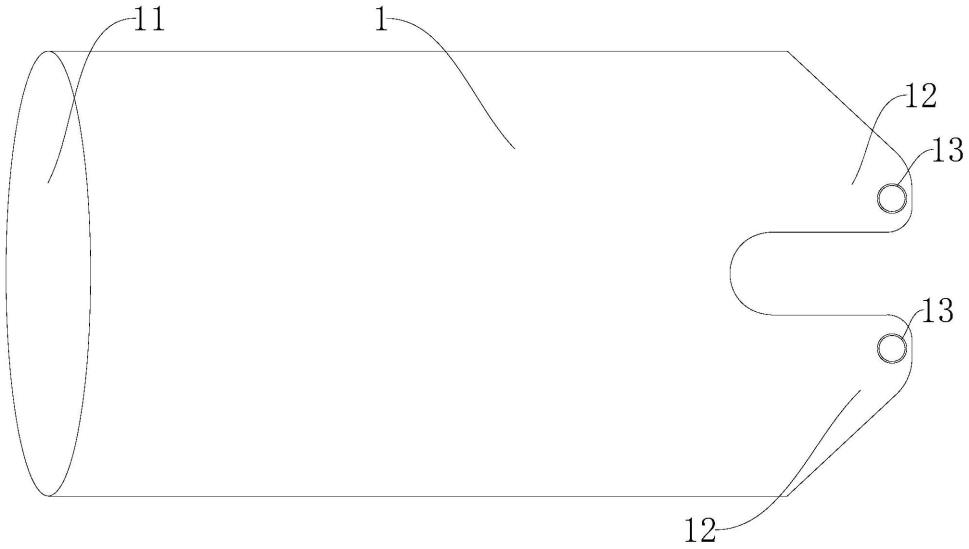
19.图1是本实用新型优选实施例的医用机器人保护罩的罩体的结构图;
20.图2是本实用新型优选实施例的医用机器人保护罩的卡环与连接部配合的结构
图;
21.图3是本实用新型优选实施例的医用机器人保护罩的卡环的剖面图;
22.图4是图3中a部分的放大图;
23.图5是本实用新型优选实施例的医用机器人保护罩的装配剖面图;
24.图6是图5中b部分的放大图;
25.图中:罩体1,开口端11,机械臂罩12,连接部13,可撕部14,拉片15,卡环2,环体21,卡扣22,连接臂23,卡片24,锥面ⅰ25,缩径部26,锥面ⅱ27,操作头3,环形槽31,操作臂4。
具体实施方式
26.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。
27.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
28.如图1-5所示,一种医用机器人保护罩,包括罩体1和卡环2,罩体1的其一端为开口端11,另一端设置有机械臂罩12;卡环2安装在机械臂罩12上,卡环2包括环体21,以及安装在环体21外围的卡扣22,卡扣22包括两个与环体21相连的连接臂23,以及安装在两个连接臂23之间的卡片24,卡片24的里端能够卡合在医用机器人的操作头3外环面上。
29.为了保证防护效果,罩体1与机械臂罩12为一体设置。且机械臂罩12的所在端是通过裁切、热封形成机械臂罩12的形状。
30.而为了便于观察医用机器人的运作情况,罩体1采用但不仅限于透明的pe材质。
31.在本实施例中,由于与其适配的医用机器人具有两个操作臂4,因此机械臂罩12设置有两个,而每个操作臂4上均装配有卡环2。
32.卡环2上卡扣22的数量可以根据需要选择,在本实施例中,环体21外部均匀设置三个卡扣22。为了方便机械臂罩12与卡环2的连接,机械臂罩12上设置有连接部13,连接部13固定在卡环2的上端。
33.在本实施例中,连接部13是用于实现机械臂罩12与卡环2的环体21配合。
34.优选的,卡环2可以采用焊接或粘合的放置固定在连接部13的外表面。
35.医用机器人在使用时,需要连接操作头3,而为了能够方便操作头3与操作臂4的连接,连接部13上设置有圆形的可撕部14,可撕部14与环体21的内孔相对。
36.在将操作头3与卡环2固定前,需要将可撕部14撕下,先实现操作臂4与操作头3的连接,继而再将操作头3固定在卡环2上。
37.为了保证机械臂罩12与卡环2连接的稳定性,可撕部14的直径小于环体21的内径。
38.可撕部14的外表面设置有拉片15。
39.拉片15可以粘合在可撕部14的外表面,其通过拉扯拉片15将可撕部14撕下,操作更加方便。
40.为了方便与操作臂4配合,环体21上部的外环面设置为锥面ⅰ25。
41.连接臂23的外侧面为与锥面ⅰ25配合的斜面,在将罩体1罩在医用机器人上后,环体21的上端则卡入操作臂4下端的内孔中,实现与操作臂4的配合。
42.优选的,锥面ⅰ25的上端外径小于其下端外径,可以更加便于环体21与操作臂4的配合。
43.为了便于环体21与操作头3的配合,环体21的下部为缩径部26。
44.在安装操作头3时,缩径部26伸入操作头3的内孔中,从而与操作头3配合。
45.为了增加与操作头3配合的便捷性,缩径部26的外环面为锥面ⅱ27。
46.具体的,锥面ⅱ27的上端外径大于其下端外径。
47.在于操作头3配合时,环体21的下端伸入操作头3内,而卡扣22需要卡合在操作头3的外壁上,因此,连接臂23的外端向外倾斜。
48.操作头3的外壁上设置有环形槽31,为了实现卡合的效果,卡片24为弯折结构,其里端向内且向下延伸,其外端向外且向下延伸。
49.自然状态下,三个卡片24的里端所形成的圆的直径小于操作头3的外径,在卡片24的里端卡在环形槽31内时,能够保证操作头3与卡环2配合的稳定性。
50.而卡片24外端的倾斜方式,能够在将卡环2与操作头3脱开时,方便向外拨动卡片24。
51.优选的,为了增加卡片24卡入环形槽31,以及从环形槽31中脱离的便捷性,卡片24的里端上表面和下表面均为斜面。
52.在使用医用机器人之前,将罩体1从其开口端11罩在医用机器人上,并将其操作臂4伸入两个机械臂罩12内,卡环2的上端则卡入操作臂4下端内部,然后撕下可撕部14,选择所需的操作头3将其与操作臂4进行连接,然后将操作头3装在卡环2的下端,即使环体21下部的缩径部26伸入操作头3内,并将卡片24的里端卡入操作头3的环形槽31中,此时即可使用医用机器人进行检查或手术操作。
53.结束后,向上拨动卡片24的外端,将卡片24的里端与环形槽31分离,此时即可将操作头3与卡环2分离,然后断开操作头3与操作臂4的连接即可。
54.若需要再次使用医用机器人,需要将保护罩进行更换,避免产生交叉感染。
55.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1