一种投球机器人
1.本实用新型属智能设备技术领域,具体涉及一种投球机器人。
背景技术:
2.全国大学生机器人大赛robocon以“绿茵争锋”为主题,将使用两台机器人和五个代表防守队员的立柱演绎7人制英式橄榄球比赛。比赛的亮点是两台机器人相互配合以触地球和踢球入门得分。比赛中主要和独特的挑战是踢球入门,想把独特形状的橄榄球踢过球门杆是不容易的,观众将会着迷于机器人成功实现所有目标。
3.现有的投球机器人(pr机器人)重力较为分散,在投球时不可避免会整车倾斜乃至翘起,安全性稳定性差。
技术实现要素:
4.为了解决上述问题,本实用新型提供了一种投球机器人,具体方案如下:
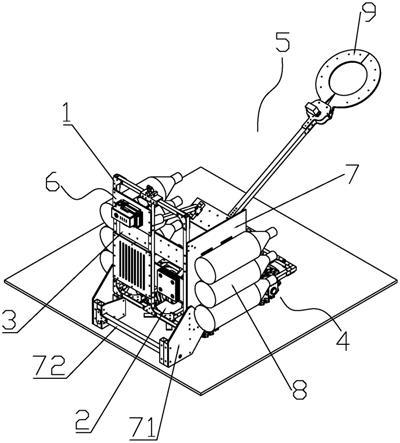
5.包括机架,所述机架上设有水平的底板,所述底板的其中一条侧边垂直设有侧板;所述底板的底面设有驱动件,所述底板的顶面铰接有投球件,所述侧板上设有电控件;
6.所述驱动件包括若干通过轮架连接于所述底板上的麦克纳姆轮,所述麦克纳姆轮的轮轴与所述底板和所述侧板均平行;
7.所述投球件包括投臂,所述投臂的一端用于放置球,所述投臂的另一端铰接于所述底板上;所述投臂还连接有动力装置,所述动力装置能够驱动所述投臂绕铰接端转动,所述投臂运动轨迹所在平面与所述底板和所述侧板均垂直;
8.所述电控件包括设于所述侧板上的电池架和固定板,所述电池架内设有与所述驱动件和所述投球件电连接的电池,所述固定板上设有与所述驱动件和所述投球件电连接的主控板。
9.进一步地,所述动力装置包括气缸,所述气缸的底部通过第一连接座与所述侧板铰接,所述气缸的输出端通过第二连接座铰接有中间板,所述中间板与所述投臂固定连接。
10.进一步地,所述机架上对应所述底板两条相对的侧边各设有一块连接板,两块所述连接板与所述底板和所述侧板均垂直;所述侧板的外侧设有对称设有高压气瓶组,所述高压气瓶组通过电控管路与所述气缸连接。
11.进一步地,所述投臂的自由端设有两个对称布置的夹爪,两个所述夹爪中间设有用于放置球的间隙。
12.进一步地,两个所述夹爪的末端成型为互相啮合的齿轮状结构,两个所述夹爪的末端均通过转轴设于基板的同一侧;所述基板的另一侧设有夹持电机,所述夹持电机的输出端穿过所述基板且套设有输出齿轮,所述输出齿轮与其中一个所述夹爪的末端保持啮合。
13.进一步地,两块所述连接板的底边靠近所述侧板的位置各连接有一块拓展支撑板。
14.进一步地,两块所述拓展支撑板之间通过加强杆连接。
15.本实用新型的有益效果在于:本实用新型提供了一种投球机器人,利用麦克纳姆轮实现快速响应调节机器人的运动方向,投球时整个结构稳定性高,整体设计结构简单布置合理,便于改装。
附图说明
16.图1.本实用新型的立体图,
17.图2.本实用新型的主视图,
18.图3.本实用新型的右视图,
19.图4.本实用新型的俯视图,
20.图5.本实用新型气缸的工作状态示意图,
21.图6.本实用新型夹爪的结构放大图。
22.附图序号及名称:1、机架,2、底板,3、侧板,4、驱动件,41、轮架,42、麦克纳姆轮,5、投球件,51、投臂,52、气缸,53、第一连接座,54、第二连接座,55、中间板,6、电控件,61、电池架,62、固定板,63、电池,7、连接板,71、拓展支撑板,72、加强杆,8、高压气瓶组,9、夹爪,91、基板,92、输出齿轮。
具体实施方式
23.下面结合附图和实施例对本实用新型作进一步的描述,下列实施例仅用于解释本实用新型的实用新型内容,不用于限定本实用新型的保护范围。
24.结合图1
‑
图4所示,一种投球机器人,包括机架1,机架1上设有水平的底板2,底板2的其中一条侧边垂直设有侧板3;底板2的底面设有驱动件4,底板2的顶面铰接有投球件5,侧板3上设有电控件6;
25.驱动件4包括若干通过轮架41连接于底板2上的麦克纳姆轮42,麦克纳姆轮42的轮轴与底板2和侧板3均平行;
26.投球件5包括投臂51,投臂51的一端用于放置球,投臂51的另一端铰接于底板2上;投臂51还连接有动力装置,动力装置能够驱动投臂51绕铰接端转动,投臂51运动轨迹所在平面与底板2和侧板3均垂直;
27.电控件6包括设于侧板3上的电池架61和固定板62,电池架61内设有与驱动件4和投球件5电连接的电池63,固定板62上设有与驱动件4和投球件5电连接的主控板。
28.如图5,动力装置包括气缸52(型号为mal16
‑
150),气缸52的底部通过第一连接座53与侧板3铰接,气缸52的输出端通过第二连接座54铰接有中间板55,中间板55与投臂51固定连接。
29.机架1上对应底板2两条相对的侧边各设有一块连接板7,两块连接板7与底板2和侧板3均垂直;侧板3的外侧设有对称设有高压气瓶组8,高压气瓶组8通过电控管路与气缸52连接。同时两侧的高压气瓶组也能够起到一定稳定机器人的作用。
30.如图6,投臂51的自由端设有两个对称布置的夹爪9,两个夹爪9中间设有用于放置球的间隙。
31.两个夹爪9的末端成型为互相啮合的齿轮状结构,两个夹爪9的末端均通过转轴设
于基板91的同一侧;基板91的另一侧设有夹持电机,夹持电机的输出端穿过基板91且套设有输出齿轮92,输出齿轮92与其中一个夹爪9的末端保持啮合。
32.通过夹持电机的正转反转,可以控制两个夹爪同步相向或相背运动,从而调整两个夹爪之间间隙的大小,从而控制抓球时的深度。
33.两块连接板7的底边靠近侧板3的位置各连接有一块拓展支撑板71,保证投球时整个机器人的稳定性。两块拓展支撑板71之间通过加强杆72连接,进一步提高两块拓展支撑板的稳定性。
34.综上,仅为本实用新型之较佳实施例,不以此限定本实用新型的保护范围,凡依本实用新型专利范围及说明书内容所作的等效变化与修饰,皆为本实用新型专利涵盖的范围之内。
技术特征:
1.一种投球机器人,包括机架(1),其特征在于:所述机架(1)上设有水平的底板(2),所述底板(2)的其中一条侧边垂直设有侧板(3);所述底板(2)的底面设有驱动件(4),所述底板(2)的顶面铰接有投球件(5),所述侧板(3)上设有电控件(6);所述驱动件(4)包括若干通过轮架(41)连接于所述底板(2)上的麦克纳姆轮(42),所述麦克纳姆轮(42)的轮轴与所述底板(2)和所述侧板(3)均平行;所述投球件(5)包括投臂(51),所述投臂(51)的一端用于放置球,所述投臂(51)的另一端铰接于所述底板(2)上;所述投臂(51)还连接有动力装置,所述动力装置能够驱动所述投臂(51)绕铰接端转动,所述投臂(51)运动轨迹所在平面与所述底板(2)和所述侧板(3)均垂直;所述电控件(6)包括设于所述侧板(3)上的电池架(61)和固定板(62),所述电池架(61)内设有与所述驱动件(4)和所述投球件(5)电连接的电池(63),所述固定板(62)上设有与所述驱动件(4)和所述投球件(5)电连接的主控板。2.根据权利要求1所述的一种投球机器人,其特征在于:所述动力装置包括气缸(52),所述气缸(52)的底部通过第一连接座(53)与所述侧板(3)铰接,所述气缸(52)的输出端通过第二连接座(54)铰接有中间板(55),所述中间板(55)与所述投臂(51)固定连接。3.根据权利要求2所述的一种投球机器人,其特征在于:所述机架(1)上对应所述底板(2)两条相对的侧边各设有一块连接板(7),两块所述连接板(7)与所述底板(2)和所述侧板(3)均垂直;所述侧板(3)的外侧设有对称设有高压气瓶组(8),所述高压气瓶组(8)通过电控管路与所述气缸(52)连接。4.根据权利要求1所述的一种投球机器人,其特征在于:所述投臂(51)的自由端设有两个对称布置的夹爪(9),两个所述夹爪(9)中间设有用于放置球的间隙。5.根据权利要求4所述的一种投球机器人,其特征在于:两个所述夹爪(9)的末端成型为互相啮合的齿轮状结构,两个所述夹爪(9)的末端均通过转轴设于基板(91)的同一侧;所述基板(91)的另一侧设有夹持电机,所述夹持电机的输出端穿过所述基板(91)且套设有输出齿轮(92),所述输出齿轮(92)与其中一个所述夹爪(9)的末端保持啮合。6.根据权利要求3所述的一种投球机器人,其特征在于:两块所述连接板(7)的底边靠近所述侧板(3)的位置各连接有一块拓展支撑板(71)。7.根据权利要求6所述的一种投球机器人,其特征在于:两块所述拓展支撑板(71)之间通过加强杆(72)连接。
技术总结
本实用新型涉及一种投球机器人,包括机架,机架上设有水平的底板,底板的其中一条侧边垂直设有侧板;底板的底面设有驱动件,底板的顶面铰接有投球件;驱动件包括若干通过轮架连接于底板上的麦克纳姆轮,麦克纳姆轮的轮轴与底板和侧板均平行;投球件包括投臂,投臂的一端用于放置球,投臂的另一端铰接于底板上;投臂还连接有动力装置,动力装置能够驱动投臂绕铰接端转动,投臂运动轨迹所在平面与底板和侧板均垂直。本实用新型利用麦克纳姆轮实现快速响应调节机器人的运动方向,投球时整个结构稳定性高,整体设计结构简单布置合理,便于改装。装。装。
技术研发人员:毕松 吴璇 谷卓赟 刘清扬 蔡子誉 韦楚钒 肖一飞 杨钒 栾欣旭
受保护的技术使用者:北方工业大学
技术研发日:2021.03.05
技术公布日:2021/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1